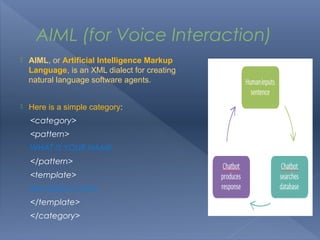
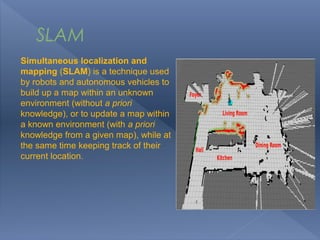
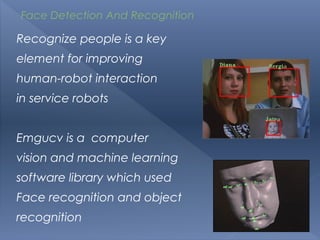
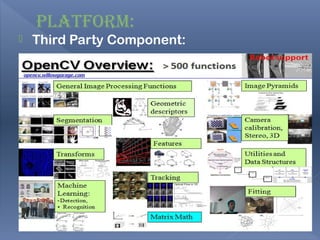
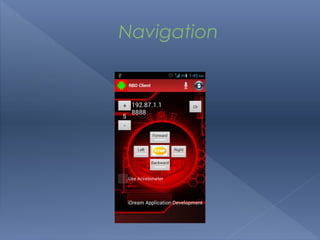
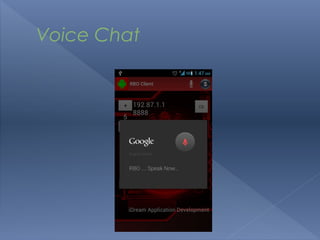
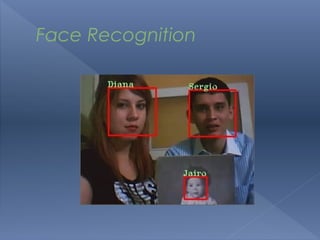
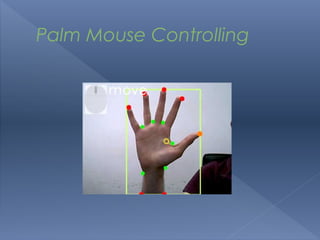
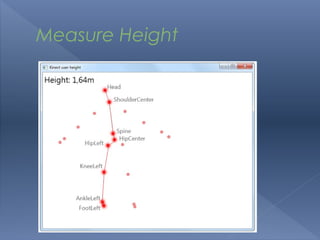
R-Bo is a programmable humanoid robot that can see, hear, speak and move. It uses C#.NET and Windows OS with the goal of bringing artificial intelligence into homes. R-Bo has capabilities in various domains including image processing, pattern recognition, and human-computer interaction. It is designed with hardware like a LCD monitor, webcam, motherboard and software like C#.NET, Android and embedded systems. R-Bo can interact with users through voice using AIML, map environments using SLAM, recognize faces using EmguCV and be controlled remotely with an Android application. Future work includes more advanced navigation, obstacle detection and accessing social media.