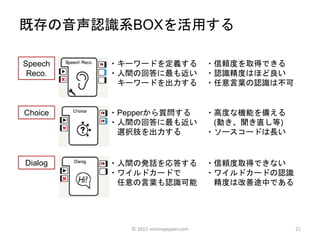
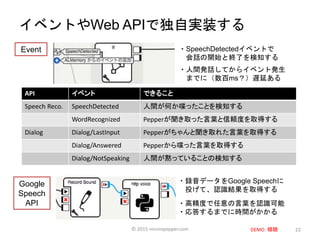
#22 Choice
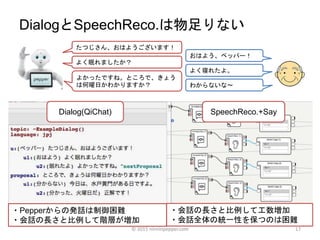
・質問から認識までの一連を簡単に実装できる
Dialog
・Pepperから質問するのは実装困難である
A Proposal rule triggers a specific robot output without any user output beforehand.
どういう条件、どういう順番でProposalを実行するか、制御は難しい
外部のモジュールの呼び出しは難しい
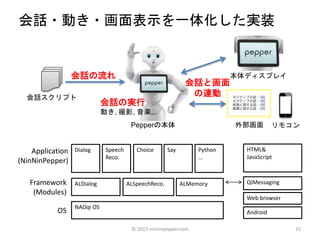
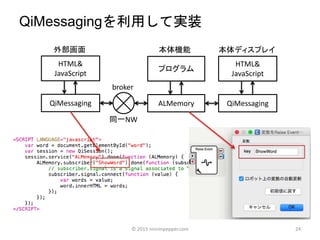
#25 Local Module : Simply use the name of the module.
Remote Module : Use the name of the module, and the IP and port of a broker.
QiMessaging : イベント駆動
QiMessagingからALMemoryだけでなく、他のmoduleも制御可能、図では一部だけを示す