Recommended
PDF
PDF
「さくらのクラウド」におけるVyattaの活用事例
PDF
KEY
PPTX
Osc2012 tokyo fall_home_san_nayamaguti
PDF
「Photon OS + Docker」VLAN 環境の構築
PDF
PDF
OpenIndiana vWire Demo (Japanese)
PDF
配布用Beginnerならきっと役立つmaster slave環境
PDF
「Docker +VLAN 環境」アプリケーション実行環境の構築
PDF
PDF
PDF
RouterBOARD with OpenFlow
PDF
“見てわかる”ファイバーチャネルSAN基礎講座(第6弾: 最終回)~困った時もこれで安心(?)、FC SANにおけるトラブルシューティングのコツとは??~
PDF
PDF
“見てわかる” ファイバーチャネルSAN基礎講座(第4弾)~続・間違わない!FC SAN導入のヒントとコツ~
PDF
ブロケード FC ファブリックスイッチ オペレーション講座(後編)
PDF
ヤフー社内でやってるMySQLチューニングセミナー大公開
PDF
FC SAN Fabric環境におけるパフォーマンストラブルの対処法
PDF
イルカさんチームからゾウさんチームに教えたいMySQLレプリケーション
KEY
PDF
“見てわかる” ファイバーチャネルSAN基礎講座(第5弾)~さあ、いよいよ、運用です!~
PDF
PDF
PDF
“見てわかる” ファイバーチャネルSAN基礎講座(第3弾)~間違わない!FC SAN導入のヒントとコツ~
PDF
PDF
PDF
PDF
IPv6冗長で差をつけよう 2011年夏の思い出作り VRRP編
PPTX
Maria X MIT presentation slides
More Related Content
PDF
PDF
「さくらのクラウド」におけるVyattaの活用事例
PDF
KEY
PPTX
Osc2012 tokyo fall_home_san_nayamaguti
PDF
「Photon OS + Docker」VLAN 環境の構築
PDF
PDF
OpenIndiana vWire Demo (Japanese)
What's hot
PDF
配布用Beginnerならきっと役立つmaster slave環境
PDF
「Docker +VLAN 環境」アプリケーション実行環境の構築
PDF
PDF
PDF
RouterBOARD with OpenFlow
PDF
“見てわかる”ファイバーチャネルSAN基礎講座(第6弾: 最終回)~困った時もこれで安心(?)、FC SANにおけるトラブルシューティングのコツとは??~
PDF
PDF
“見てわかる” ファイバーチャネルSAN基礎講座(第4弾)~続・間違わない!FC SAN導入のヒントとコツ~
PDF
ブロケード FC ファブリックスイッチ オペレーション講座(後編)
PDF
ヤフー社内でやってるMySQLチューニングセミナー大公開
PDF
FC SAN Fabric環境におけるパフォーマンストラブルの対処法
PDF
イルカさんチームからゾウさんチームに教えたいMySQLレプリケーション
KEY
PDF
“見てわかる” ファイバーチャネルSAN基礎講座(第5弾)~さあ、いよいよ、運用です!~
PDF
PDF
PDF
“見てわかる” ファイバーチャネルSAN基礎講座(第3弾)~間違わない!FC SAN導入のヒントとコツ~
PDF
PDF
PDF
Viewers also liked
PDF
IPv6冗長で差をつけよう 2011年夏の思い出作り VRRP編
PPTX
Maria X MIT presentation slides
PPTX
PPTX
Sara portfolio april 2011 cput 2nd yr
PDF
It fin analyse_slideshare_20110915
PDF
超簡単!? Punycode 変換 �~国際化・日本語ドメイン~
PDF
DNS64 (El capitan and unbound-1.5.1)
PDF
raspi + soracom #pakeana33
PPTX
PDF
how to defend DNS authoritative server against DNS WaterTorture
PPTX
PDF
PDF
PDF
a little more about CaptureFilter
PDF
Data Integrity Techniques: Aviation Best Practices for CRC & Checksum Error D...
PPS
Poor Rich (Poor Rich.Pps)
PDF
パケットが教えてくれた ルートサーバが 13個の理由
Similar to Packet と向き合う夏 VRRP Advertisement編
PDF
PPTX
PDF
PDF
「個人でも手軽に引ける回線を使って、快適なMy Home Networkを作ったお話」「SEILちゃんを使った、お手軽・しっかりなリモートアクセス(RAS...
PDF
PDF
Scapy presentation Remake(訂正)
PDF
Wiresharkで検出できないチャットプログラム
PDF
PDF
Technical report for IPv6 Routing w/ bgp4+ (part2)
PDF
PDF
PDF
More from @ otsuka752
PPTX
NS & NSID of Amazon Route 53
PPTX
PPTX
OLD_Lt traffic analyse_OLD
PPTX
PDF
PDF
reusable delegation set のススメ (Route53)
PDF
PDF
PDF
how to decrypt SSL/TLS without PrivateKey of servers
PDF
PDF
Measurement of� Maximum new NAT-sessions�per second / How to send packets
PDF
毎日 dig ったら分かったこと ~新 gTLD~
PDF
PDF
PDF
PDF
PDF
PDF
IPv6冗長で差をつけよう 2011年夏の思い出作り HSRP編
Packet と向き合う夏 VRRP Advertisement編 1. @twovs
Packet と向き合う夏
VRRP Advertisement編
第5回ネットワークパケットを読む会
2011/07/26 Tue #pakeana
2. @twovs
agenda
about me
VRRP(ver.2)
基本構成
Advertisement パケット
問題点
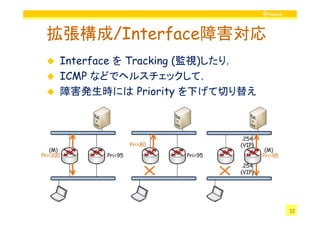
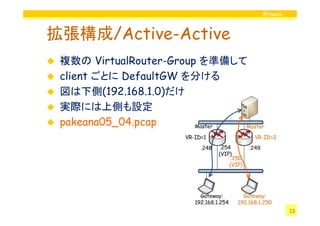
拡張構成
Interface 障害
Active-Active 構成
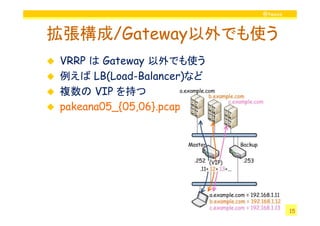
Gateway 以外でも使う
VRRP(ver.3)
パケットを読んでトラブルシュート
2
3. 4. 5. @twovs
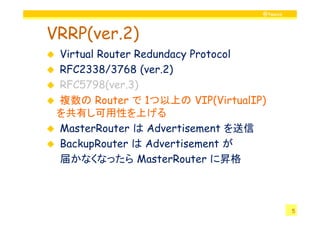
VRRP(ver.2)
Virtual Router Redundacy Protocol
RFC2338/3768 (ver.2)
RFC5798(ver.3)
複数の Router で 1つ以上の VIP(VirtualIP)
を共有し可用性を上げる
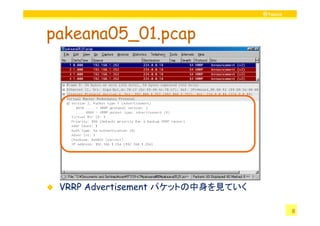
MasterRouter は Advertisement を送信
BackupRouter は Advertisement が
届かなくなったら MasterRouter に昇格
5
6. @twovs
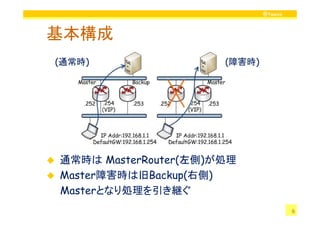
基本構成
(通常時) (障害時)
通常時は MasterRouter(左側)が処理
Master障害時は旧Backup(右側)
Masterとなり処理を引き継ぐ
6
7. 8. 9. 10. 11. @twovs
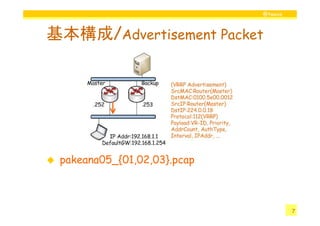
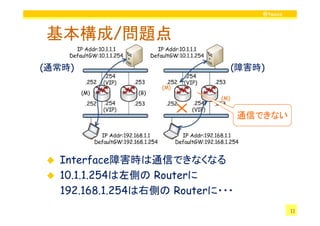
基本構成/問題点
(通常時) (障害時)
通信できない
Interface障害時は通信できなくなる
10.1.1.254は左側の Routerに
192.168.1.254は右側の Routerに・・・
11
12. 13. 14. 15. 16. 17. 18. @twovs
VRRP(ver.3)
RFC5798(ver.3)
IPv6 対応
IPv6 は link-local(fe80::/64)から Ad を送信
FirstAddr(1
FirstAddr(1つめの VIP)は link-local Addr
VIP)
VR-ID と Prioriy は ver.2 と同じ
Ad の Interval は短くできる/高速 fail-over
IPv6 対応だけ押さえれば OK ???
pakeana05_{07,08,09}.pcap
18
19. 20. 21. 22. 23. @twovs
備考:キャプチャデータの一覧
No. filename VR- ver. VR- prio Addr- IP Addr auth interval
Group ID Count type [s]
1 pakeana05_01 1 2 1 100 1 192.168.1.254 none 1
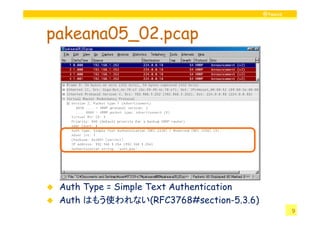
2 pakeana05_02 1 2 1 100 1 192.168.1.254 PASS 1
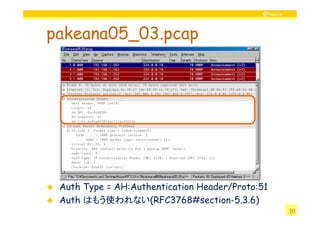
3 pakeana05_03 1 2 1 100 1 192.168.1.254 AH 1
11 100+90 192.168.1.254
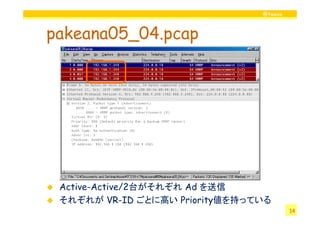
4 pakeana05_04 2 2 1 none 1
12 90+100 192.168.1.250
192.168.1.254
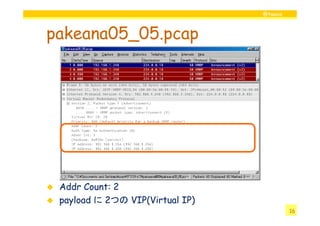
5 pakeana05_05 1 2 20 100 2 none 1
192.168.1.250
10.x.y.z
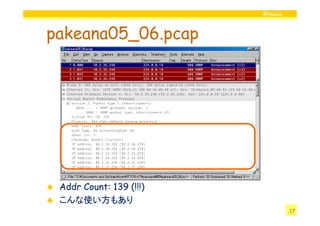
6 pakeana05_06 1 2 255 104 139 none 1
…
7 pakeana05_07 1 3 30 100 1 192.168.1.254 none 0.2
8 pakeana05_08 1 3 30 100 1 fe80::3333:fe none 0.5
fe80::3333:fe
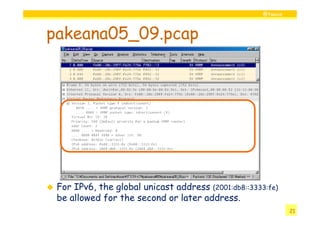
9 pakeana05_09 1 3 30 100 2 none 0.9
2001:db8::3333:fe
10 pakeana05_10
23
24. @twovs
備考:サンプルデータを取得した人達
keepalived
オープンソースでの VRRP の実装の 1つ
keepalived-1.2.2
http://keepalived.org/
SEIL(ざいる)
IIJが開発・販売するルータ
SEIL/x86 Fuji 1.8.0
http://seil.jp/
LoadBalancer
…
24
25. 26. @twovs
-END-
Thank you, see you again!
26

![@twovs
pakeana05_07.pcap
VRRP(ver.3)
Ad Intervarl: 20[centisec] = 200[msec] = 0.2[s]
19](https://image.slidesharecdn.com/pakeana0520110717-110726052428-phpapp02/85/Packet-VRRP-Advertisement-19-320.jpg)
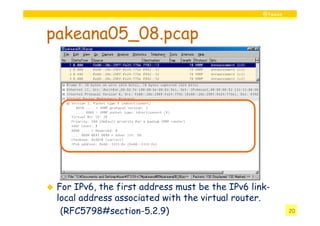
![@twovs
備考:キャプチャデータの一覧
No. filename VR- ver. VR- prio Addr- IP Addr auth interval
Group ID Count type [s]
1 pakeana05_01 1 2 1 100 1 192.168.1.254 none 1
2 pakeana05_02 1 2 1 100 1 192.168.1.254 PASS 1
3 pakeana05_03 1 2 1 100 1 192.168.1.254 AH 1
11 100+90 192.168.1.254
4 pakeana05_04 2 2 1 none 1
12 90+100 192.168.1.250
192.168.1.254
5 pakeana05_05 1 2 20 100 2 none 1
192.168.1.250
10.x.y.z
6 pakeana05_06 1 2 255 104 139 none 1
…
7 pakeana05_07 1 3 30 100 1 192.168.1.254 none 0.2
8 pakeana05_08 1 3 30 100 1 fe80::3333:fe none 0.5
fe80::3333:fe
9 pakeana05_09 1 3 30 100 2 none 0.9
2001:db8::3333:fe
10 pakeana05_10
23](https://image.slidesharecdn.com/pakeana0520110717-110726052428-phpapp02/85/Packet-VRRP-Advertisement-23-320.jpg)