Download as PDF, PPTX



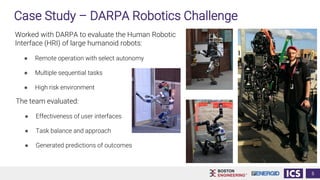





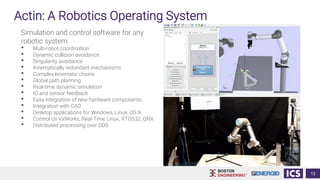












The document discusses optimizing usability and human-robot interaction in medical robotics. It includes presentations from David Shane of Boston Engineering, Daniel Melanz of Energid Technologies, and Dorothy Shamonsky of ICS. Shane discusses Boston Engineering's work evaluating human-robot interfaces for DARPA. Melanz describes Energid's robotics software Actin, which provides simulation, control and coordination of complex robotic systems. Shamonsky emphasizes the importance of user experience design and outlines best practices for working with users to understand requirements and test prototypes. The overall document focuses on challenges in developing intuitive interfaces for emerging medical robotics.







![[Webinar] Automotive Media Management in Future IVI Systems](https://cdn.slidesharecdn.com/ss_thumbnails/automotivemediamanagementinfutureivisystems3-170428151850-thumbnail.jpg?width=640&height=640&fit=bounds)















![Final presentation [dissertation project], 20192 esv0002](https://cdn.slidesharecdn.com/ss_thumbnails/finalpresentationdissertationproject20192esv0002-210613151713-thumbnail.jpg?width=640&height=640&fit=bounds)