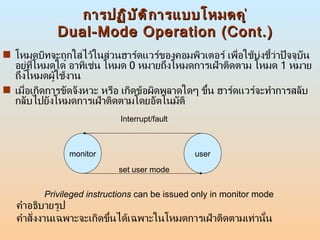
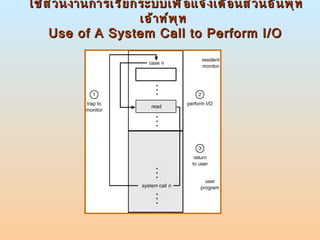
การปฏิบัติการแบบโหมดคู่ Dual-Mode Operation(Cont.) โหมดบิทจะถูกใส่ไว้ในส่วนฮาร์ดแวร์ของคอมพิวเตอร์ เพื่อใช้บ่งชี้ว่าปัจจุบันอยู่ที่โหมดใด อาทิเช่น โหมด 0 หมายถึงโหมดการเฝ้าติดตาม โหมด 1 หมายถึงโหมดผู้ใช้งาน เมื่อเกิดการขัดจังหวะ หรือ เกิดข้อผิดพลาดใดๆ ขึ้น ฮาร์ดแวร์จะทำการสลับกลับไปยังโหมดการเฝ้าติดตามโดยอัตโนมัติ Privileged instructions can be issued only in monitor mode monitor user Interrupt/fault set user mode คำอธิบายรูป คำสั่งงานเฉพาะจะเกิดขึ้นได้เฉพาะในโหมดการเฝ้าติดตามเท่านั้น