Download as PDF, PPTX

![LEADING COLLABORATION
IN THE ARM ECOSYSTEM
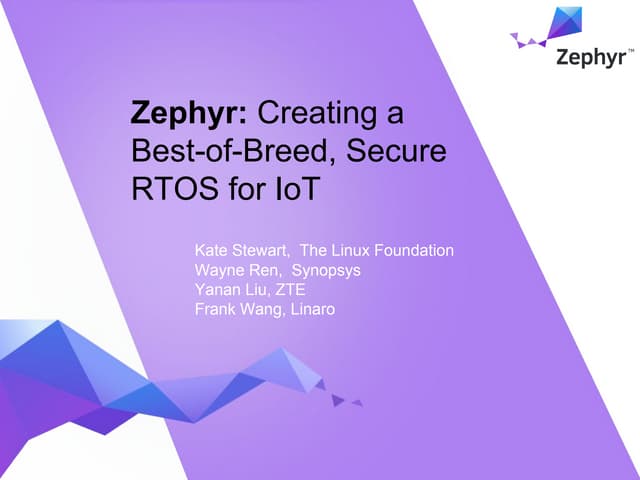
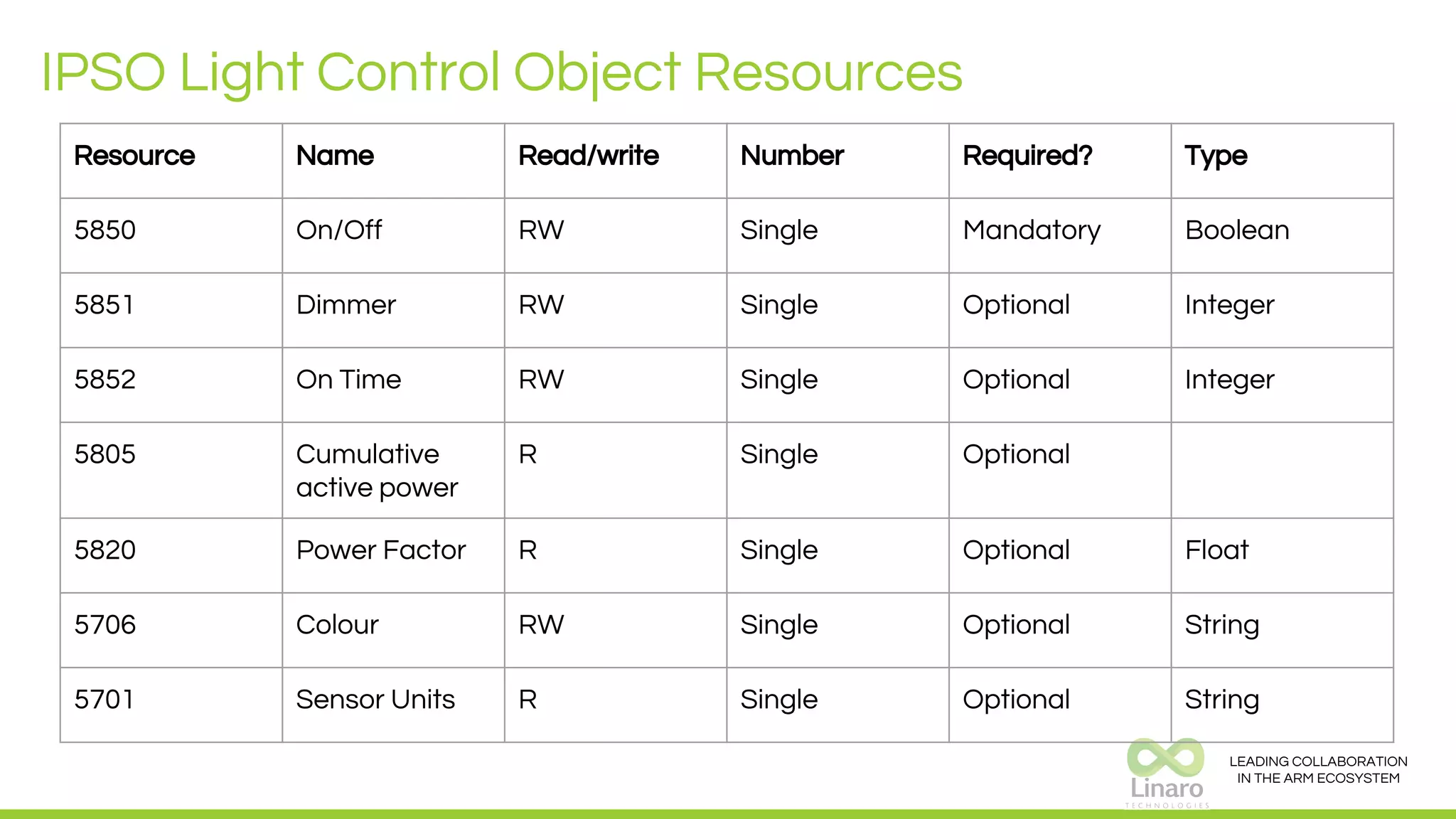
LWM2M from 10,000 ft (3048 m)
UDP, L2, PHY
CoAP [+DTLS]
LWM2M
IPSO objects
Application callbacks, etc.](https://image.slidesharecdn.com/sfo17-113newzephyrfeatureslwm2m2ffotaframeworksfo17-171011100942/75/New-Zephyr-features-LWM2M-FOTA-Framework-SFO17-113-13-2048.jpg)
![LEADING COLLABORATION
IN THE ARM ECOSYSTEM
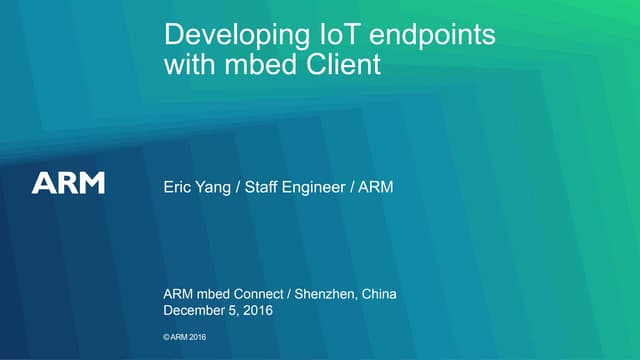
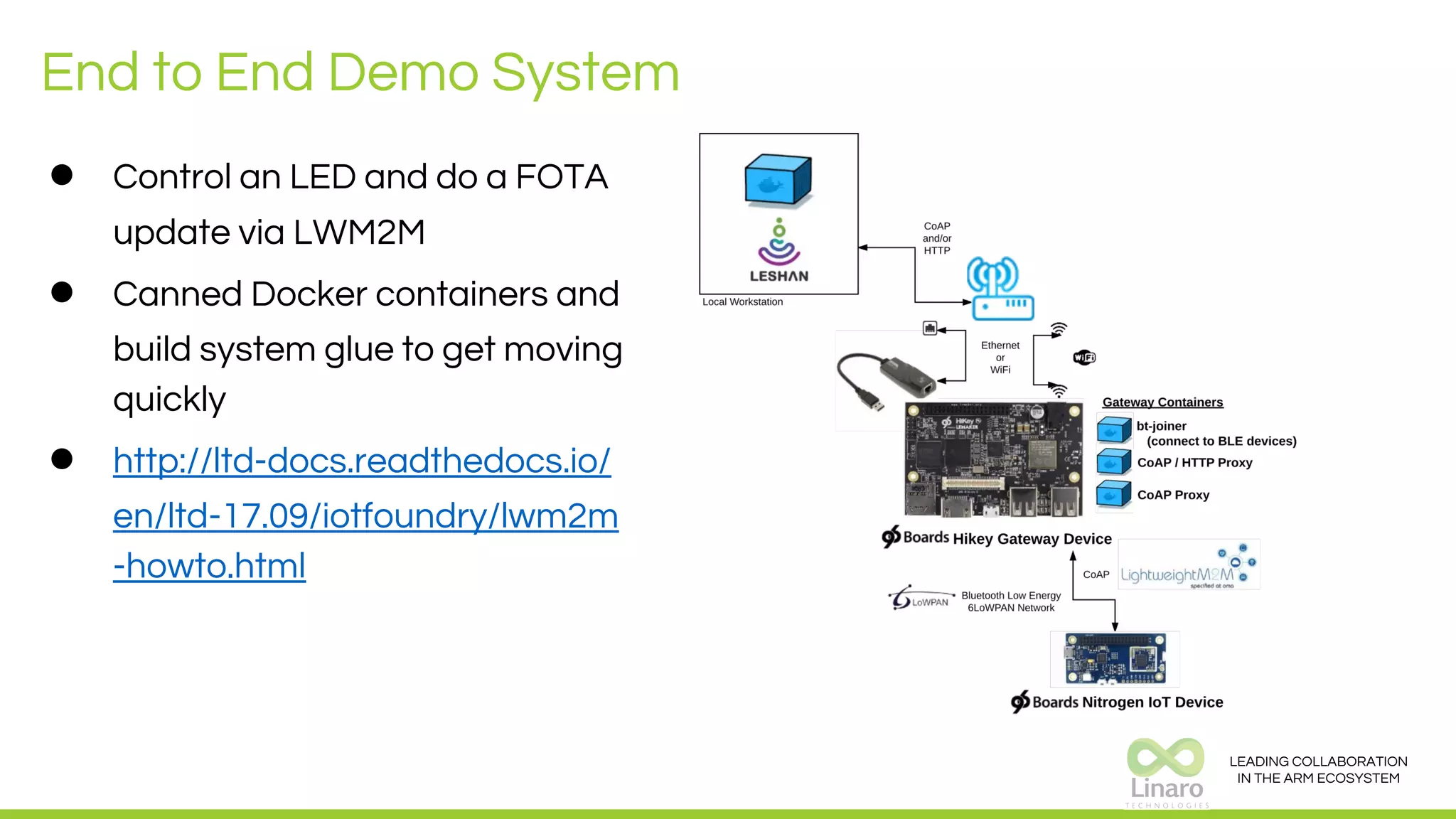
IPSO Light Control in Source Form
static struct lwm2m_engine_obj_field fields[] = {
OBJ_FIELD_DATA(LIGHT_ON_OFF_ID, RW, BOOL),
OBJ_FIELD_DATA(LIGHT_DIMMER_ID, RW, U8),
OBJ_FIELD_DATA(LIGHT_ON_TIME_ID, RW, S32),
OBJ_FIELD_DATA(LIGHT_CUMULATIVE_ACTIVE_POWER_ID, R,
FLOAT32),
OBJ_FIELD_DATA(LIGHT_POWER_FACTOR_ID, R, FLOAT32),
OBJ_FIELD_DATA(LIGHT_COLOUR_ID, RW, STRING),
OBJ_FIELD_DATA(LIGHT_SENSOR_UNITS_ID, R, STRING),
};](https://image.slidesharecdn.com/sfo17-113newzephyrfeatureslwm2m2ffotaframeworksfo17-171011100942/75/New-Zephyr-features-LWM2M-FOTA-Framework-SFO17-113-16-2048.jpg)
![LEADING COLLABORATION
IN THE ARM ECOSYSTEM
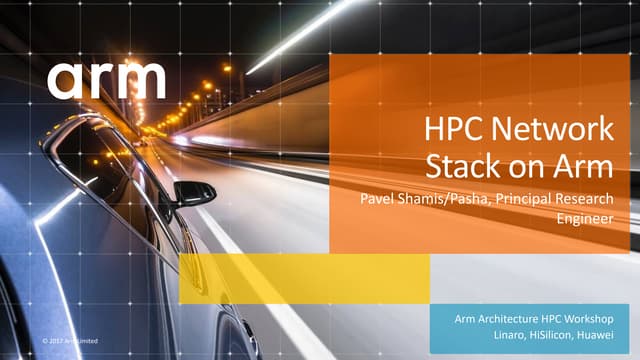
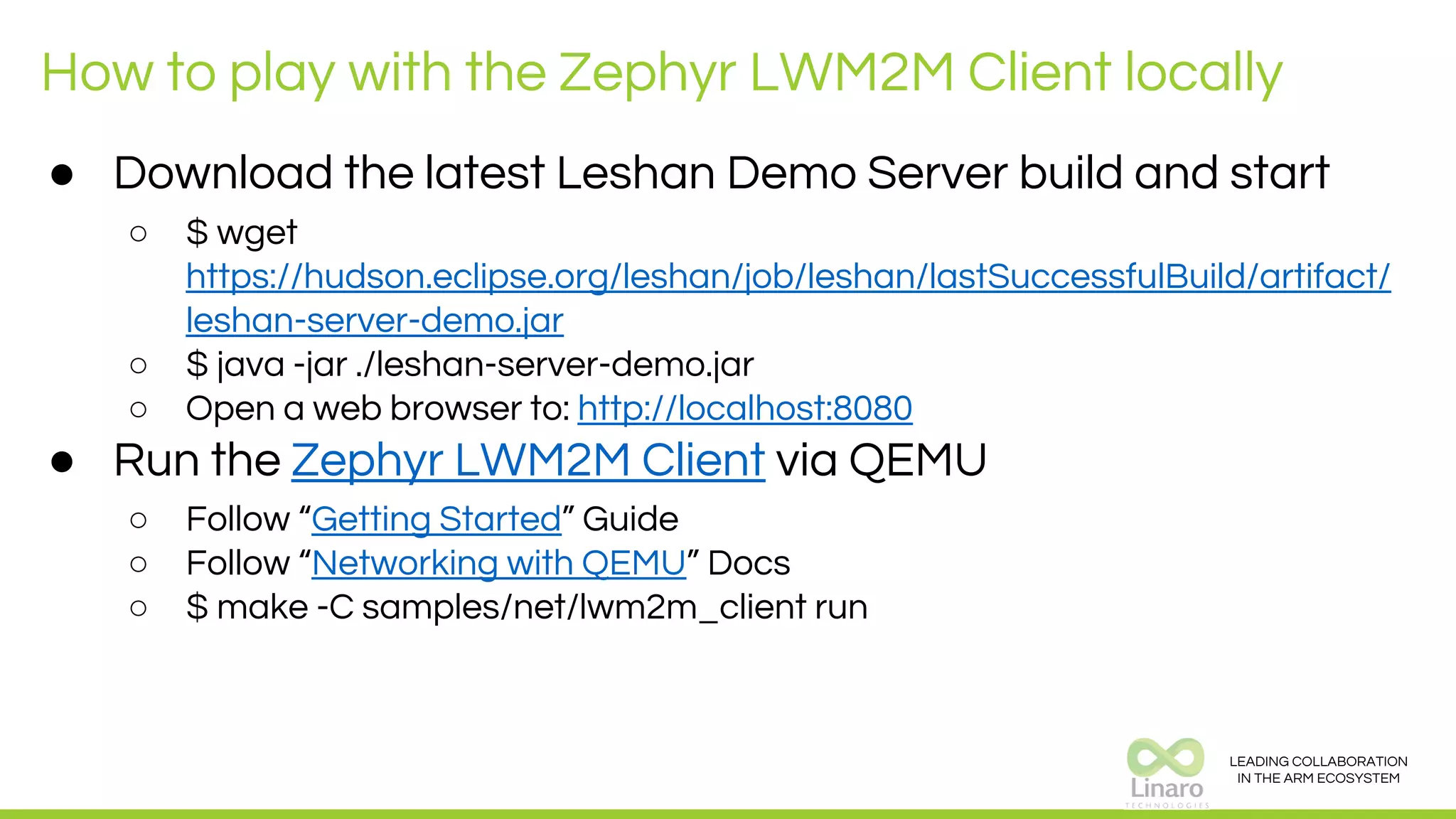
Instance-specific data declarations
/* Initialize instance resource data. */
INIT_OBJ_RES_DATA(res[avail], i, LIGHT_ON_OFF_ID,
&on_off_value[avail], sizeof(*on_off_value));
INIT_OBJ_RES_DATA(res[avail], i, LIGHT_DIMMER_ID,
&dimmer_value[avail], sizeof(*dimmer_value));
[...]
INIT_OBJ_RES_DATA(res[avail], i, LIGHT_SENSOR_UNITS_ID,
units[avail], LIGHT_STRING_SHORT);](https://image.slidesharecdn.com/sfo17-113newzephyrfeatureslwm2m2ffotaframeworksfo17-171011100942/75/New-Zephyr-features-LWM2M-FOTA-Framework-SFO17-113-17-2048.jpg)
![LEADING COLLABORATION
IN THE ARM ECOSYSTEM
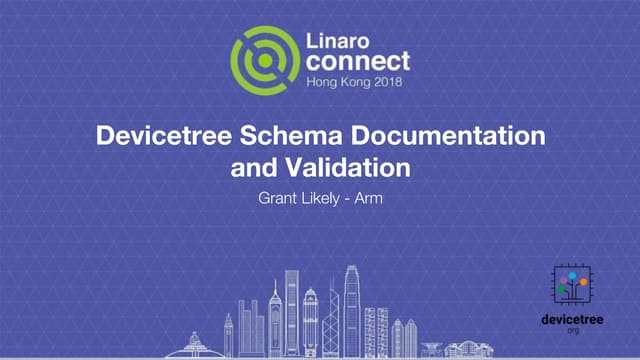
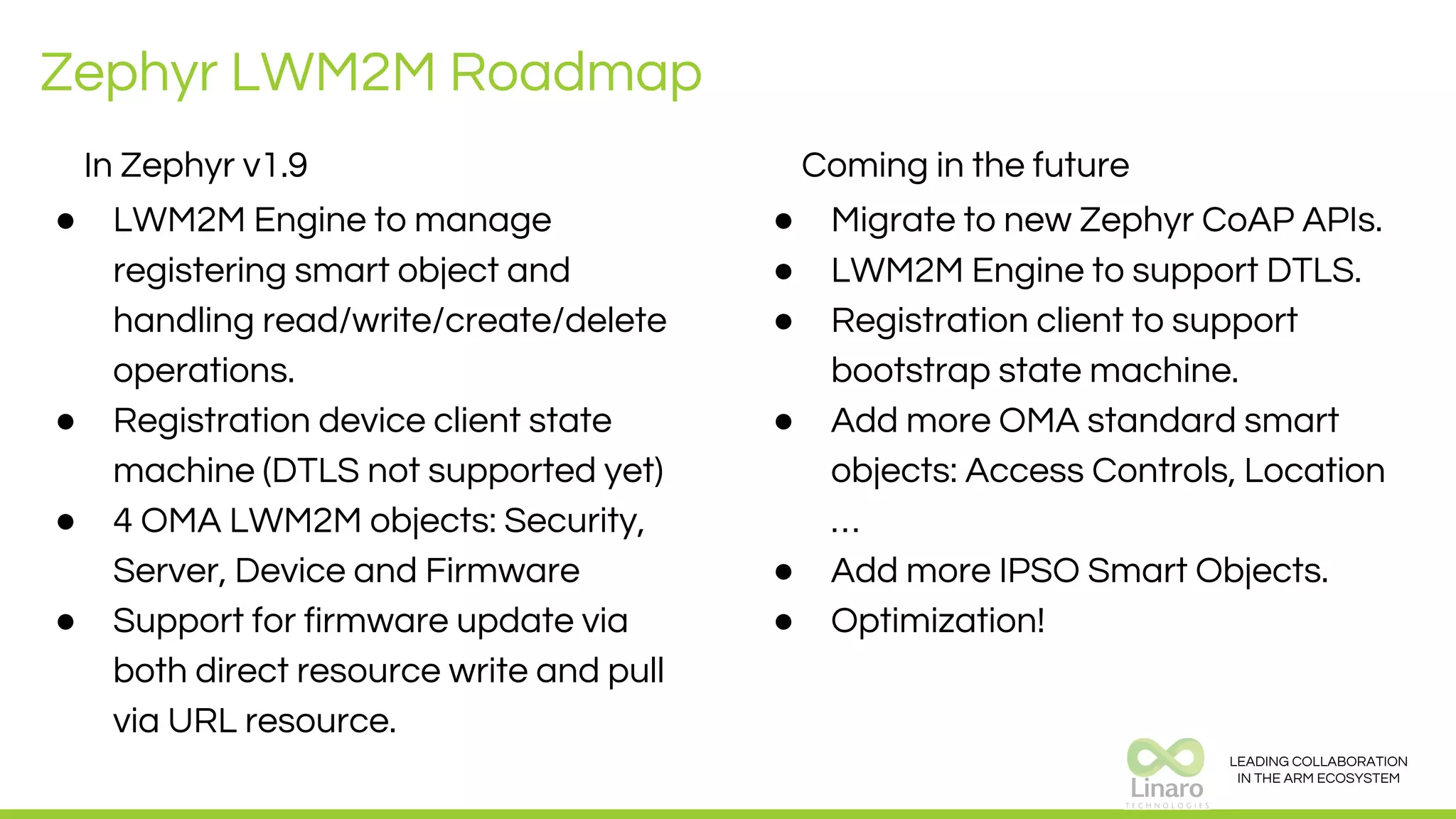
Application level
/* Resource initialization */
lwm2m_engine_set_string("3/0/0", CLIENT_MANUFACTURER);
lwm2m_engine_set_string("3/0/1", CLIENT_MODEL_NUMBER);
[...]
/* Engine startup */
ret = lwm2m_rd_client_start(&client, CONFIG_NET_APP_PEER_IPV6_ADDR,
CONFIG_LWM2M_PEER_PORT, CONFIG_BOARD,
rd_client_event);](https://image.slidesharecdn.com/sfo17-113newzephyrfeatureslwm2m2ffotaframeworksfo17-171011100942/75/New-Zephyr-features-LWM2M-FOTA-Framework-SFO17-113-18-2048.jpg)

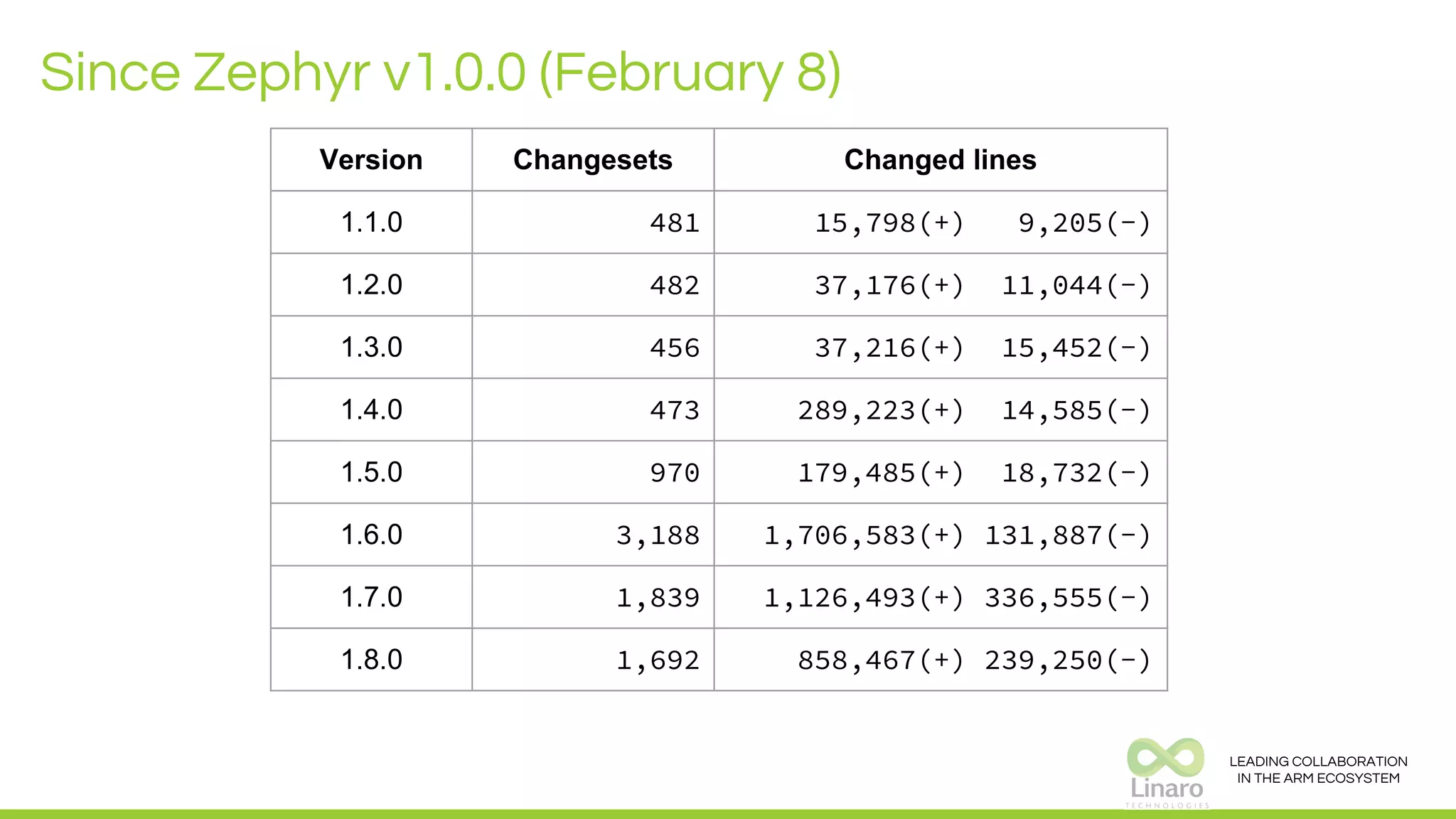
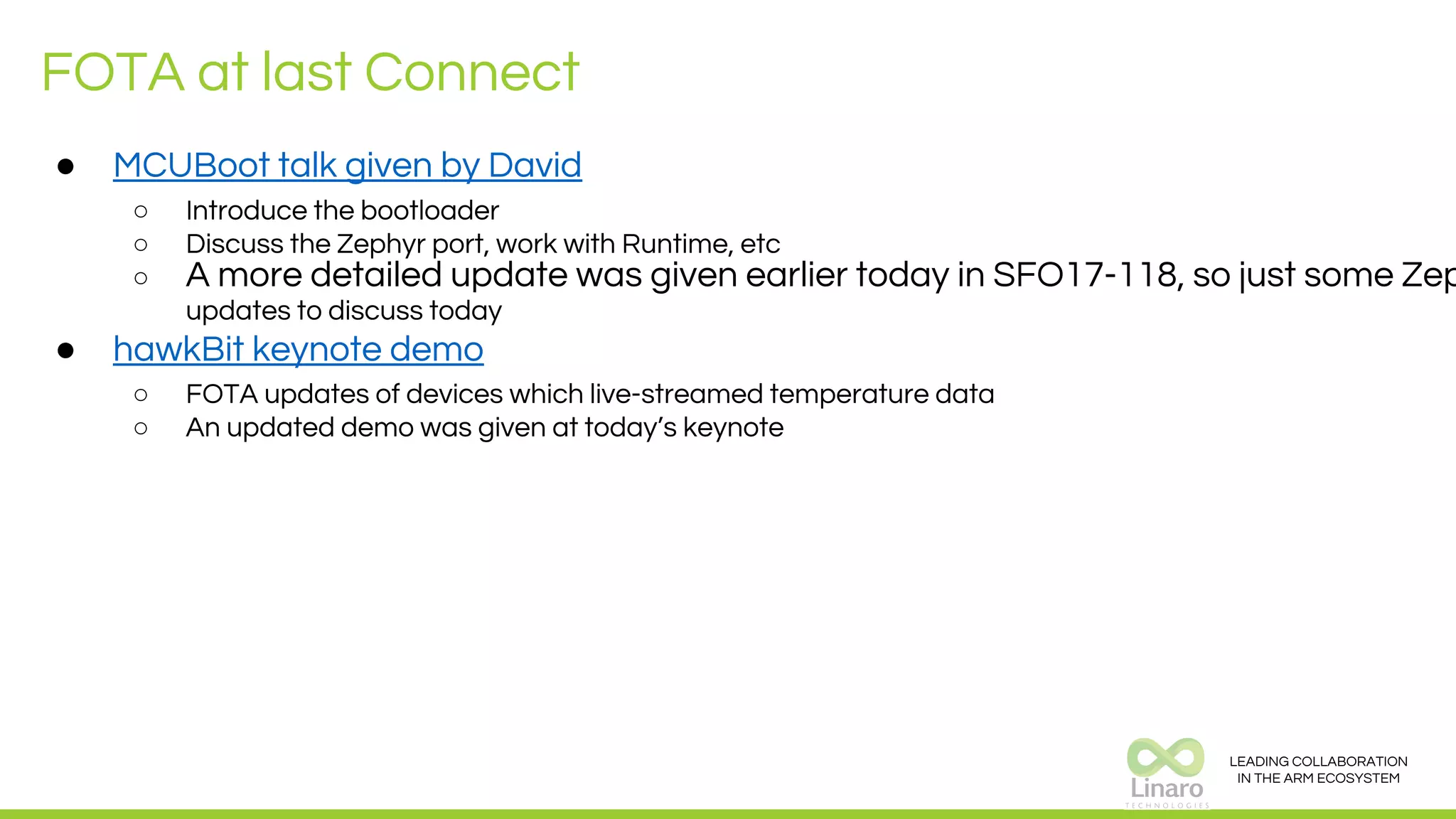
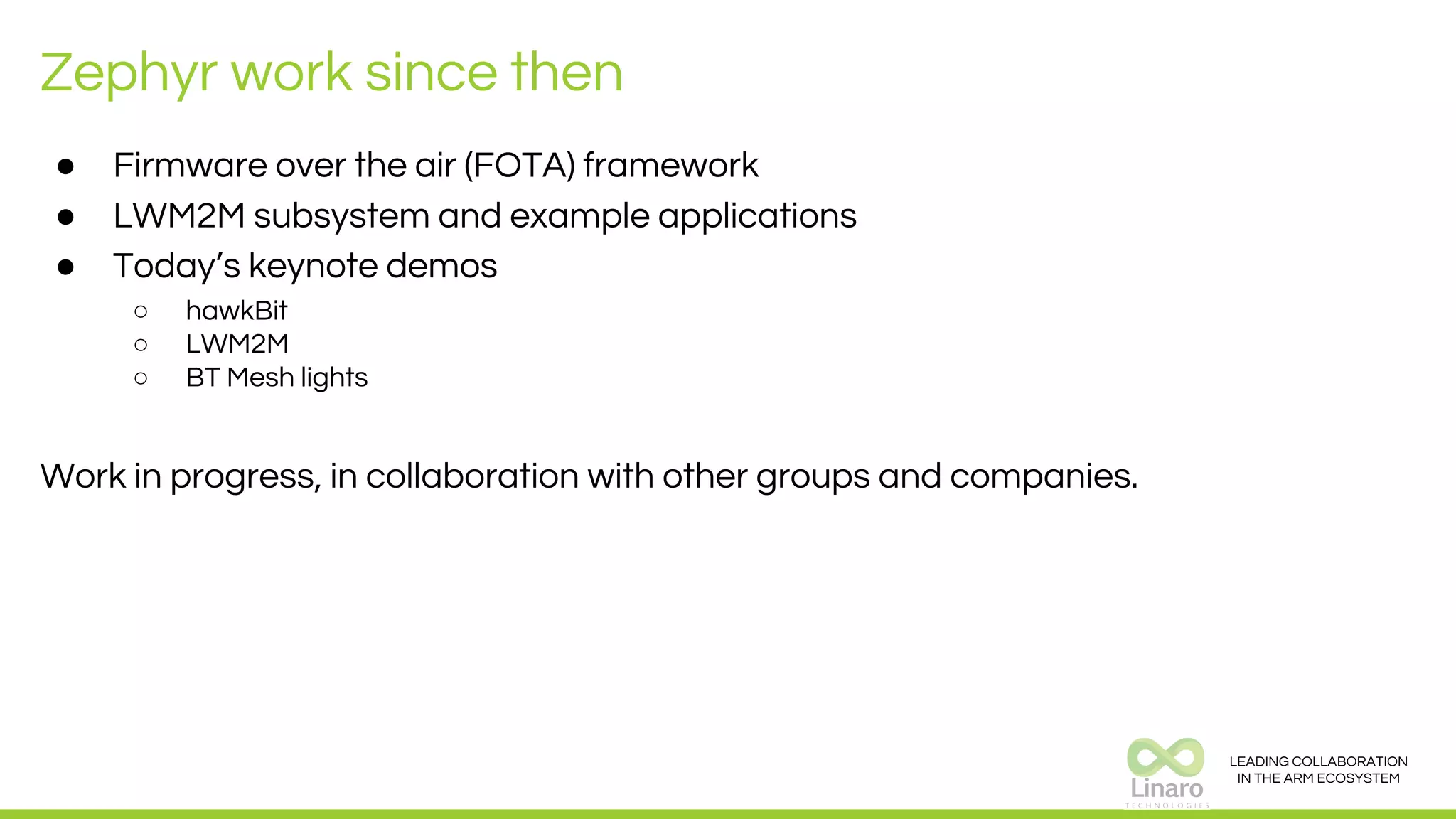
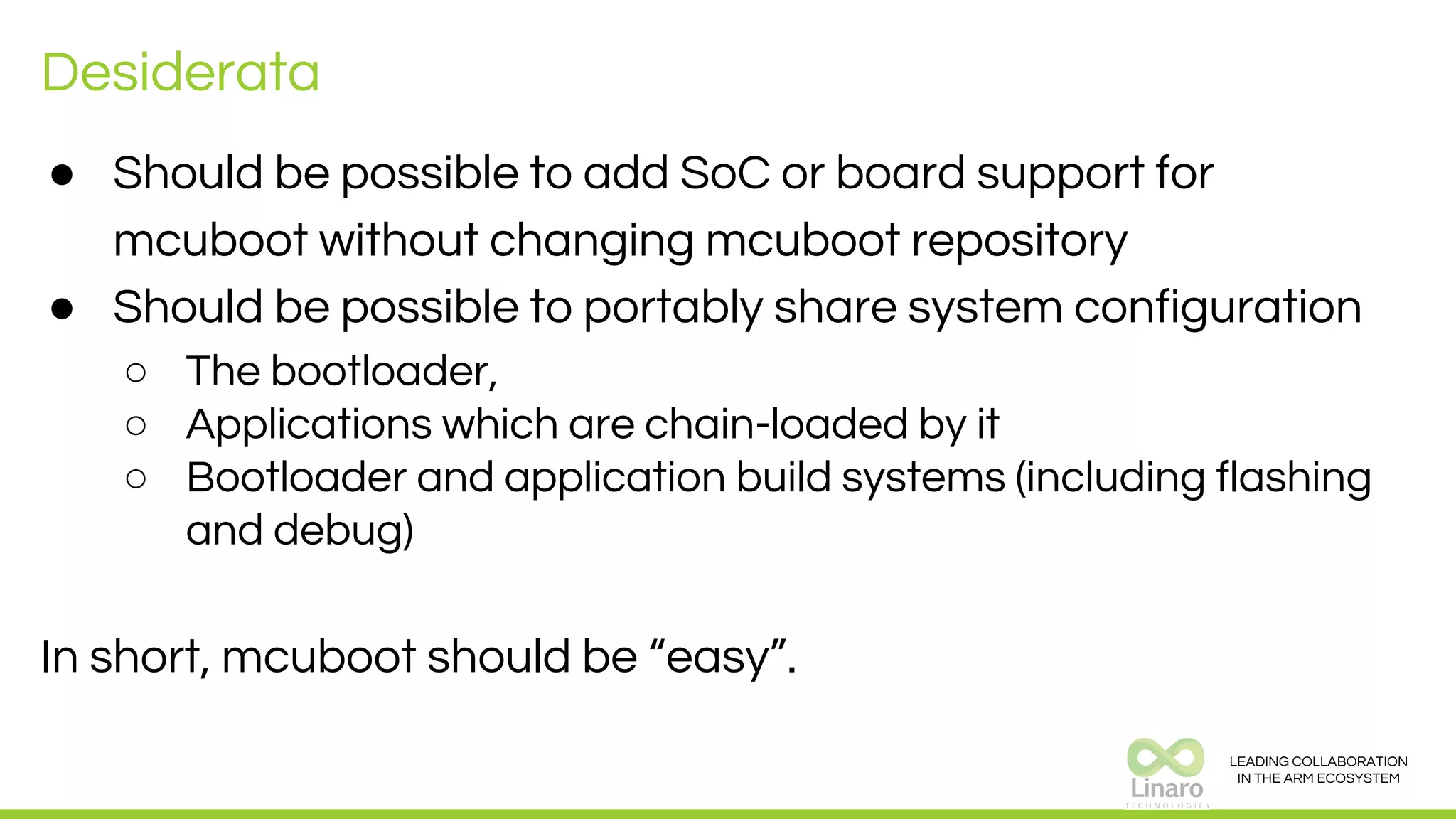
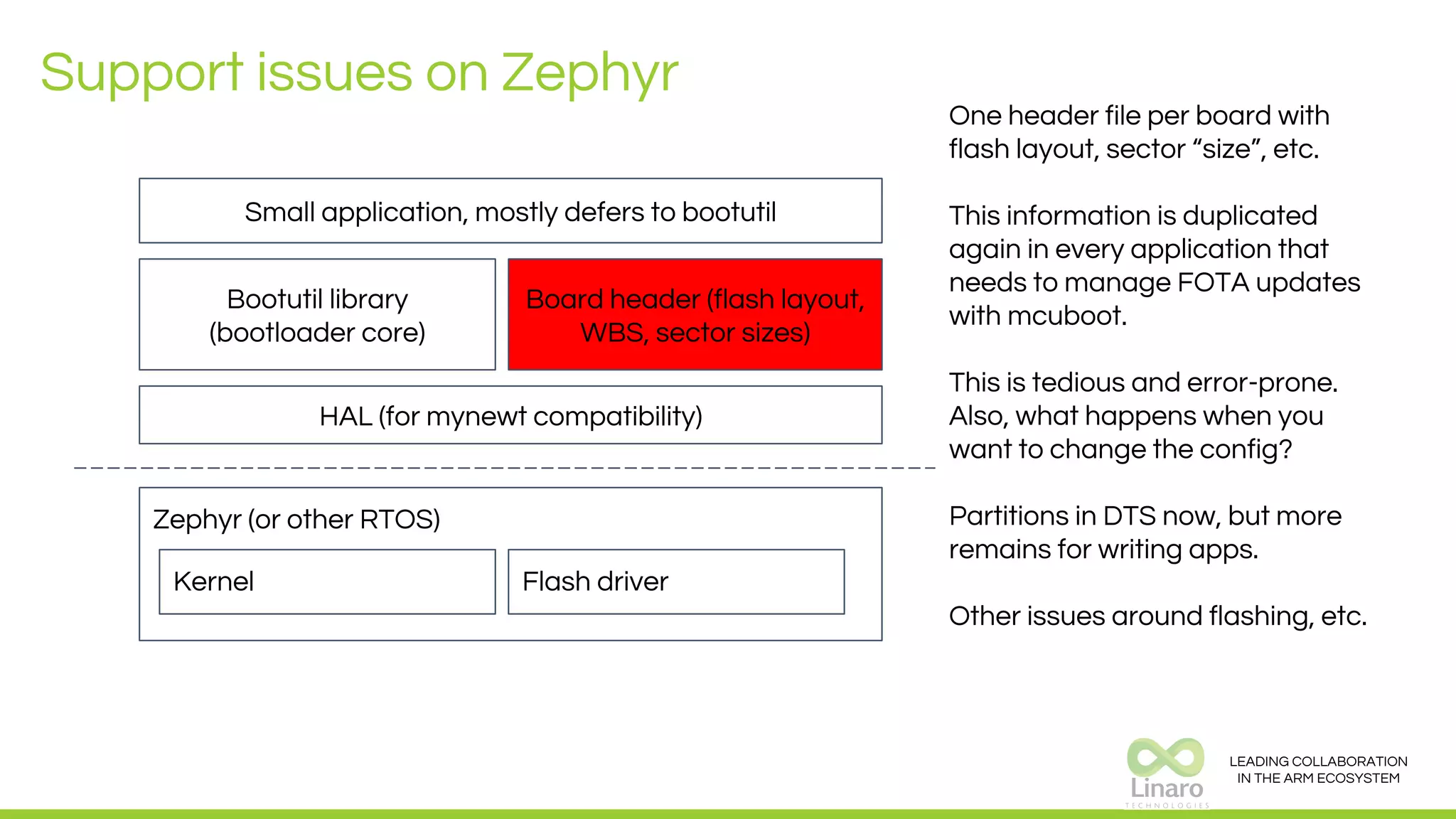
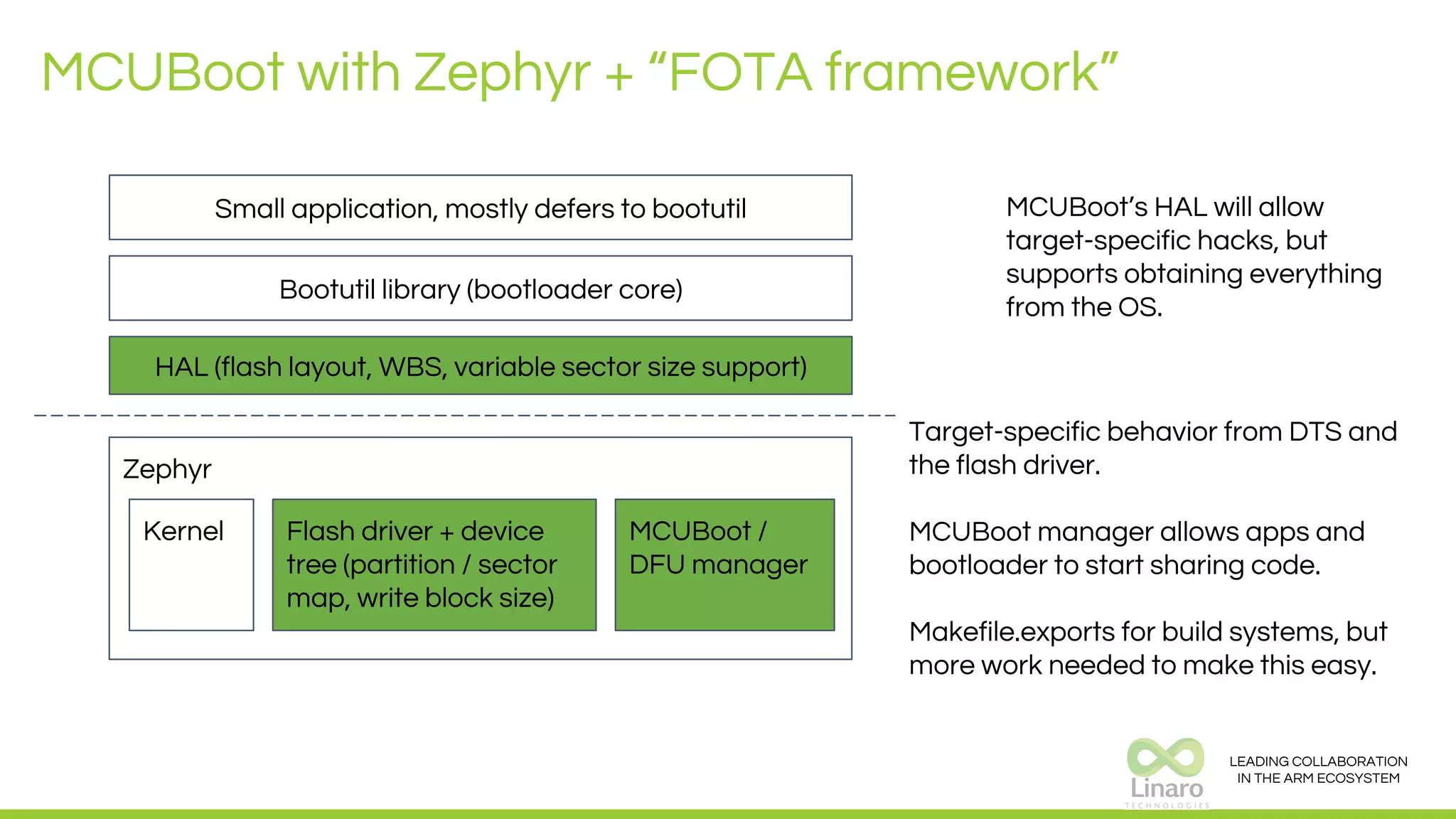
The document outlines recent developments in the Zephyr project, including firmware over-the-air (FOTA) updates and integration with the MCUBoot bootloader. It details enhancements to the LwM2M subsystem, including standardized object management and application features, aimed at enhancing interoperability. Future plans involve expanding LwM2M capabilities, including support for new object types and optimizations.