Download as PDF, PPTX


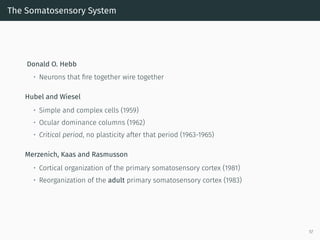
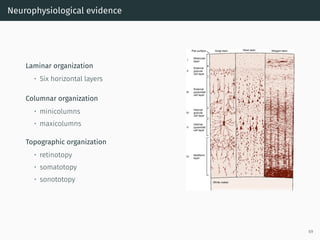
![What really matters for cognition ?
Some figures
• C.Elegans → 302 neurons
• Mouse → 71,000,000 neurons
• Rat → 200,000,000 neurons
• Macaque → 6,376,000,000 neurons
• Human → 86,000,000,000 neurons
The human brain in numbers [...], S. Herculano-Houzel,
Frontier in Human Neuroscience, 2009
6](https://image.slidesharecdn.com/talk-190405095541/85/Neural-fields-a-cognitive-approach-7-320.jpg)
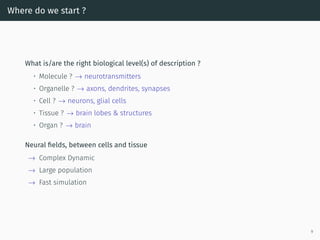
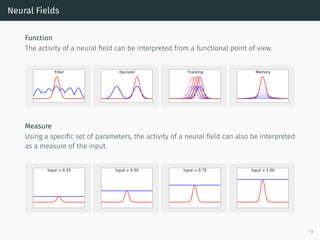

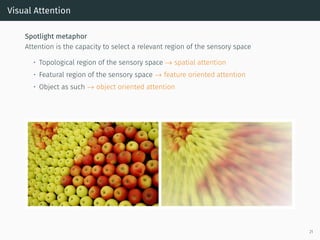
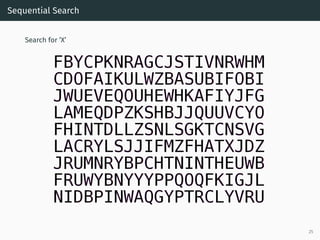
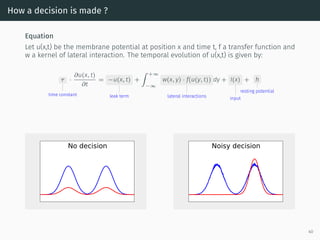
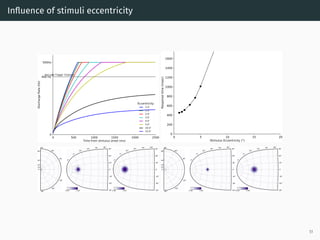
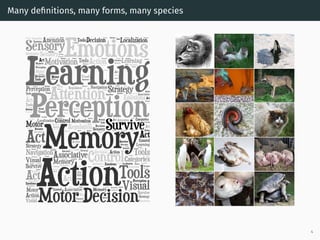
![Decision
20 30 40 50 60 70 80
Relative distance between targets [°]
0.4
0.3
0.2
0.1
0.0
0.1
0.2
0.3
0.4
Normalizedyposition
A
B
0°
10°
20°
40°
80°
-90°
-60°
-30°
30°
60°
90°
2°
5°
10°
20° 40° 80°
-90°
-60°
-30°
0°
30°
60°
90°
2°
5°
10°
20° 40° 80°
-90°
-60°
-30°
0°
30°
60°
90°
0.00 1.00 0.00 0.55
0°
10°
20°
40°
80°
-90°
-60°
-30°
30°
60°
90°
2°
5°
10°
20° 40° 80°
-90°
-60°
-30°
0°
30°
60°
90°
2°
5°
10°
20° 40° 80°
-90°
-60°
-30°
0°
30°
60°
90°
0.00 1.00 0.00 0.61
52](https://image.slidesharecdn.com/talk-190405095541/85/Neural-fields-a-cognitive-approach-55-320.jpg)
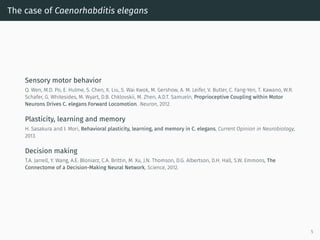
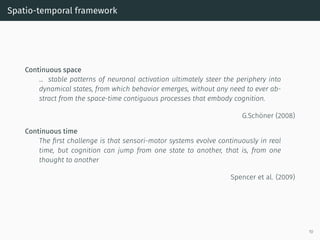
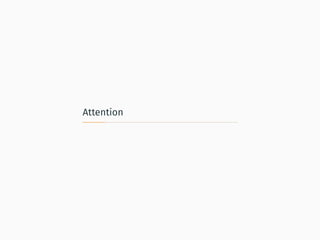
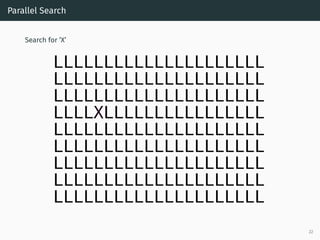
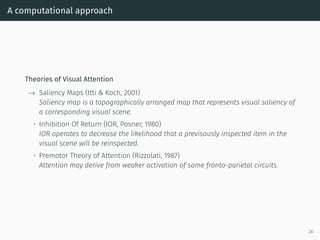
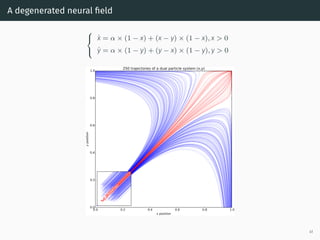
![Dynamics
0°
10°
20°
40°
80°
-90°
-60°
-30°
30°
60°
90°
2°
5°
10°
20° 40° 80°
-90°
-60°
-30°
0°
30°
60°
90°
2°
5°
10°
20° 40° 80°
-90°
-60°
-30°
0°
30°
60°
90°
0.00 1.00 0.00 0.60
0°
10°
20°
40°
80°
-90°
-60°
-30°
30°
60°
90°
2°
5°
10°
20° 40° 80°
-90°
-60°
-30°
0°
30°
60°
90°
2°
5°
10°
20° 40° 80°
-90°
-60°
-30°
0°
30°
60°
90°
0.00 1.00 0.00 0.61
Azimuth [°]
50
0
50
Time [ms]
0
50
100
150
200
250
Dischargerate[Hz]
0
100
200
300
400
500
Azimuth [°]
50
0
50
Time [ms]
0
50
100
150
200
250
Dischargerate[Hz]
0
100
200
300
400
500
53](https://image.slidesharecdn.com/talk-190405095541/85/Neural-fields-a-cognitive-approach-56-320.jpg)
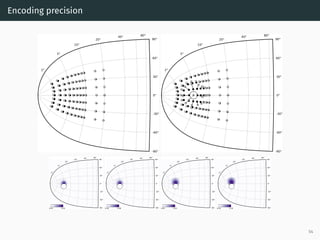

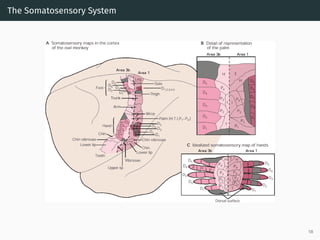
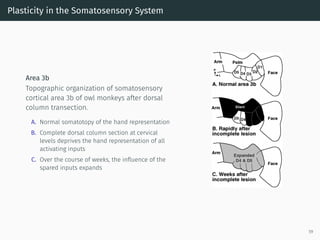
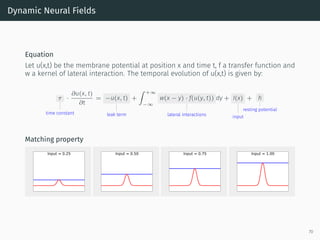
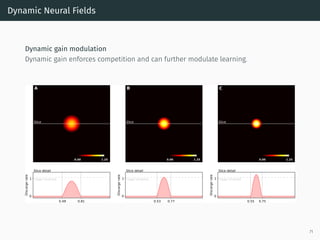
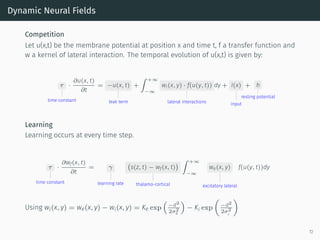
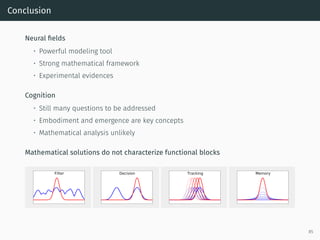
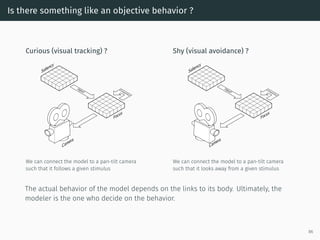


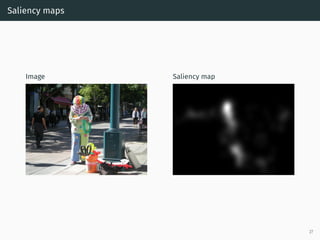
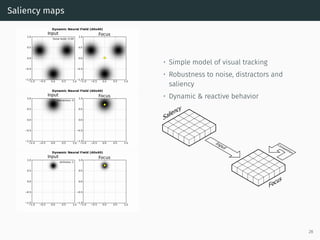
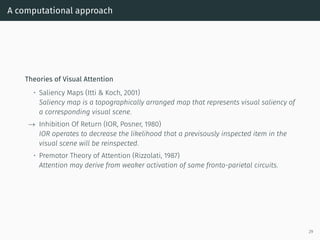
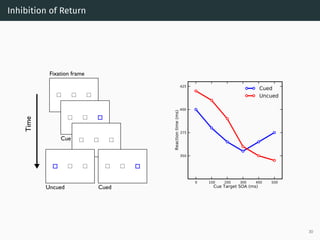
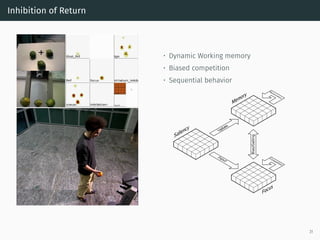
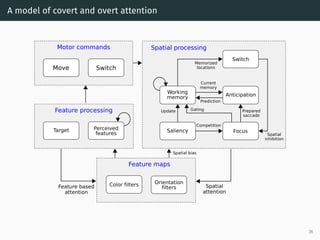
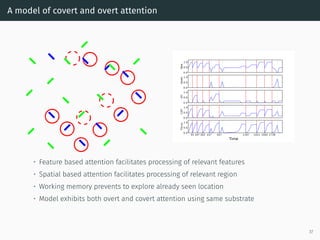
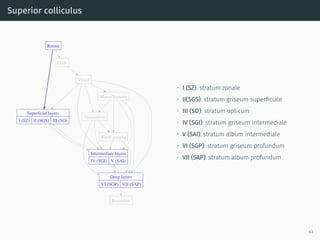
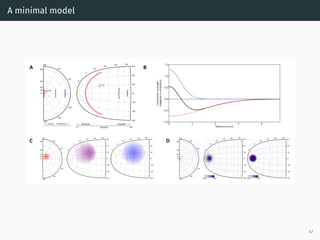
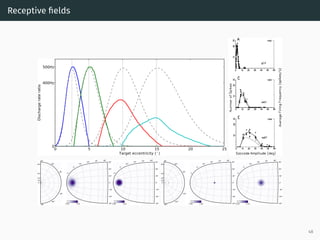
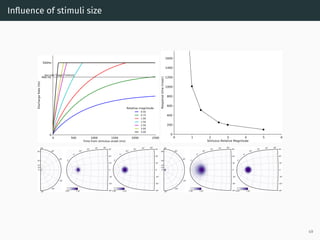
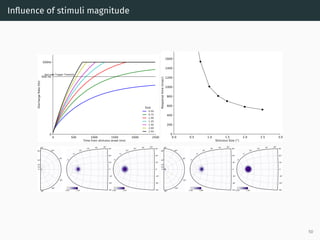
Neural fields, a cognitive approach - Neural fields model complex cognitive and behavioral functions as emerging from adaptive sensorimotor loops involving the external world, body, and brain (1 sentence) - The model studies visual attention through mechanisms like saliency maps, inhibition of return, and the premotor theory of attention using neural fields (1 sentence) - Decision making in the model is studied through the dynamics of neural fields modeling structures like the superior colliculus that encode saccade plans and make decisions about eye movement targets (1 sentence)