The document provides an overview of various mathematical concepts including functions, differentiation, polynomial and trigonometric functions, and their graphical representations. It includes examples and definitions related to slopes, derivatives, and critical points, as well as transformation between degrees and radians. Additionally, it covers exponential and logarithmic functions along with rules for their differentiation and properties.

![𝑦 = cos 𝑥2
𝑑𝑦
𝑑𝑥
=
𝑑
𝑑𝑥
cos 𝑥2
= −sin 𝑥2
∙ 2𝑥
⇒
𝑑2
𝑦
𝑑𝑥2
= −2 sin 𝑥2
∙
𝑑
𝑑𝑥
𝑥 + 𝑥.
𝑑
𝑑𝑥
sin 𝑥2
⇒
𝑑2
𝑦
𝑑𝑥2
= −2 sin 𝑥2
∙ 1 + cos 𝑥2
∙ 2𝑥 ∙ 𝑥
⇒
𝑑𝑦
𝑑𝑥
= −2𝑥 sin 𝑥2
⇒
𝑑2
𝑦
𝑑𝑥2
= −4𝑥2
cos 𝑥2
− 2 sin 𝑥2
Successive or Double Differentiation
𝑦 = cos 𝑥2
𝑑𝑦
𝑑𝑥
=
𝑑
𝑑𝑥
cos 𝑥2
= −2𝑥 sin 𝑥2
𝑑2
𝑦
𝑑𝑥2
= −2
𝑑
𝑑𝑥
𝑥 sin 𝑥2
= −2[sin 𝑥2
+ 2𝑥2
cos 𝑥2
]
⇒
𝑑2
𝑦
𝑑𝑥2
= −2[sin 𝑥2
+ 2𝑥2
cos 𝑥2
]](https://image.slidesharecdn.com/bkoykyhqeezpkaokukkq-neo-neet-11physics-notes-241109140611-fabaf153/75/Neet-class-11-12-basic-mathematics-notes-32-2048.jpg)

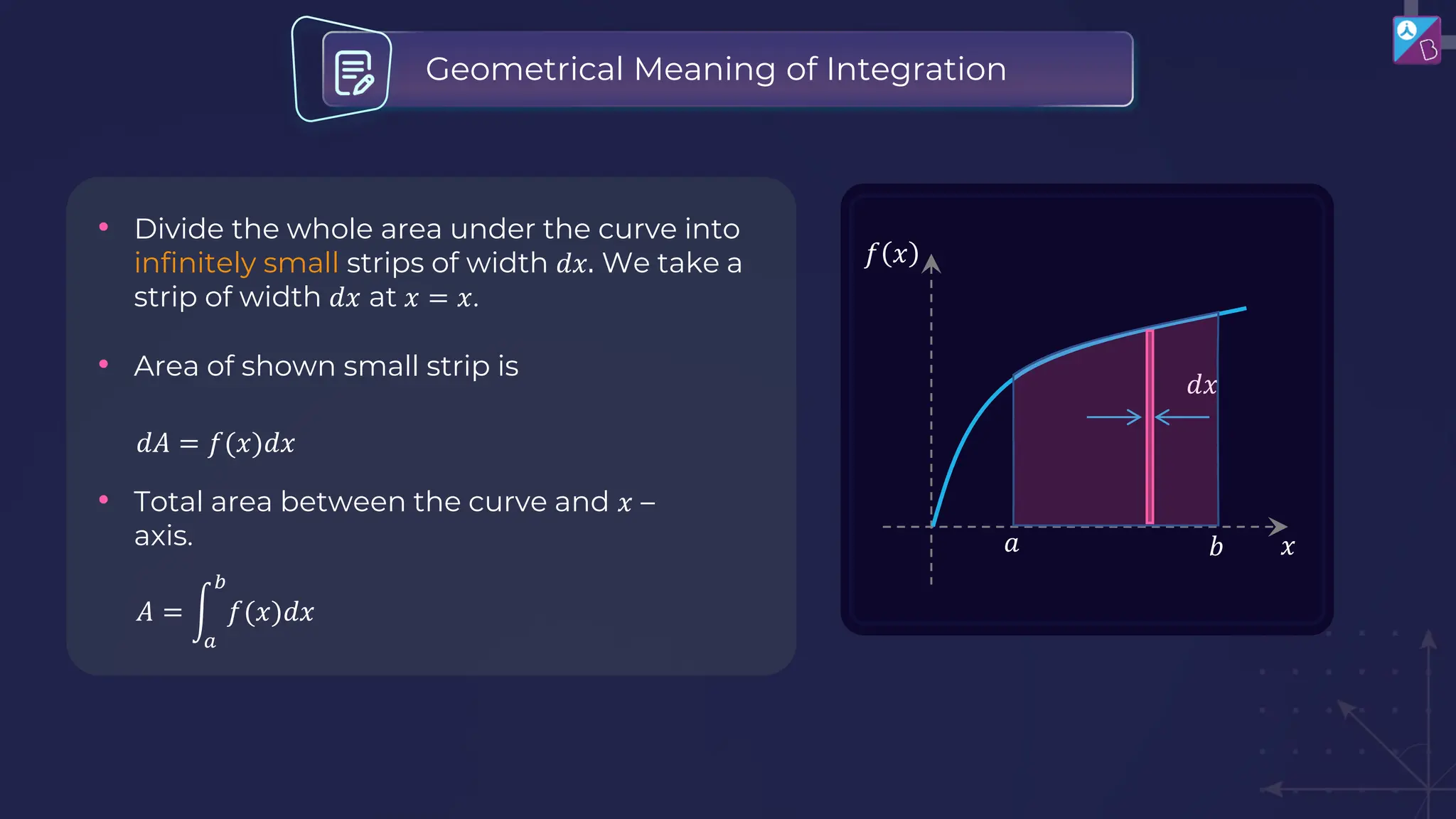
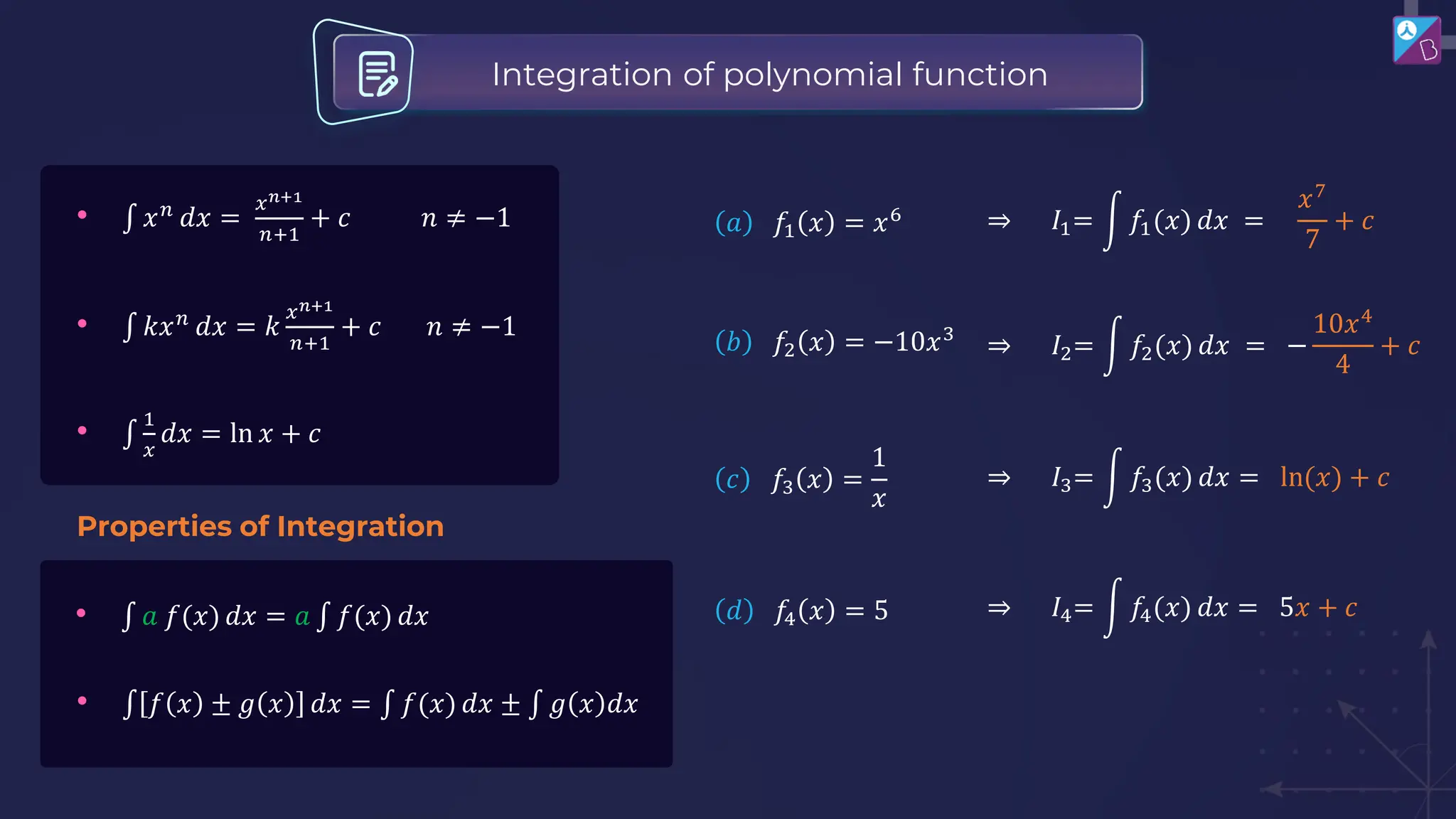
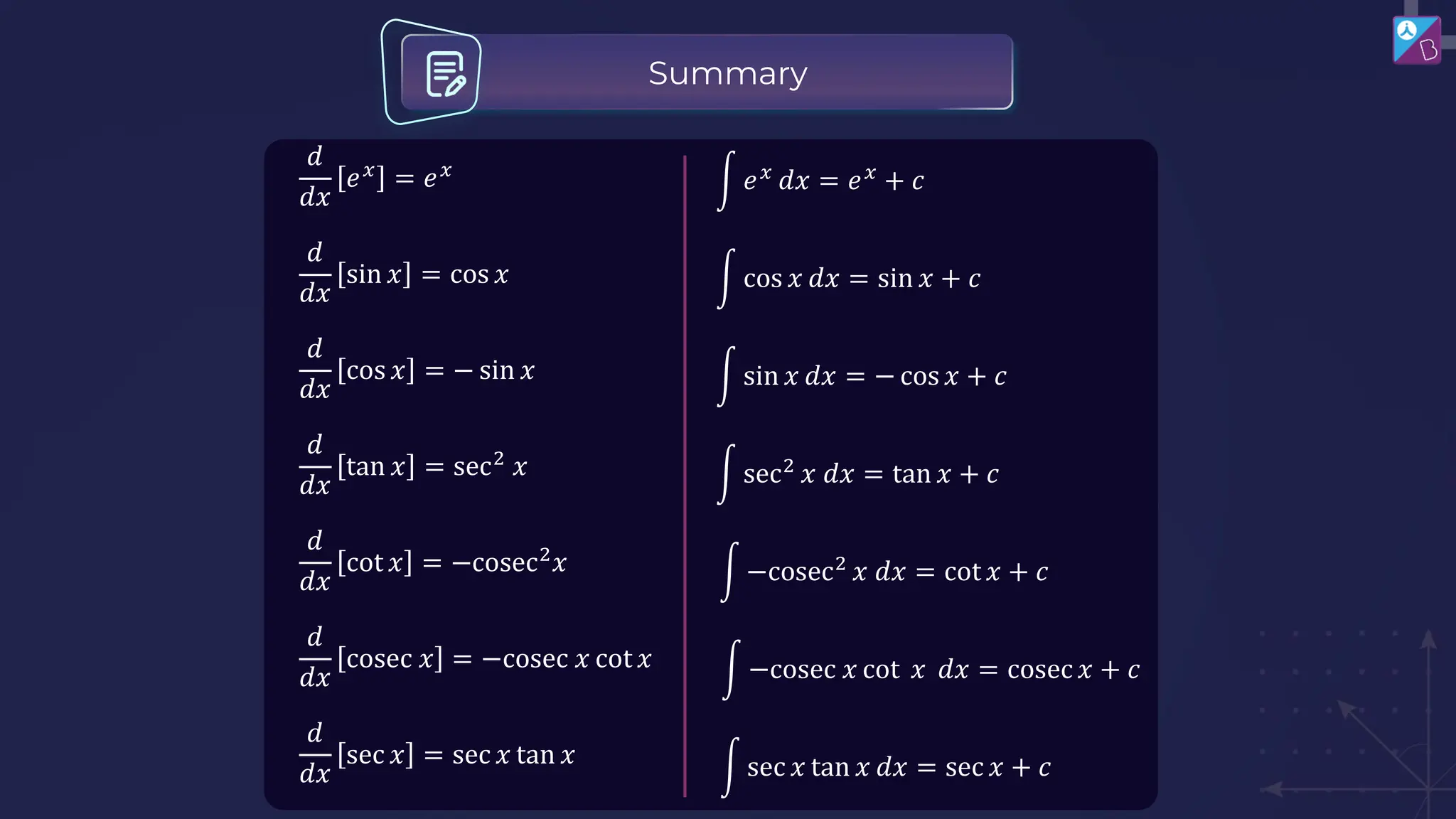
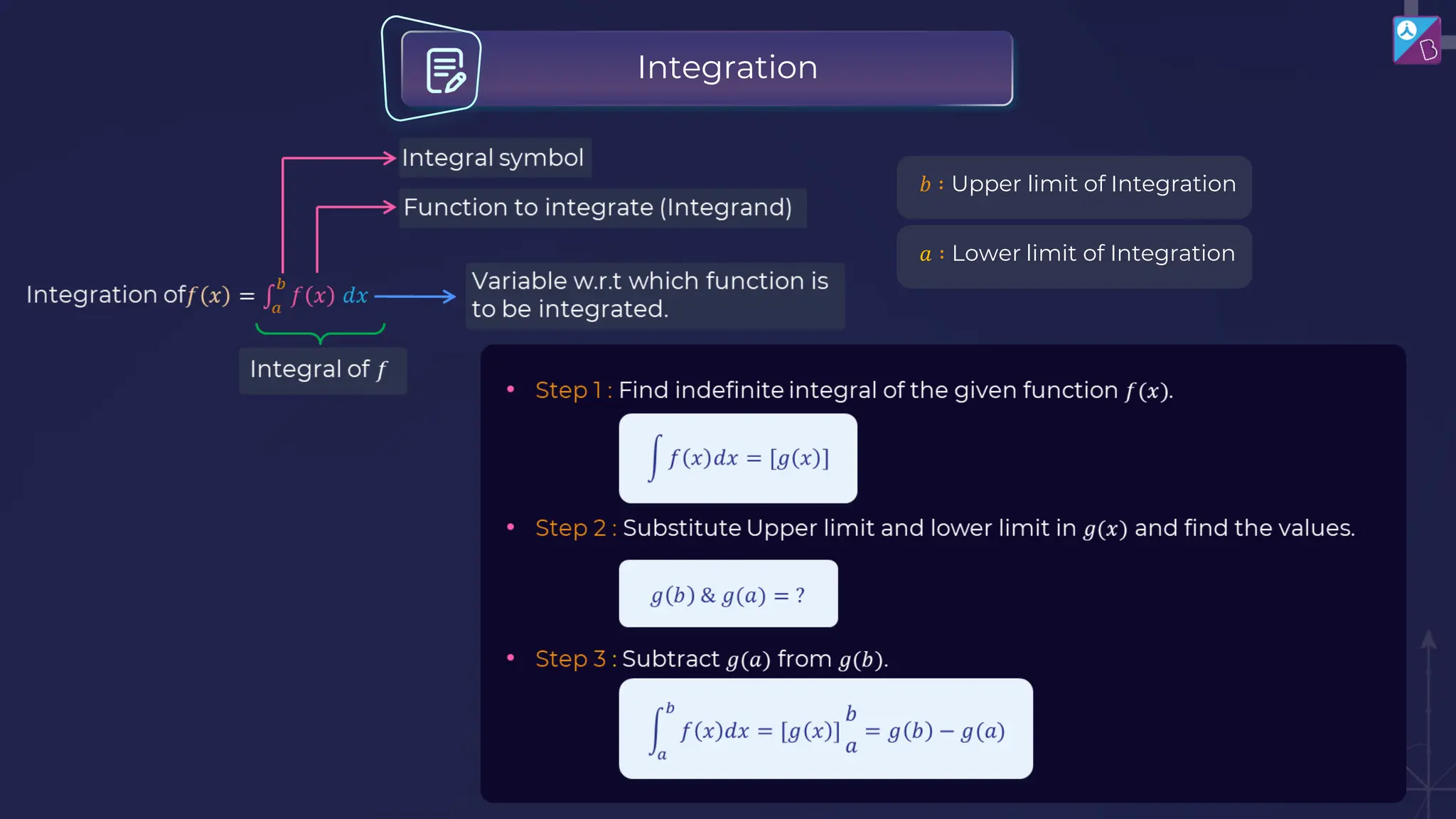
![Integration
Mathematically Integration and
differentiation are inverse of
each other.
• 𝑑
𝑑𝑥
𝑐 = 0
• 𝑑
𝑑𝑥
[𝑘𝑥] = 𝑘
• 𝑑
𝑑𝑥
sin 𝑥 = cos 𝑥
• 𝑑
𝑑𝑥
cos 𝑥 = − sin 𝑥
• 𝑑
𝑑𝑥
tan 𝑥 = sec2
𝑥
• 0 𝑑𝑥 = 𝑐
• 𝑘 𝑑𝑥 = 𝑘𝑥 + 𝑐
• cos 𝑥 𝑑𝑥 = sin 𝑥 + 𝑐
• − sin 𝑥 𝑑𝑥 = cos 𝑥 + 𝑐
• sec2
𝑥 𝑑𝑥 = tan 𝑥 + 𝑐](https://image.slidesharecdn.com/bkoykyhqeezpkaokukkq-neo-neet-11physics-notes-241109140611-fabaf153/75/Neet-class-11-12-basic-mathematics-notes-41-2048.jpg)
![Find the value of
A
B
C
D
ln 2 + 𝐶
ln 2
ln 2 + 1 + 𝐶
ln 2 + 1
න
1
2
1
𝑥
𝑑𝑥
න
1
2
1
𝑥
𝑑𝑥 = [ln 𝑥 ]1
2
= ln(2)](https://image.slidesharecdn.com/bkoykyhqeezpkaokukkq-neo-neet-11physics-notes-241109140611-fabaf153/75/Neet-class-11-12-basic-mathematics-notes-50-2048.jpg)