Download to read offline

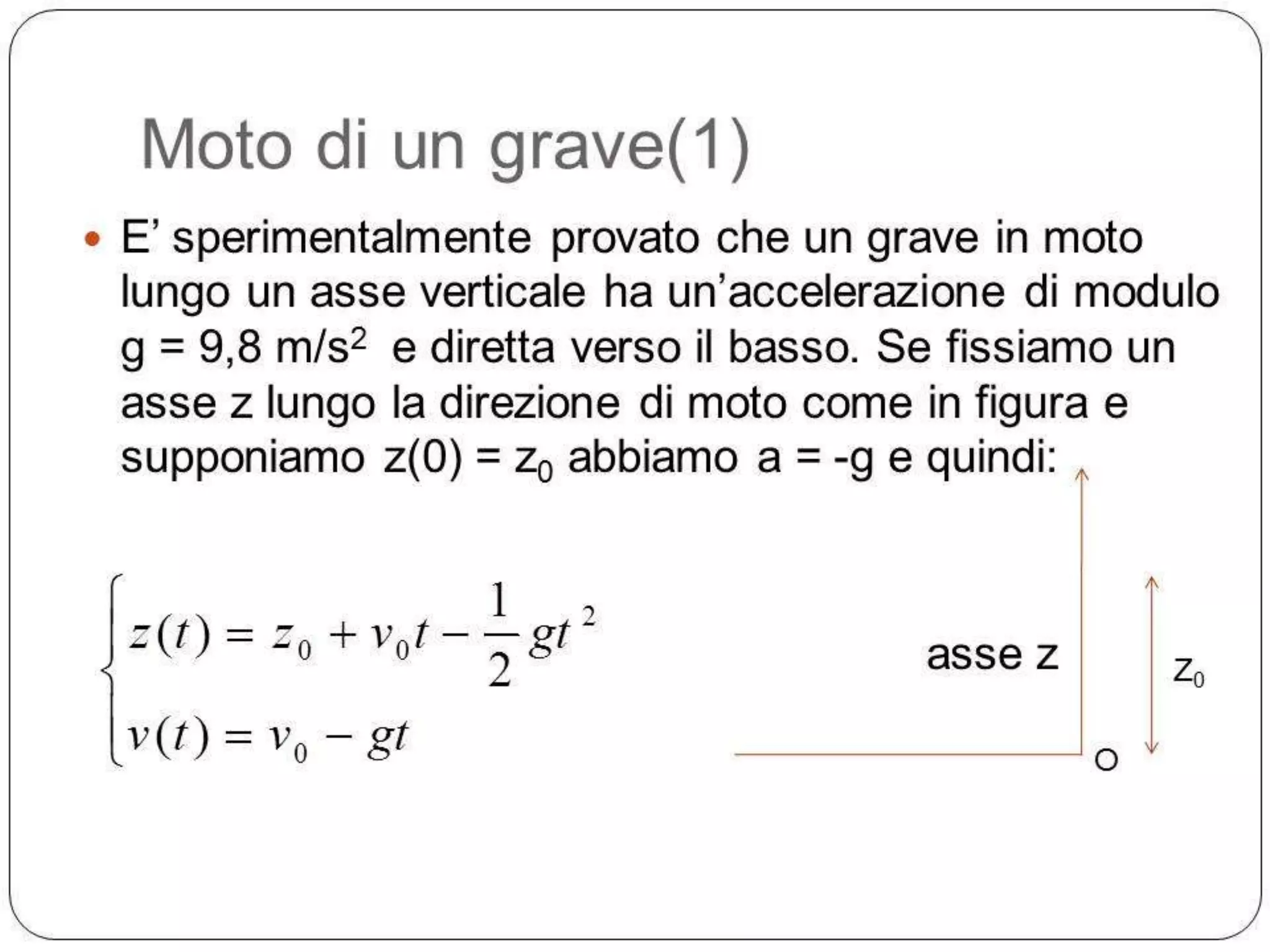
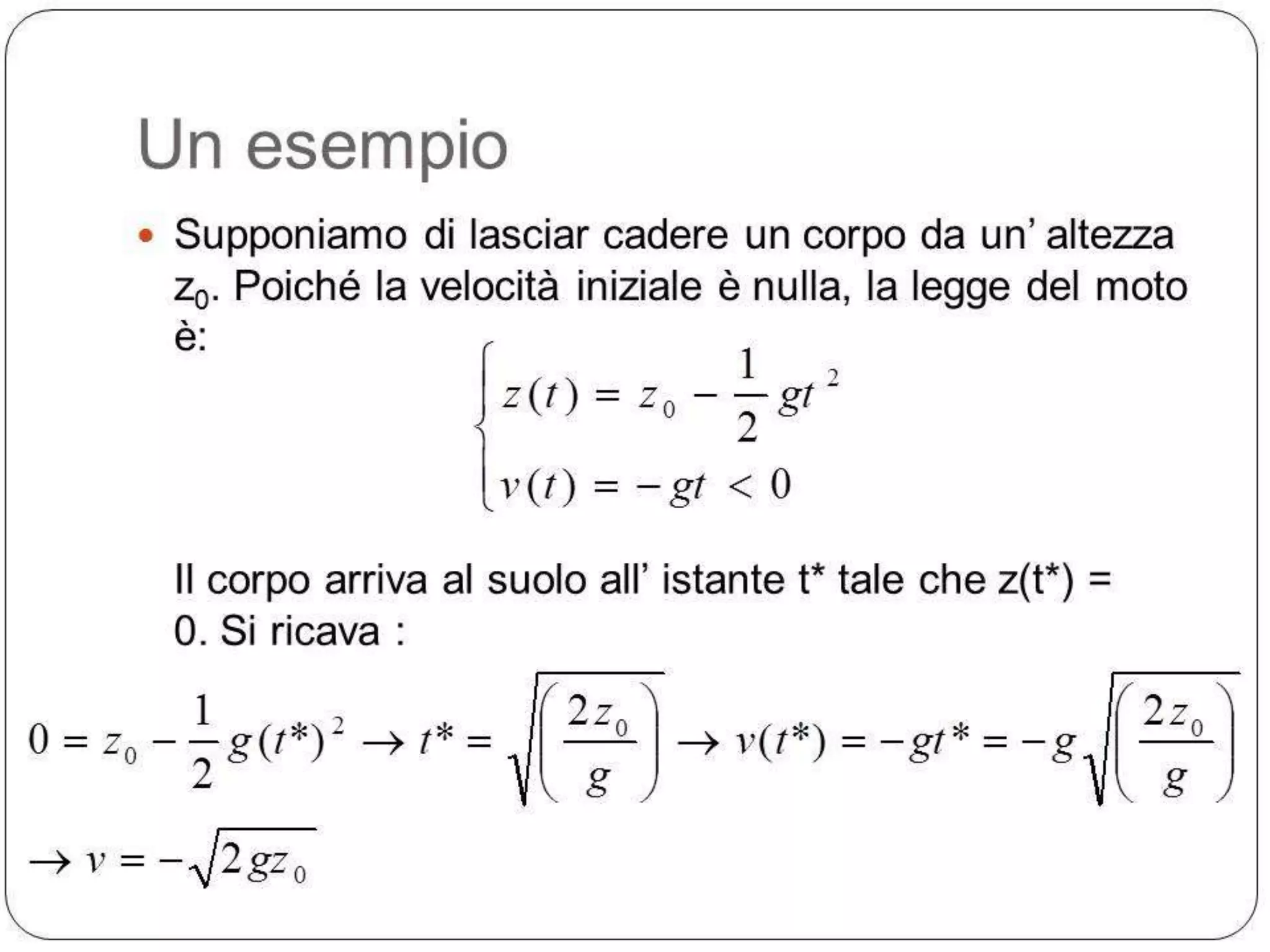
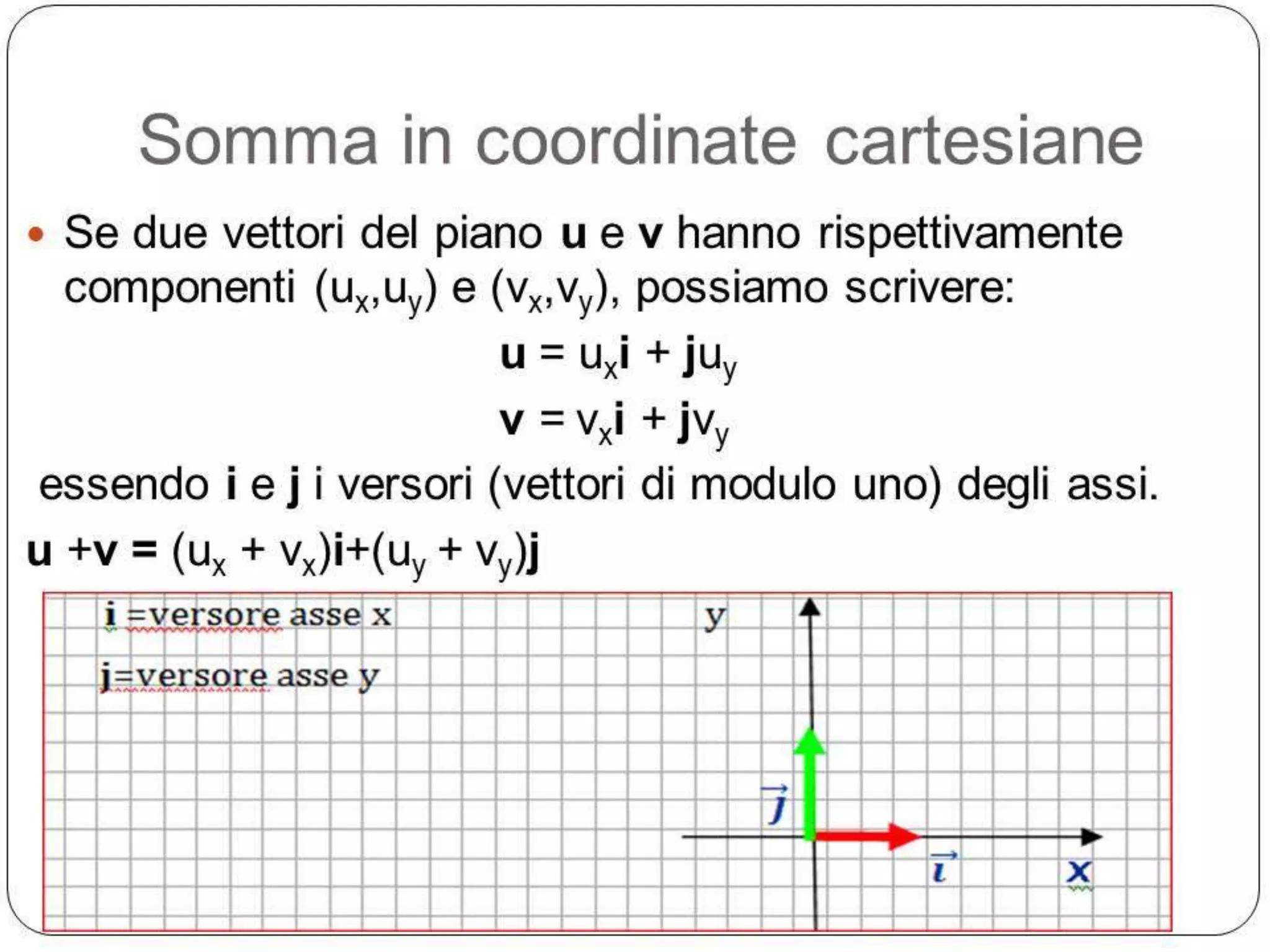
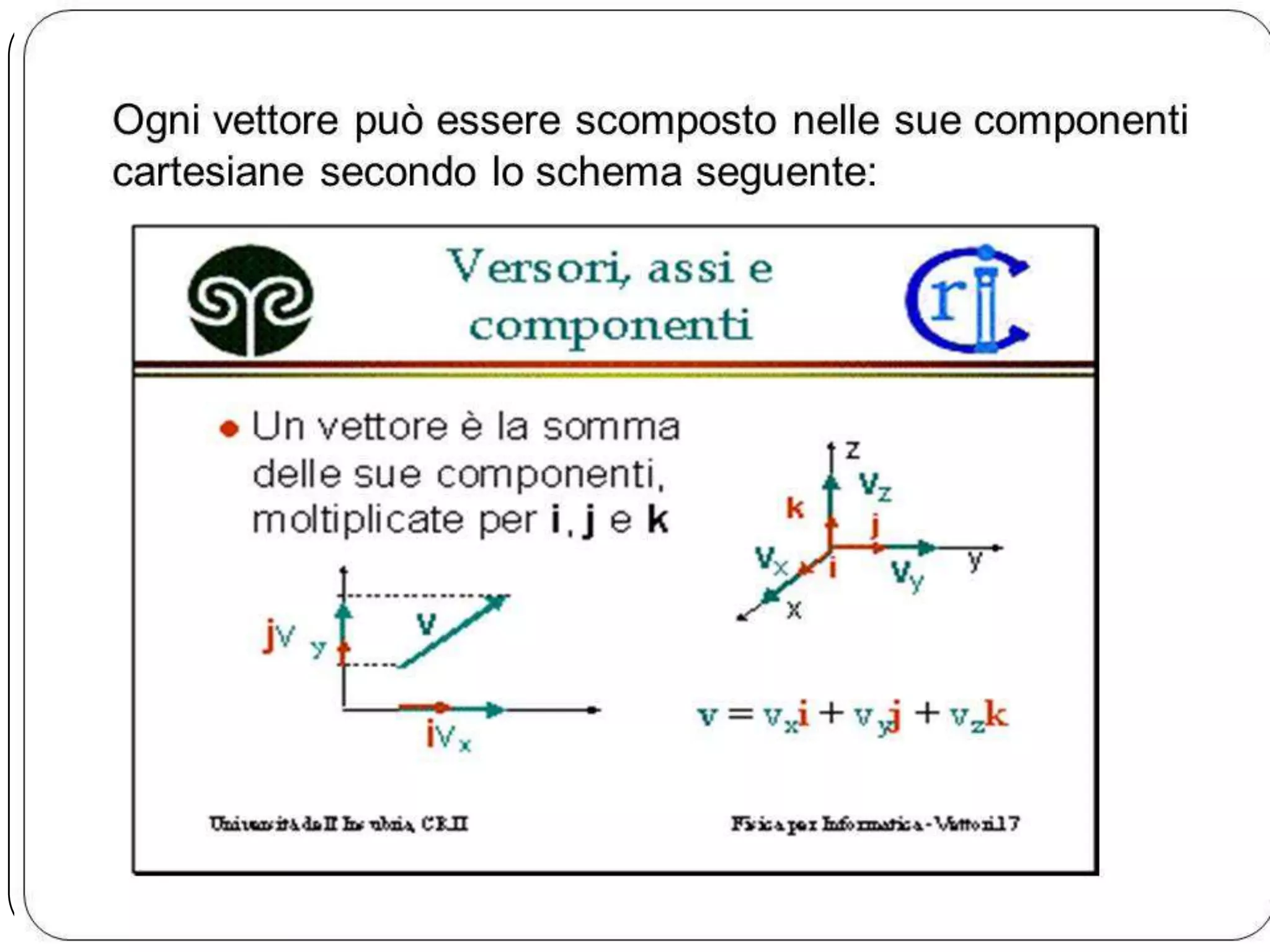
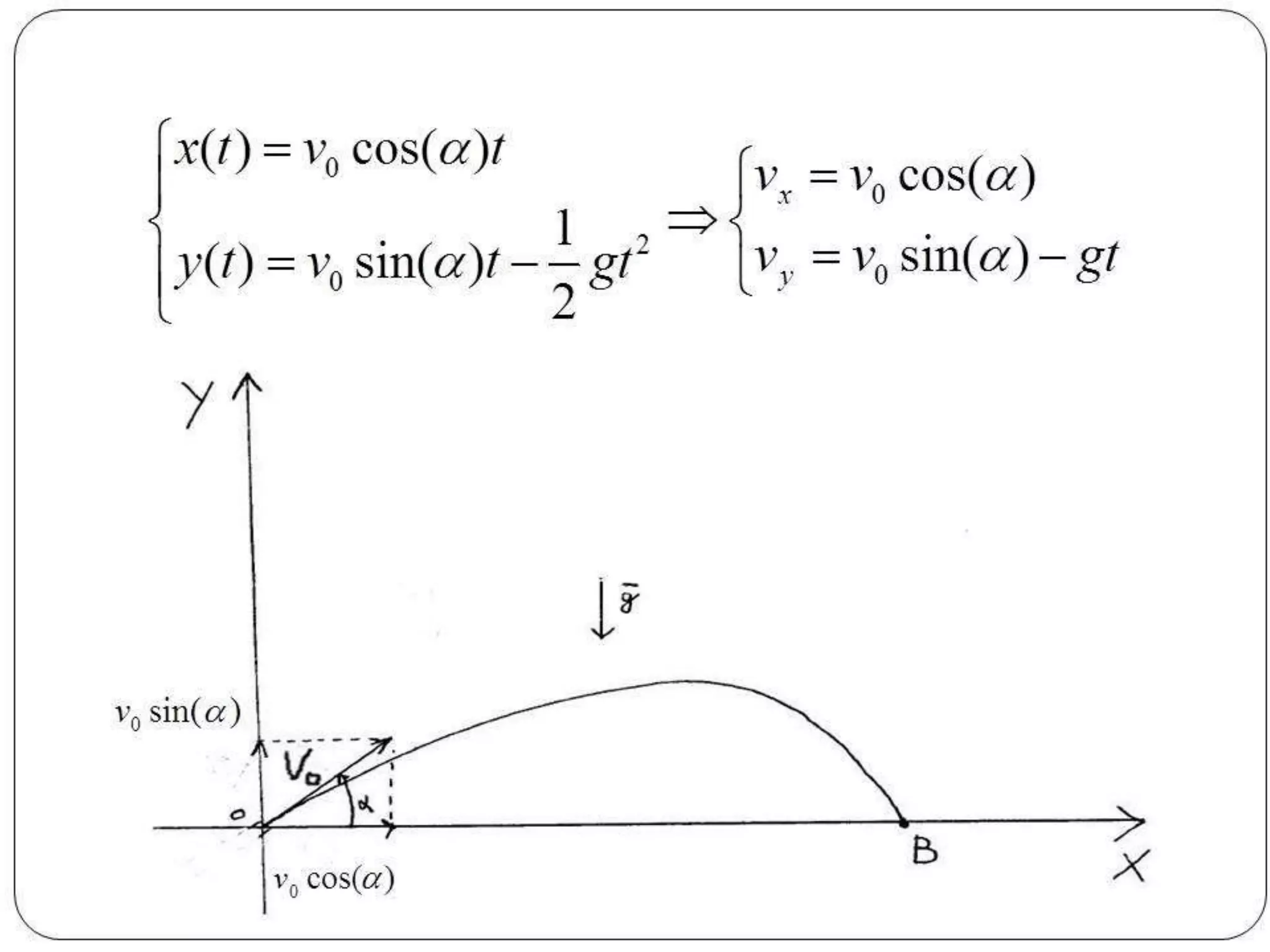
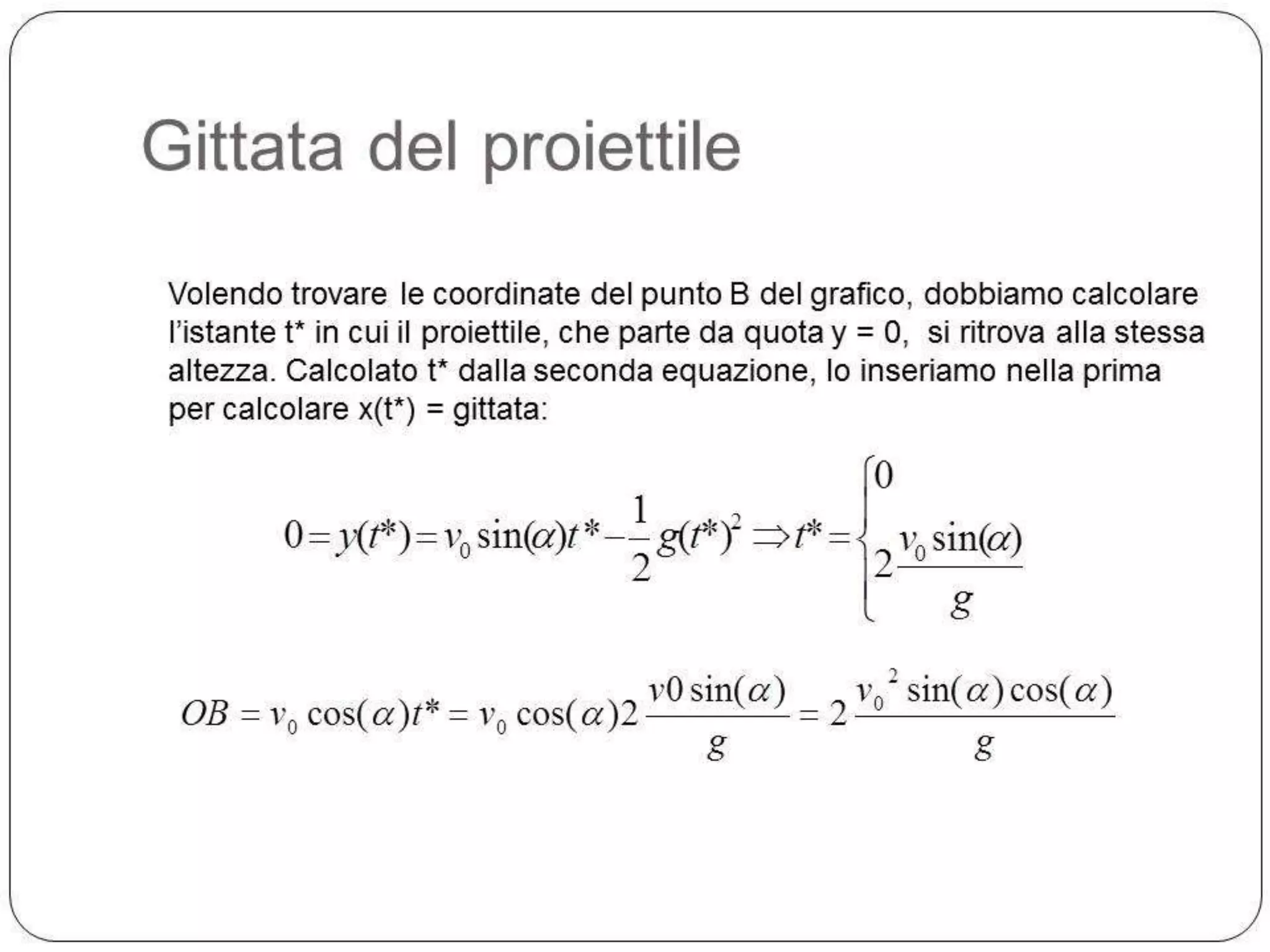
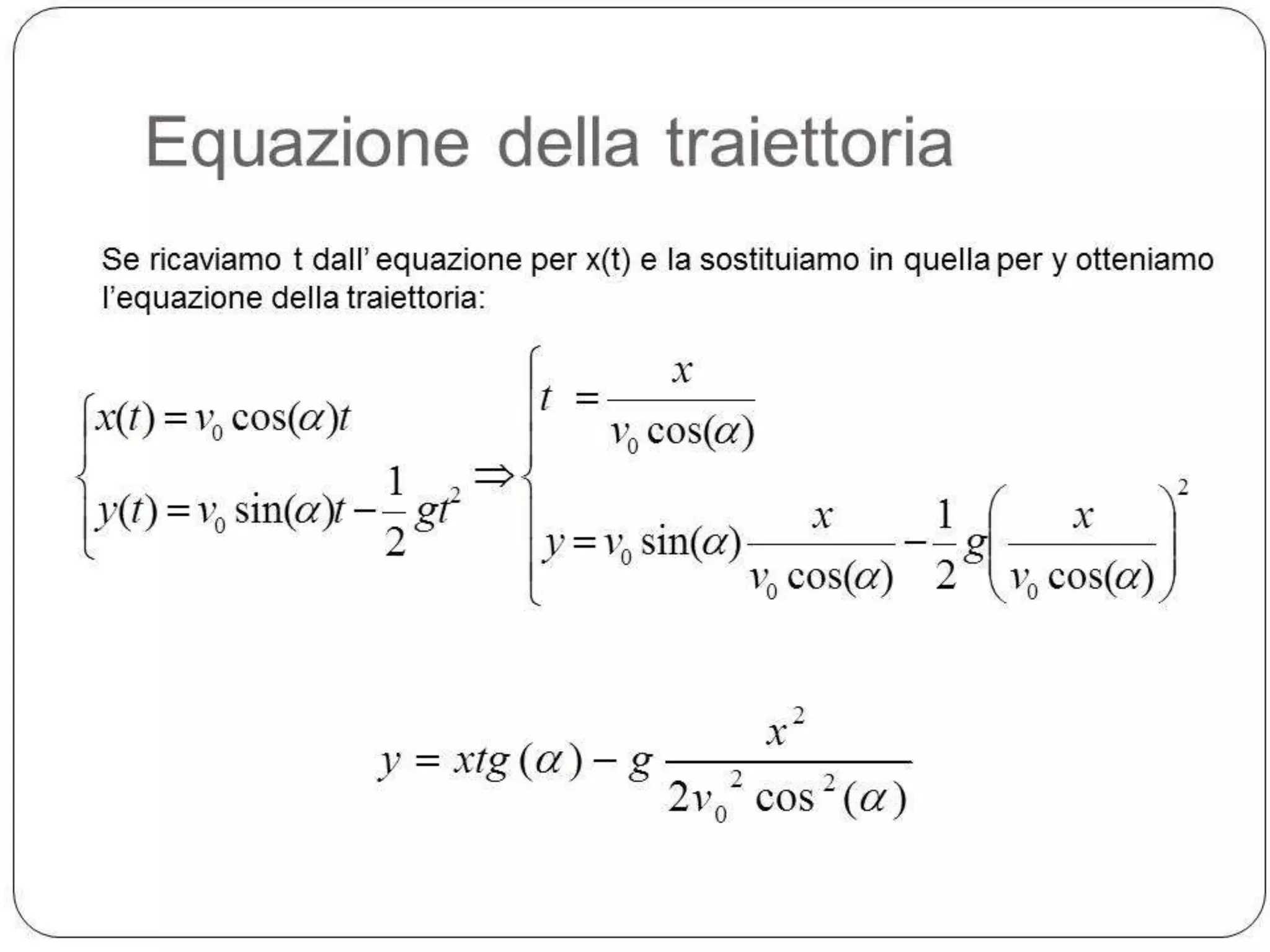

Il documento tratta del moto di un grave soggetto all'accelerazione di gravità di 9,8 m/s² e delle leggi del moto parabolico per un proiettile. Viene spiegato come calcolare la posizione e la velocità in funzione del tempo, utilizzando le componenti cartesiane per risolvere le equazioni del moto. Infine, viene indicato un link per esercizi pratici da svolgere.

































