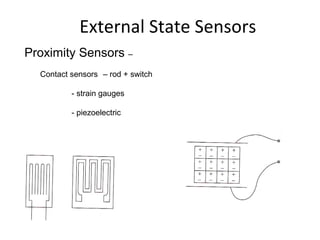
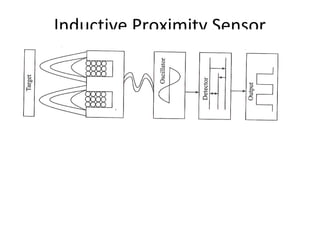
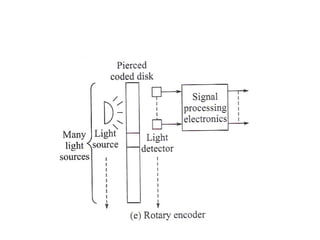
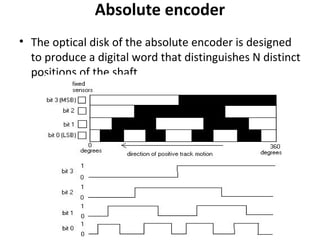
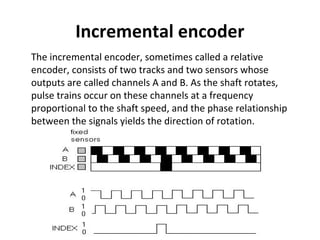
This document discusses various types of sensors used in mechatronics systems for measuring velocity, acceleration, position, and proximity. It describes tachometers, Hall effect sensors, accelerometers, linear variable differential transformers (LVDT), optical encoders, and Moire fringe transducers. These sensors convert physical quantities like motion, speed, position into electrical signals for processing.