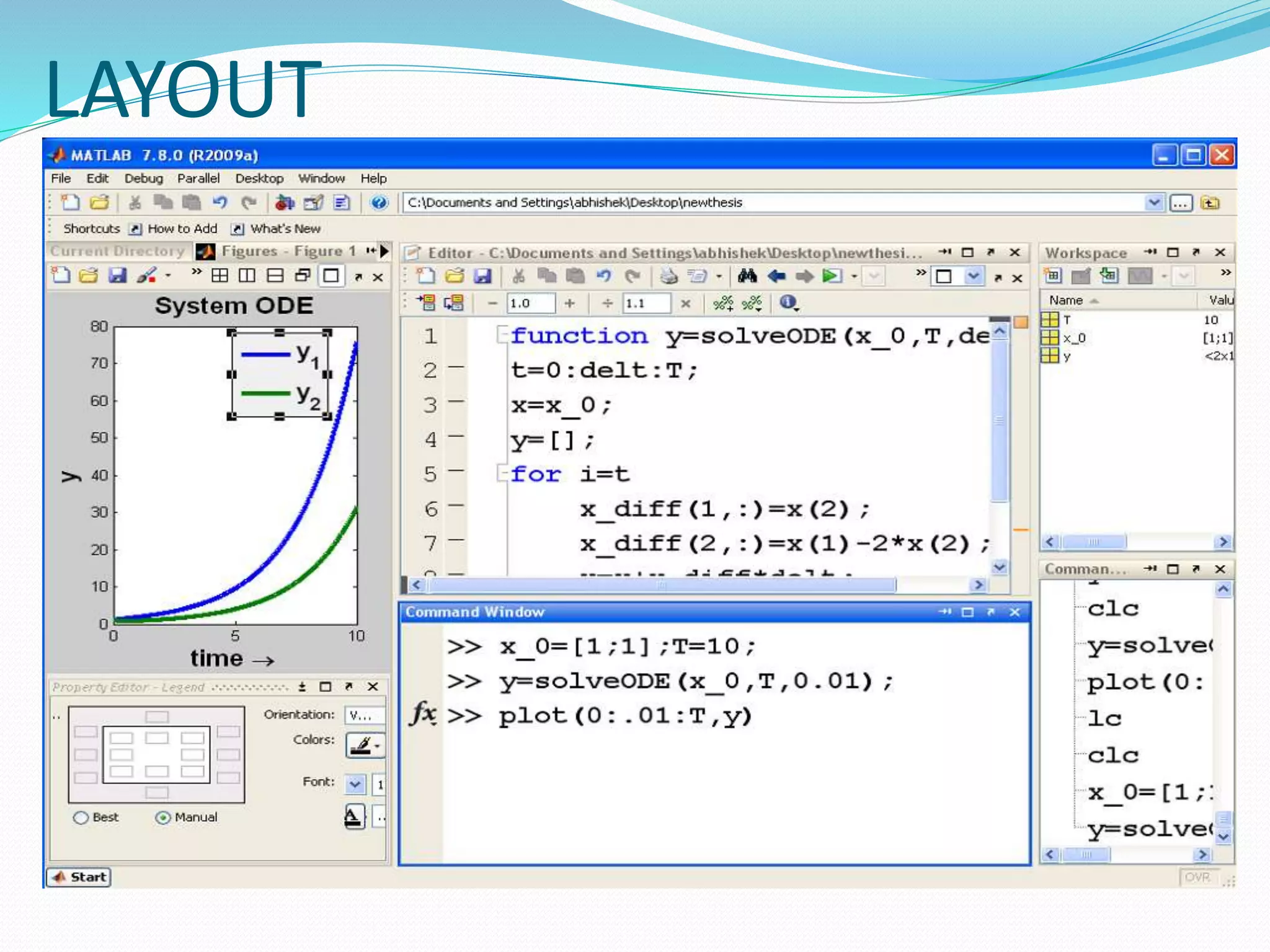
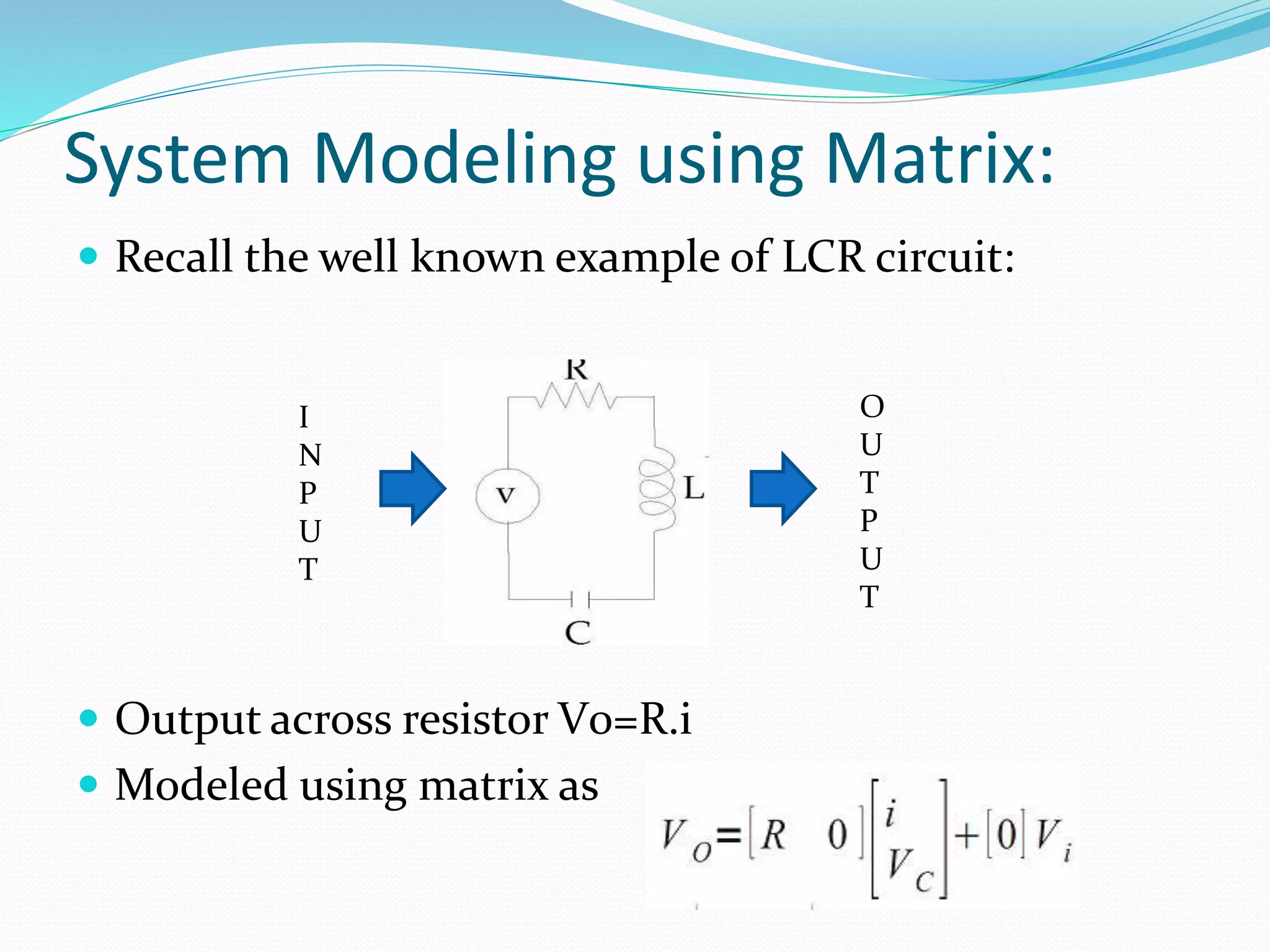
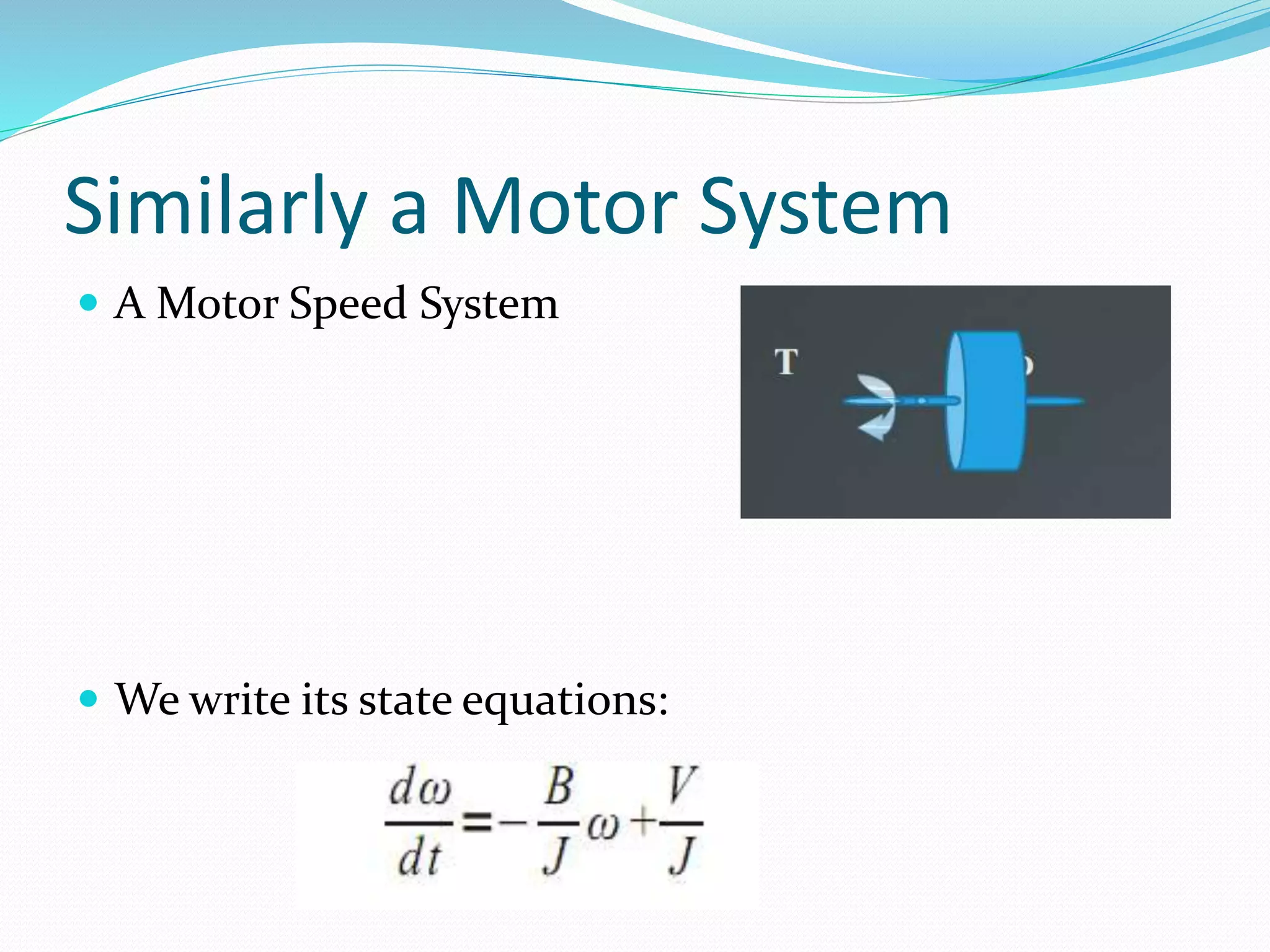
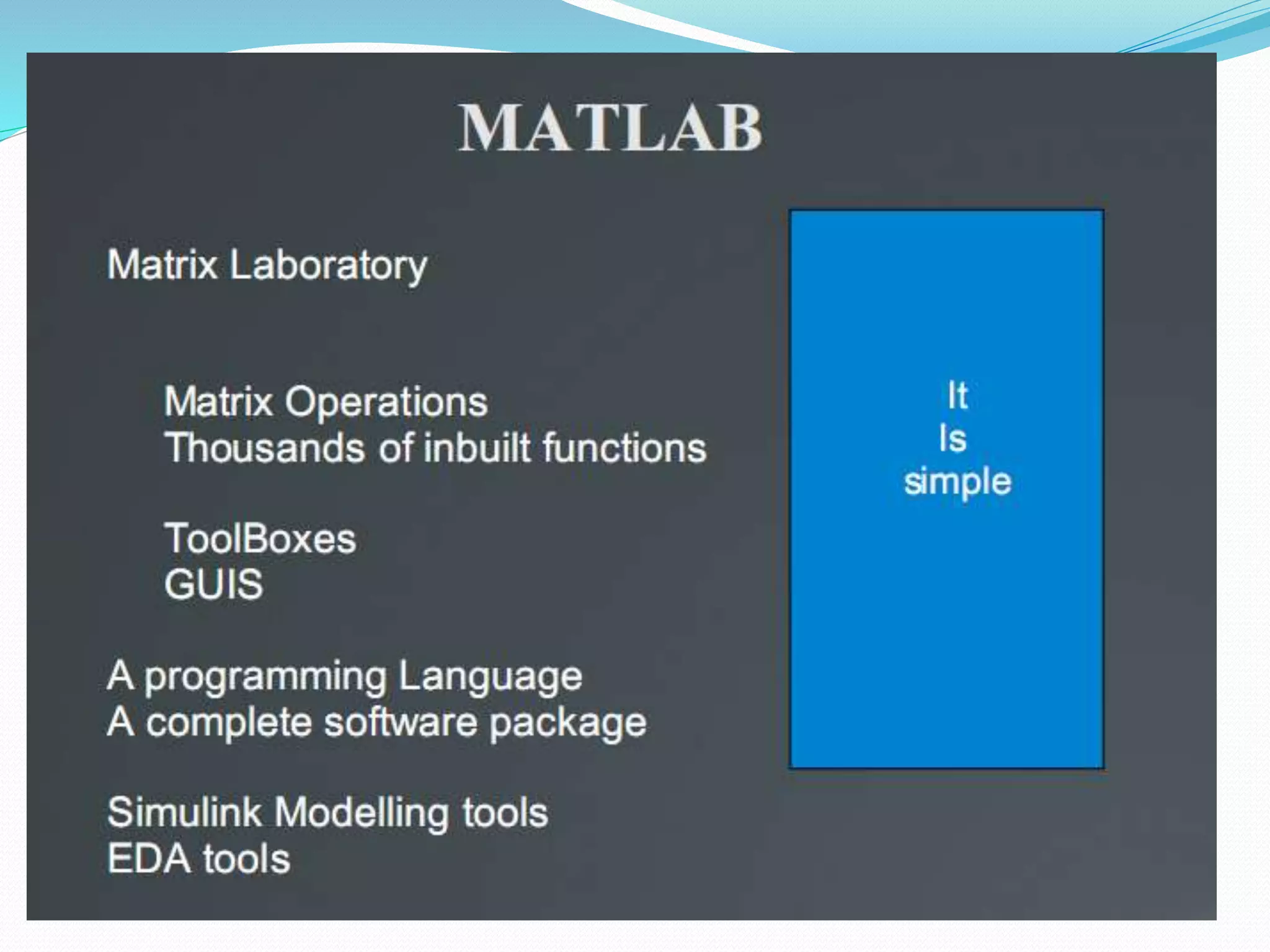
This document provides an overview of MATLAB, including what it is, its basic layout and functions. It discusses that MATLAB is a matrix laboratory for doing matrix operations and modeling systems. It explains how to define matrices, use basic operators and functions in MATLAB, including creating matrices using colons and concatenating matrices. It also gives some examples of typical MATLAB functions for mathematical operations, matrix operations, and creating matrices.
![Defining Matrices:
Just write all the entries separated by the space or
comma and enclosed in a bracket []
A=[1 2 3 2]
Or
A=[1,2,3,2]
For column matrix, put semicolon ; in between
A=[1;2;3;2]](https://image.slidesharecdn.com/b19e5180-a5e5-4862-a753-85e382be8bdd-150725193452-lva1-app6892/75/matlab-7-2048.jpg)
![Polynomials in MATLAB
A polynomial can be represented in the form of
coefficients. For example, if you want to write
You have to just write [1 2 2 5]
Each number represents the value of coefficients.
This will be represented as [1 0 2 5]](https://image.slidesharecdn.com/b19e5180-a5e5-4862-a753-85e382be8bdd-150725193452-lva1-app6892/75/matlab-10-2048.jpg)
![Transfer Functions
Polynomials
[K2]
[1 2 K2]](https://image.slidesharecdn.com/b19e5180-a5e5-4862-a753-85e382be8bdd-150725193452-lva1-app6892/75/matlab-13-2048.jpg)
![Define Matrixs
Mix , and ; to make 2 D matrix
A=[1 2 3 2; 1 3 2 1;2 3 6 1]
Make A 1 to 10 Matrix
A=[1 2 3 4 5 6 7 8 9 10];
Make 1 to 100
Tired??
Use colon :Which mean “TO”
A=[1:100];](https://image.slidesharecdn.com/b19e5180-a5e5-4862-a753-85e382be8bdd-150725193452-lva1-app6892/75/matlab-20-2048.jpg)
![Colon (:) = TO
[1:4]
Gives a vector from 1 to 4
1 2 3 4
[1:0.5:4]
Gives a vector from 1 to 4 with step 0.5
1 1.5 2 2.5 3 3.5 4
[0:0.1:2*pi]
Gives a vector containing 0 to 2π](https://image.slidesharecdn.com/b19e5180-a5e5-4862-a753-85e382be8bdd-150725193452-lva1-app6892/75/matlab-21-2048.jpg)
![Concatenation of Matrices
Suppose A, B, C are matrices
If we write [A B] or [A,B]
If we write [A;B]
Similarly [A B C] and [A;B;C]
[[A B];C]](https://image.slidesharecdn.com/b19e5180-a5e5-4862-a753-85e382be8bdd-150725193452-lva1-app6892/75/matlab-26-2048.jpg)
![ Crete a with size 4x5
With elements from 3to7
uGP
Arn-1
N=[1:20]
Y=2*(1/2).^(N-1)](https://image.slidesharecdn.com/b19e5180-a5e5-4862-a753-85e382be8bdd-150725193452-lva1-app6892/75/matlab-27-2048.jpg)