This document provides an overview of the FreeRTOS real-time operating system. It discusses that FreeRTOS is an open source, portable, and royalty-free RTOS kernel that is used in various commercial and industrial applications. It describes some of FreeRTOS's key components like tasks, queues for inter-process communication, semaphores for synchronization, and its preemptive priority-based scheduler. The document also provides details on FreeRTOS configuration, task states, priorities, the idle task, and how tasks are created and controlled using task control blocks and API calls.











![Tasks – Task Details
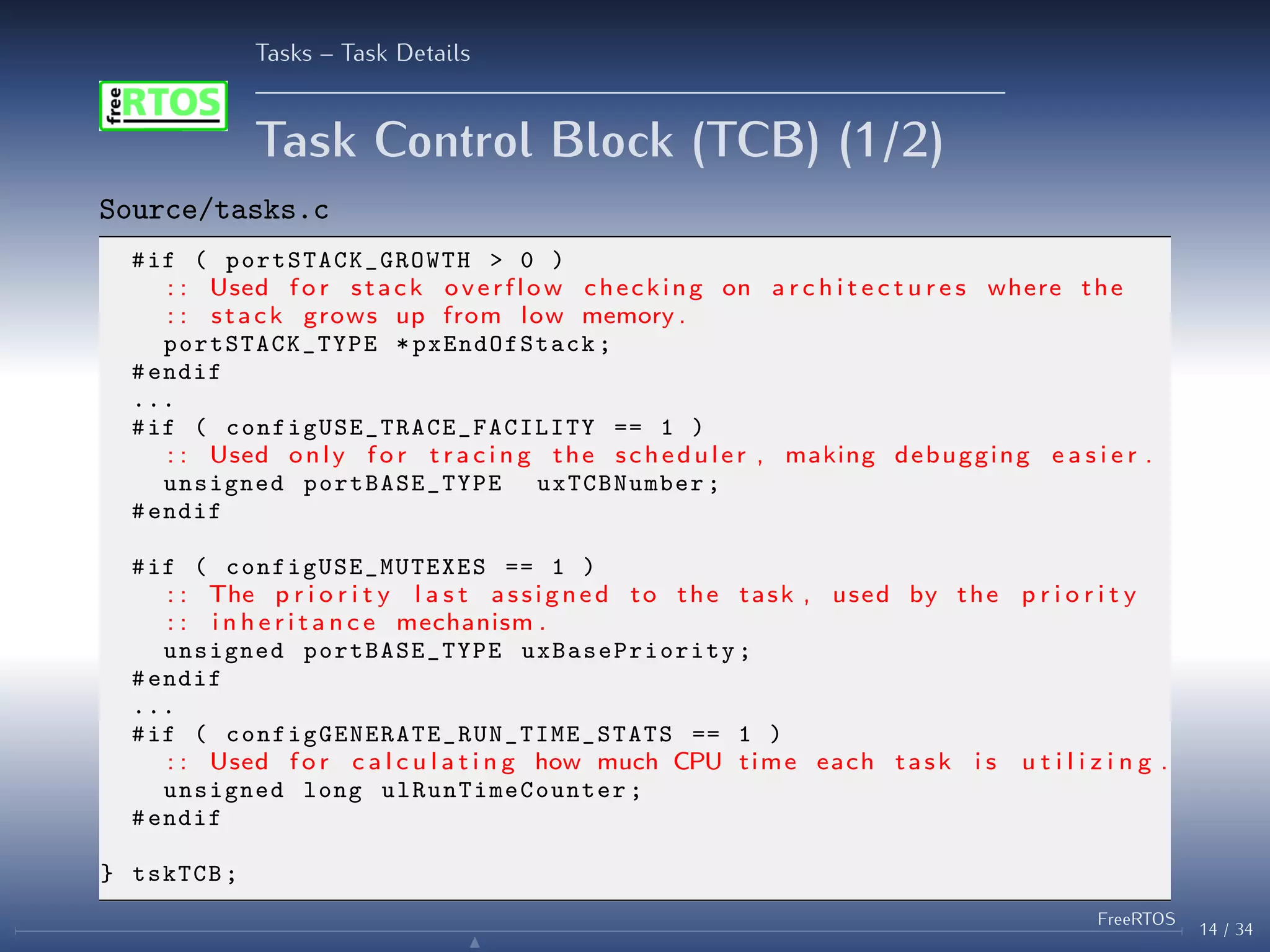
Task Control Block (TCB) (0/2)
A TCB is allocated to each task. It stores the task’s context.
Source/tasks.c
typedef struct tskTaskControlBlock
{
: : Top of task ’ s stack . Must be f i r s t member b/c of context switch
volatile portSTACK_TYPE * pxTopOfStack ; : : code ( l a t e r s l i d e s ) .
#if ( portUSING_MPU_WRAPPERS == 1 )
: : The MPU s e t t i n g s are defined as part of the port l a y e r .
xMPU_SETTINGS xMPUSettings ; : : Must be 2nd member of s t r u c t .
#endif
: : L i s t item used to place the TCB in ready and blocked queues .
xListItem xGenericListItem ;
: : Used to place the TCB in event l i s t s .
xListItem xEventListItem ;
: : The p r i o r i t y of the task where 0 i s the lowest p r i o r i t y .
unsigned portBASE_TYPE uxPriority;
: : Points to the s t a r t of the stack .
portSTACK_TYPE *pxStack;
: : D e s c r i p t i v e name given to the task when created .
: : F a c i l i t a t e s debugging only .
signed char pcTaskName[ configMAX_TASK_NAME_LEN ];
13 / 34
FreeRTOS
N](https://image.slidesharecdn.com/freertos-proj-230315172519-9630359e/75/freertos-proj-pdf-16-2048.jpg)