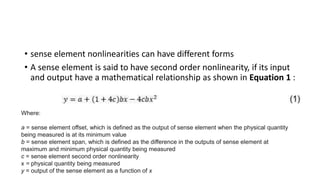
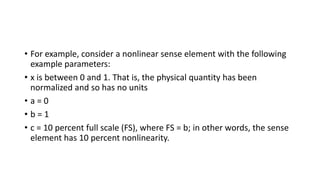
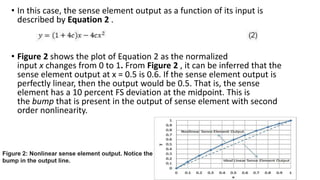
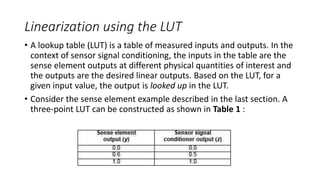
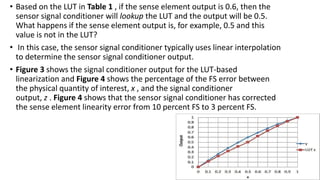
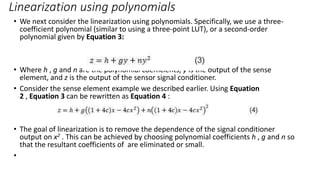
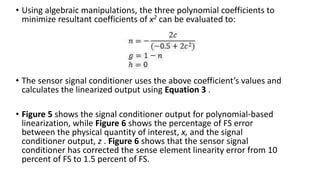
This document discusses linearizing the output of nonlinear sense elements in sensor signal conditioners. It describes how sense elements can have second-order nonlinearities and provides an example. It then summarizes two common approaches to linearization: using a lookup table (LUT) to map sense element outputs to linear outputs, and using polynomials to remove the dependence of the output on the nonlinear term. The document shows that both LUT-based and polynomial-based linearization can significantly reduce the nonlinearity error compared to the original sense element output.












![Sensor Technology Lecture 6 [Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/lecture6autosaved-250626060615-a31db175-thumbnail.jpg?width=640&height=640&fit=bounds)




![Lesson[1].pdf process and instrumentation notes](https://cdn.slidesharecdn.com/ss_thumbnails/lesson1-240610173012-2b12f7a8-thumbnail.jpg?width=640&height=640&fit=bounds)