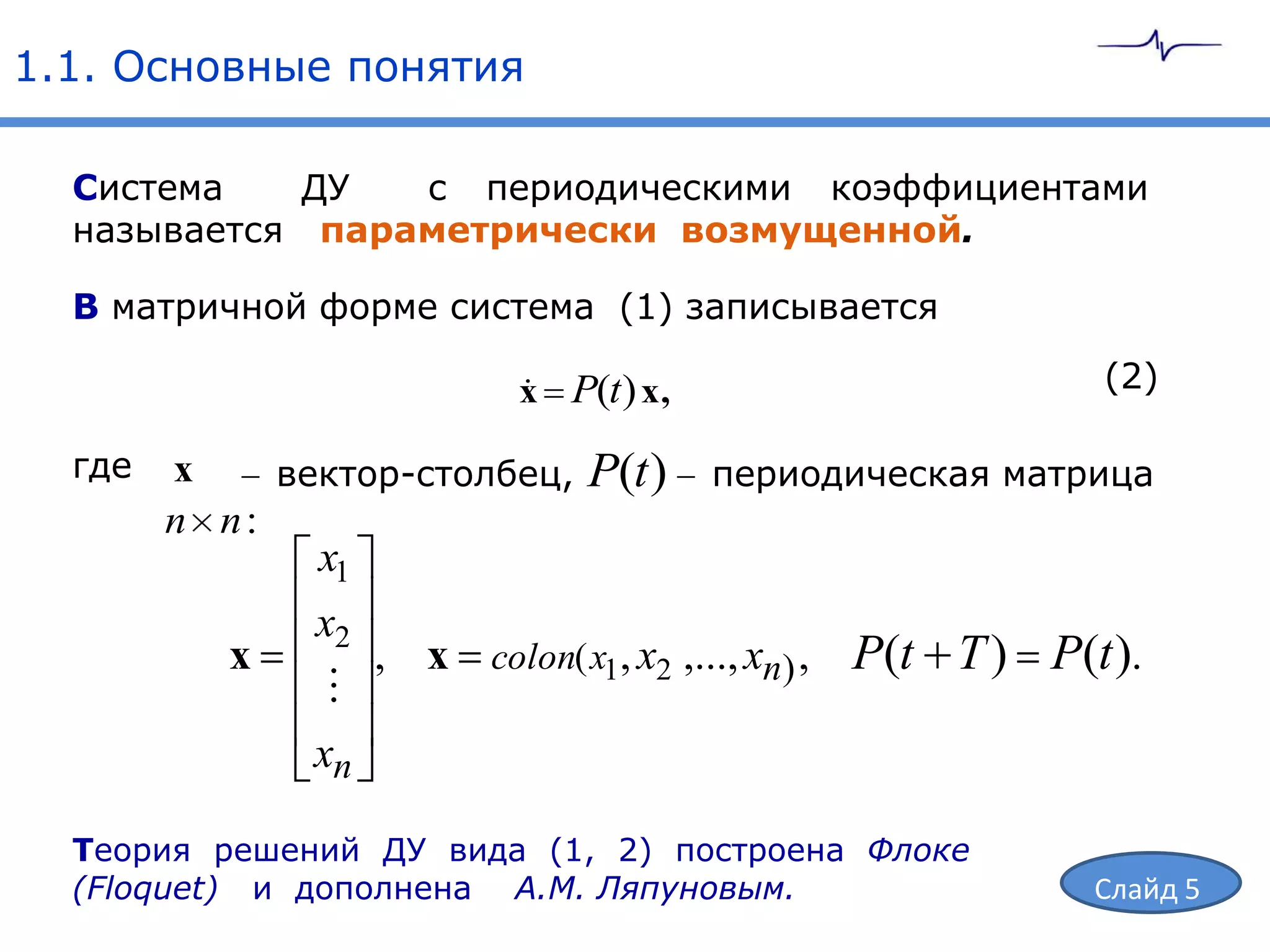
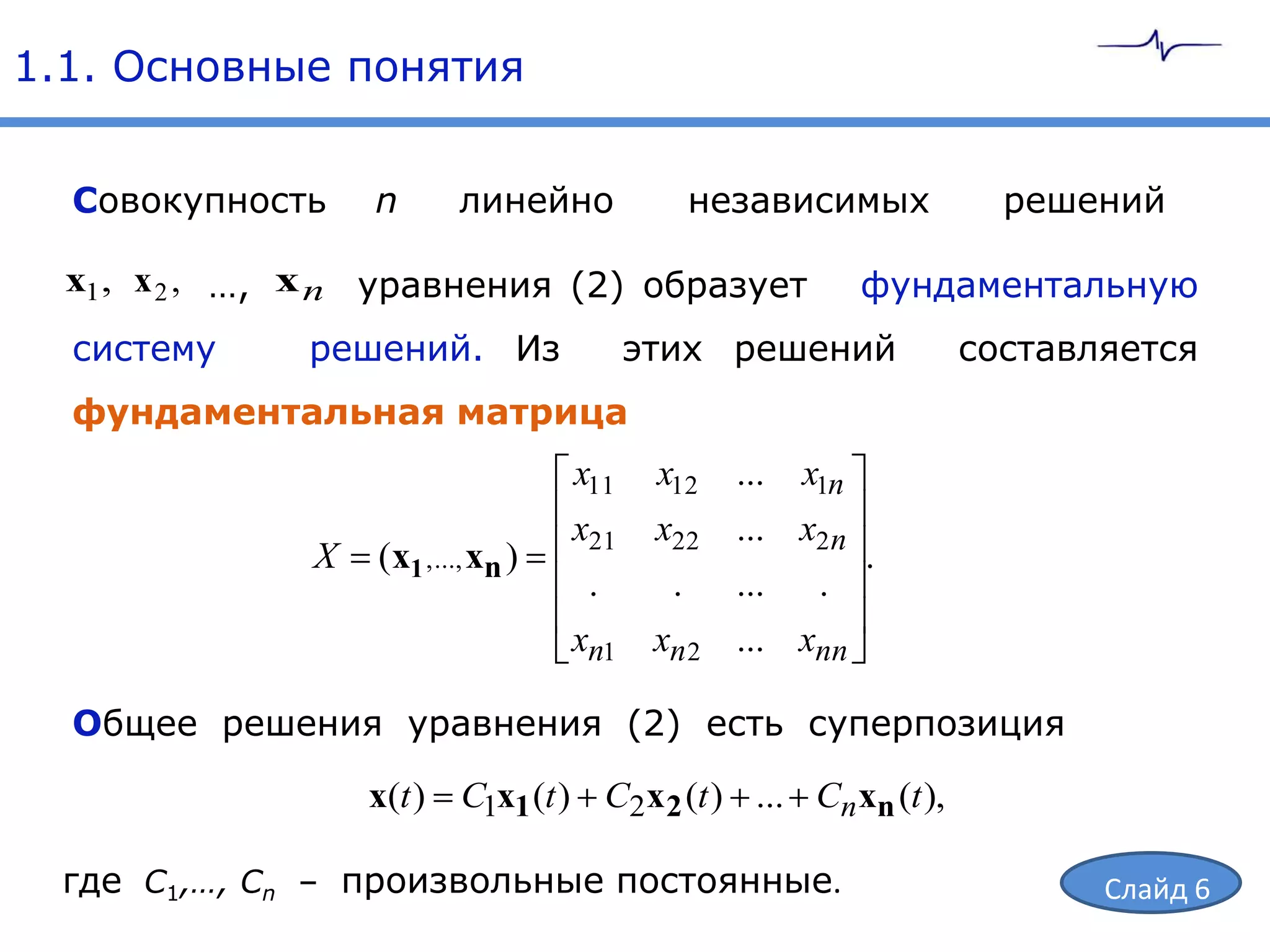
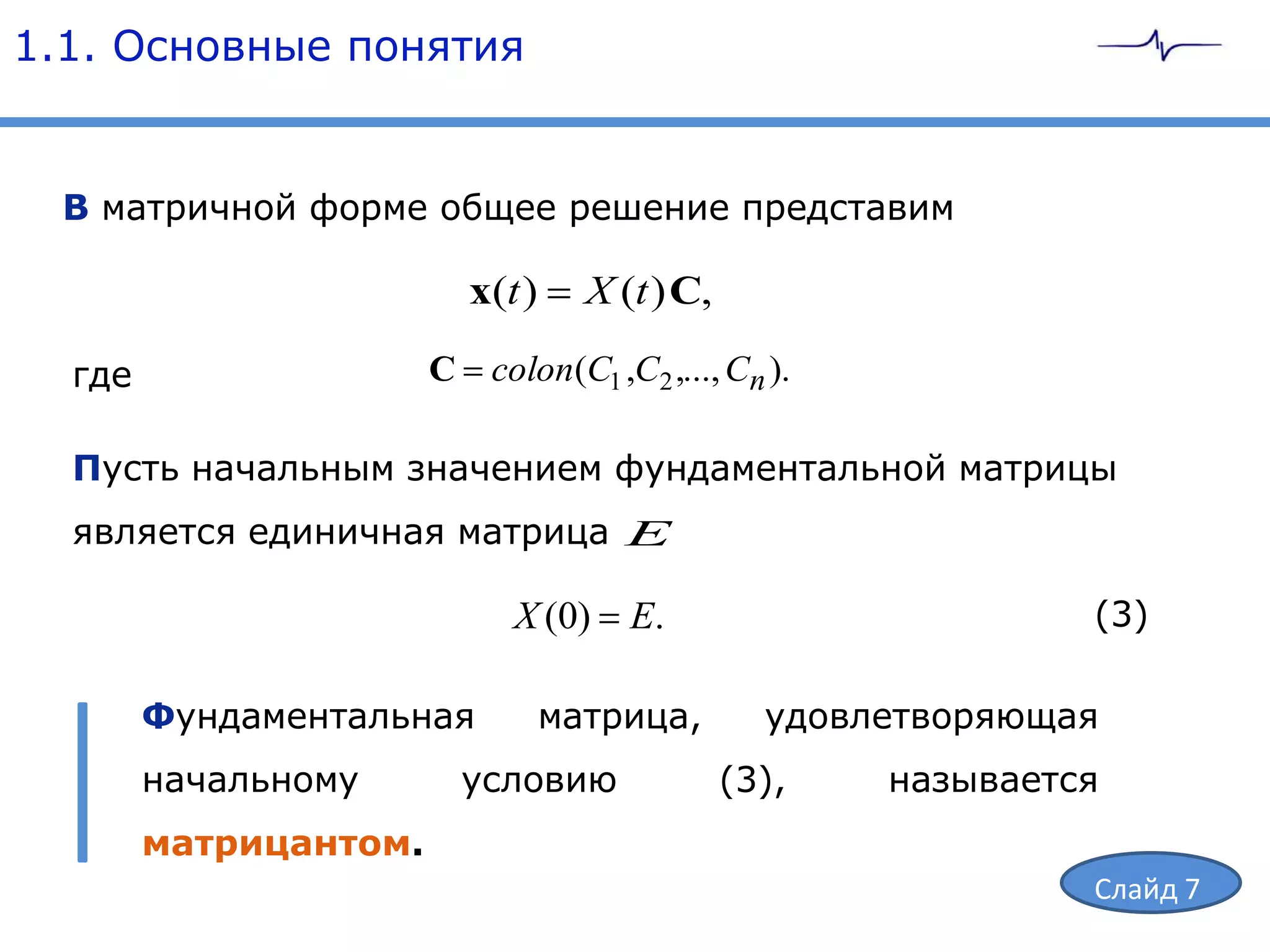
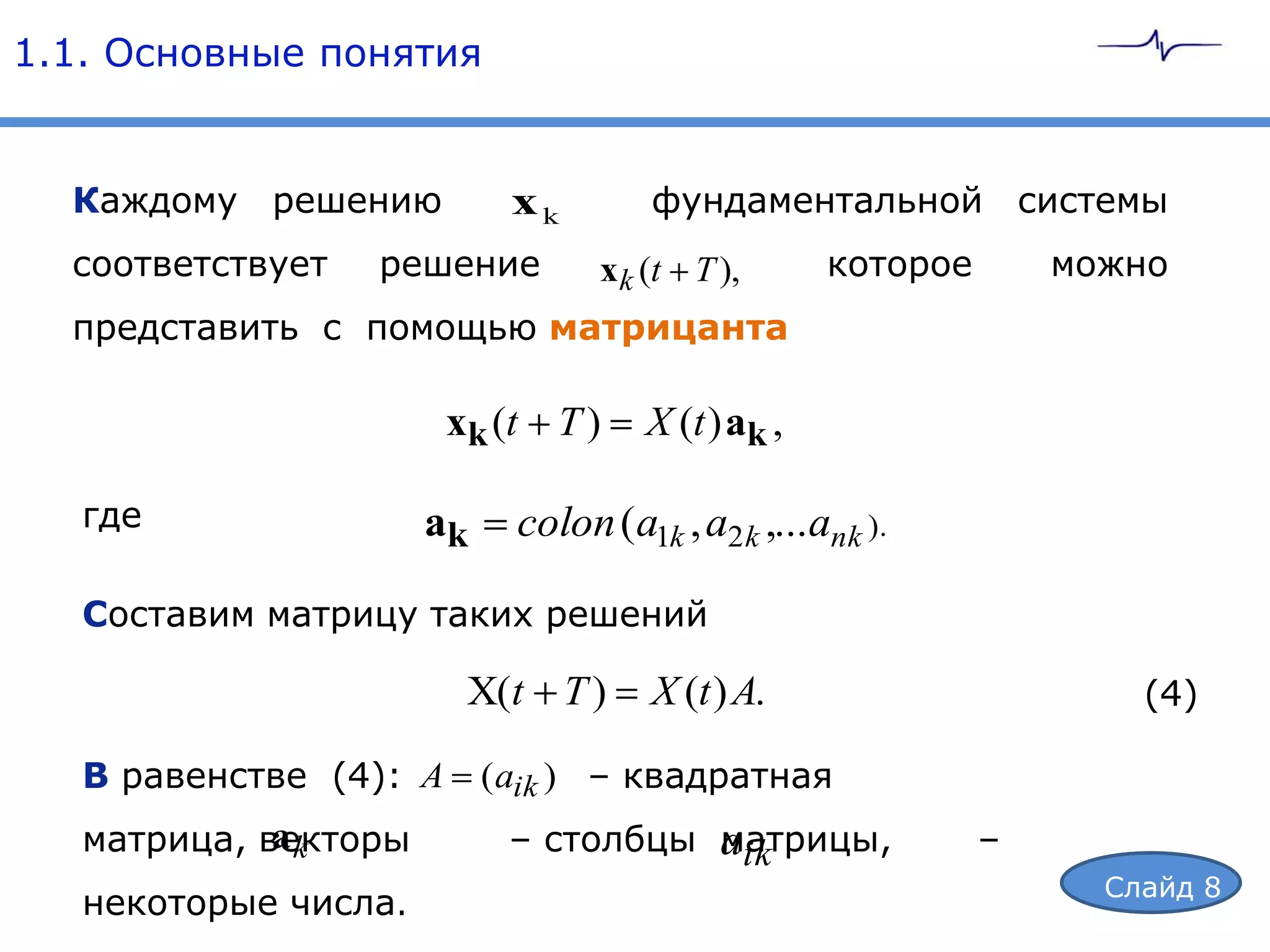
Документ посвящен параметрическим колебаниям в системах линейных дифференциальных уравнений с периодическими коэффициентами. Он охватывает свойства решений, устойчивость, уравнения Хилла и явление параметрического резонанса, а также включает диаграмму устойчивости Айнса-Стретта и практические примеры. В работе рассматриваются основные понятия и теории, связанные с разработкой решений данных уравнений.