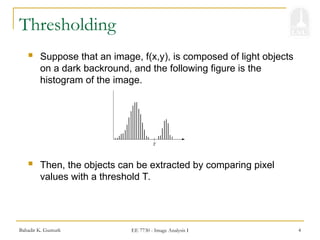
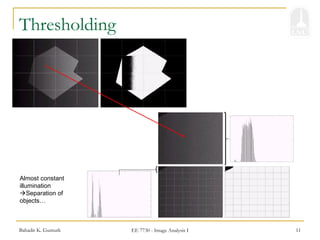
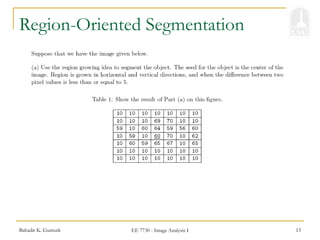
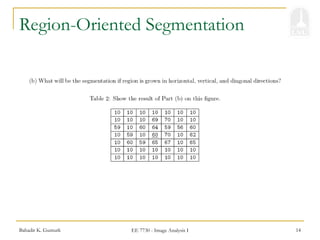
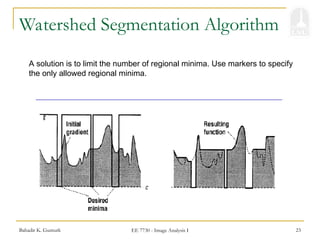
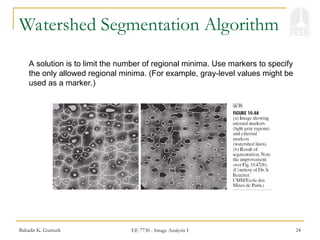
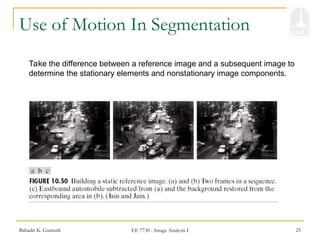
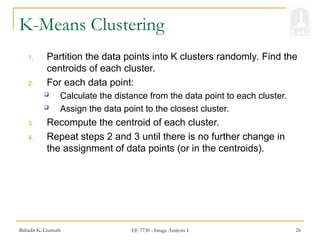
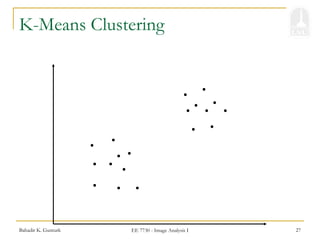
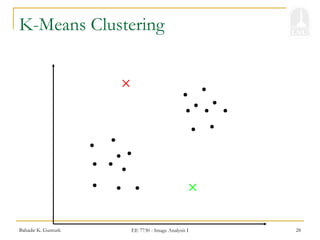
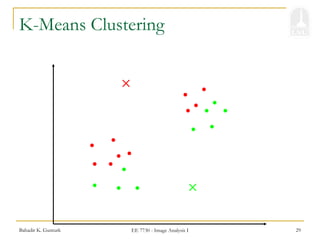
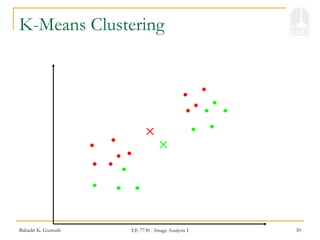
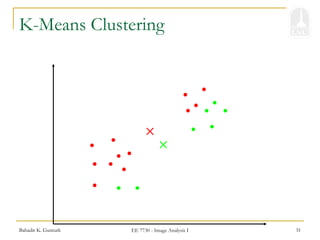
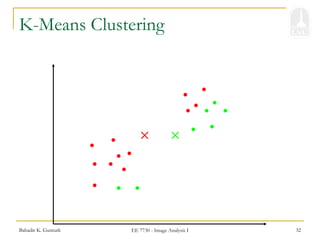
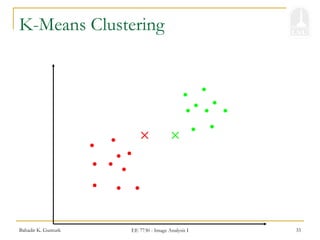
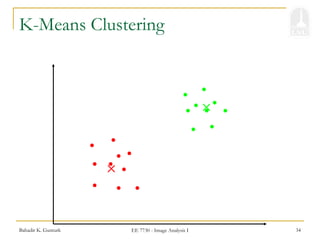
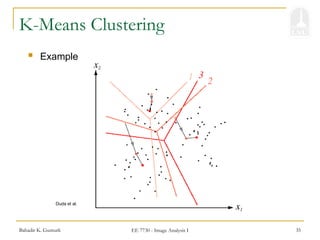
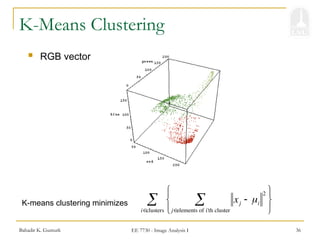
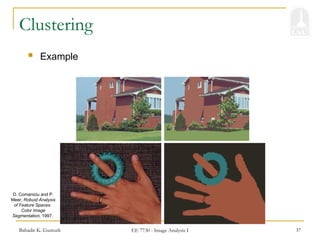
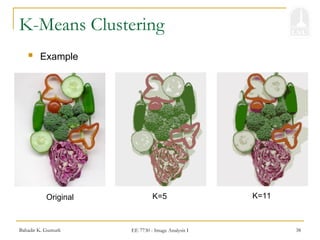
The document discusses image segmentation techniques, which are essential for grouping similar components in images, with applications in medical imaging, surveillance, and video summarization. Key methods include thresholding, region-oriented segmentation, and k-means clustering, each with its specific approaches for handling grayscale and color images. Additionally, the watershed algorithm is described for finding regional minima, while k-means clustering is used to partition data points into clusters based on distance metrics.
![Bahadir K. Gunturk EE 7730 - Image Analysis I 41
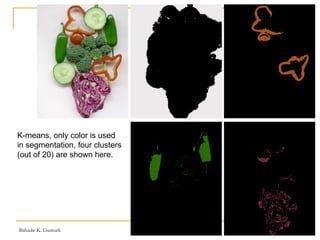
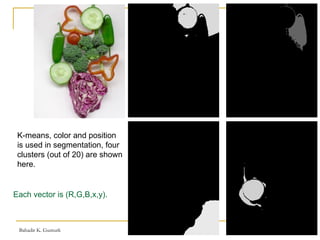
K-Means Clustering: Axis Scaling
Features of different types may have different scales.
For example, pixel coordinates on a 100x100 image vs. RGB
color values in the range [0,1].
Problem: Features with larger scales dominate
clustering.
Solution: Scale the features.](https://image.slidesharecdn.com/l9-240807081937-50be8e27/85/Lecture-on-digital-image-processing-_-unit-I-ppt-41-320.jpg)