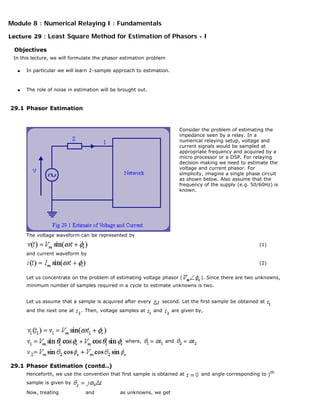
The document discusses phasor estimation using the least squares method. It begins by introducing the problem of estimating voltage and current phasors from sampled signals for use in numerical relays. It then derives the two-sample estimation technique, noting that a minimum of two samples per cycle are needed. Noise is modeled as additive Gaussian noise, and it is shown that noise increases the standard deviation of estimates. More samples are needed to filter out noise and improve accuracy.







































![Circuit Network Analysis - [Chapter2] Sinusoidal Steady-state Analysis](https://cdn.slidesharecdn.com/ss_thumbnails/ch2-150613063856-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)

![RF Circuit Design - [Ch1-1] Sinusoidal Steady-state Analysis](https://cdn.slidesharecdn.com/ss_thumbnails/ch1-1-150613064348-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)