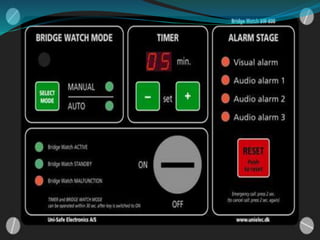
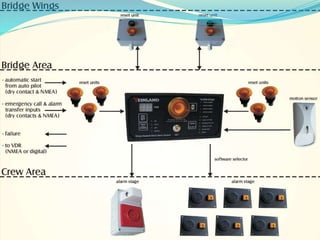
DEAD MAN ALARM
KÖPRÜ ÜSTÜNDE BULUNAN ZABİTİN BAŞINA BİR
ŞEY GELMESİ DURUMUNDA İLK BAŞTA DİĞER
ZABİTLERİN KAMARALARINDA ALARM
ÇALDIRAN, DAHA SONRA TÜM GEMİDE ALARM
ÇALMASINA SEBEP OLAN SİSTEM.
12.
ALDİS LAMBASI
MORSALFABESİ KULLANILACAKKEN
YARARLANILAN KÖPRÜ ÜSTÜ ALETLERİNDENDİR.
BALIKÇILARA UYARI İÇİN DE KULLANILIR.
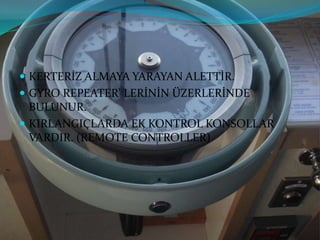
KERTERİZ ALMAYAYARAYAN ALETTİR.
GYRO REPEATER’ LERİNİN ÜZERLERİNDE
BULUNUR.
KIRLANGIÇLARDA EK KONTROL KONSOLLAR
VARDIR. (REMOTE CONTROLLER)
17.
GYRO
GERÇEK KUZEYİGÖSTERİR.
DÜMEN TUTULURKEN GYRO’ YA BAKILIR.
BÜTÜN CİHAZLARA BİLGİLERİ AKTARILIR.
LİMANDA KAPATILMAZ.
GYRO DERECE ENLEMLERİNDEN SONRA GERÇEK
KUZEYİ DOĞRU GÖSTERMEZ.
19.
COURSE RECORDER
PRUVAYIDEĞERİNİ VE SAATİ (GMT) AYARLANIR.
SEYİRE BAŞLANDIĞINDA BU CİHAZ ÇALIŞTIRILIR.
DEMİRDE VE LİMANDA KAYIT EDİLECEK BİR ROTA
OLMADIĞINDAN KAPATILIR.
23.
ECHOSOUNDER
GEMİNİN OMURGASININALTINDA BULUNAN
VERİCİLER-ALICILAR SAYESİNDE OMURGADAN
DİBE OLAN YÜKSEKLİĞİ GÖSTEREN CİHAZDIR.
GENELDE ŞİRKET PROSEDÜRÜ GEREĞİ DERİNLİĞİ
200 m’ DEN AZ OLAN SULARLA ECHOSOUNDER
AÇIK OLMAK ZORUNDADIR.
26.
GPS
GEMİDE 2ADET BULUNUR.
GEMİNİN MEVKİSİNİ, YERE GÖRE HIZINI,
PRUVASINI GÖSTERİR.
VARIATION DEĞERİNE BAKILABİLİR.
NAVTEX
NAVTEX 490KHZ VE 518 KHZ FREKANSLARINDA
ÇALIŞIR.
GENEL OLARAK SEYİRLE İLGİLİ TEHLİKE VE
EMNİYET BİLGİLERİNİ VERİR.
HAVA TAHMİN RAPORLARINI VERİR.
BÖLGE DEĞİŞTİRİLECEĞİ ZAMAN GMDSS’ TEN
BAKILIR. ALRS VOL 5
35.
TEK YÖNLÜOLARAK (KARA İSTASYONUNDAN
GEMİYE) OTOMATİK OLARAK BİLGİ AKIŞI VARDIR.
HF BANDINDAN NAVTEX UYARILARI 4209.5 KHZ
FREKANSINDAN YAYIN YAPILIR. NAVTEX BU
FREKANSTAN MESAJ ALAMAZ.
S BAND
DALGABOYU 10 cm.
AÇIK DENİZLERDE TERCİH EDİLİR.
LİMAN GİRİŞLERİNDE, ÖLÇEĞİ KÜÇÜK OLAN
YERLERDE TERCİH EDİLİR.
54.
X BAND
DALGABOYU 3 CM’ DİR.
SART BU RADAR TİPİNDE GÖRÜNÜR.
SART 12 NOKTA İLE GÖZÜKÜR.
56.
VDR
RADAR’ DANAIS’ TEN GYRO’ DAN COURSE
RECORDER’ DAN BİLGİLERİ KAYIT EDER.
GEMİNİN KARA KUTUSUDUR.
KÖPRÜ ÜSTÜNDEKİ SESLERİ KAYIT EDER.
HER ZAMAN AÇIK OLMAK ZORUNDA.
KUTUSU MİYARDA, HİDROSTATİK KİLİTLE
BAĞLIDIR.
RENGİ GENELDE TURUNCUDUR.