YÜZEN CİSİMLERİN DENGESİVE STABİLİTESİ
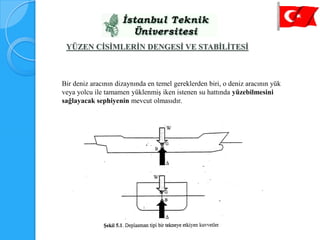
Bir deniz aracının dizaynında en temel gereklerden biri, o deniz aracının yük
veya yolcu ile tamamen yüklenmiş iken istenen su hattında yüzebilmesini
sağlayacak sephiyenin mevcut olmasıdır.
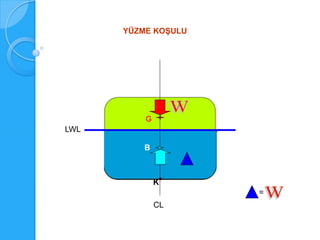
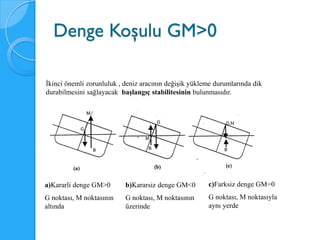
Denge Koşulu GM>0
İkinciönemli zorunluluk , deniz aracının değişik yükleme durumlarında dik
durabilmesini sağlayacak başlangıç stabilitesinin bulunmasıdır.
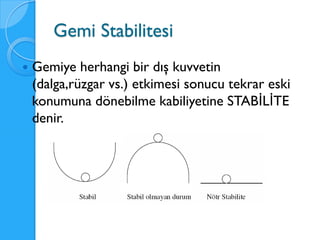
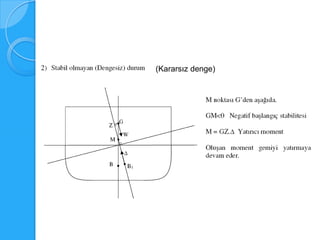
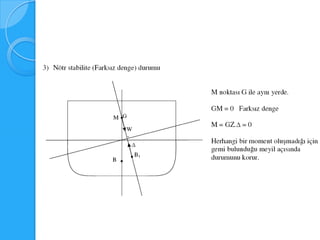
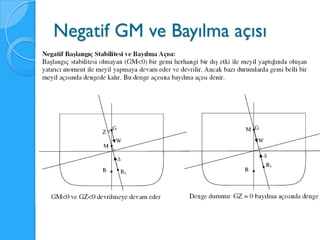
a)Kararli denge GM>0 b)Kararsiz denge GM<0 c)Farksiz denge GM=0
G noktası, M noktasının G noktası, M noktasının G noktası, M noktasıyla
altında üzerinde aynı yerde
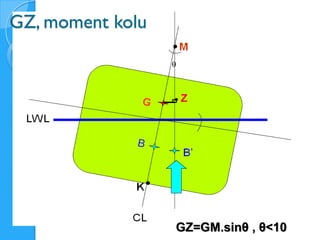
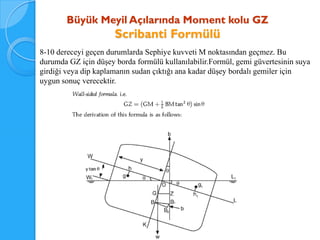
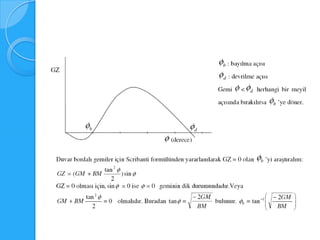
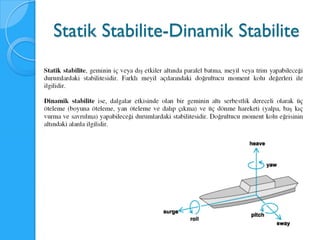
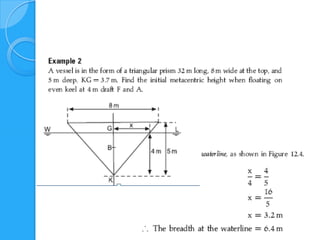
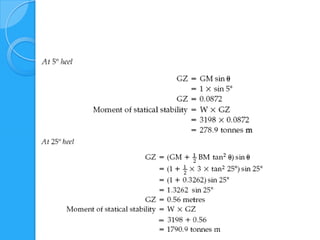
Büyük Meyil AçılarındaMoment kolu GZ
Scribanti Formülü
8-10 dereceyi geçen durumlarda Sephiye kuvveti M noktasından geçmez. Bu
durumda GZ için düşey borda formülü kullanılabilir.Formül, gemi güvertesinin suya
girdiği veya dip kaplamanın sudan çıktığı ana kadar düşey bordalı gemiler için
uygun sonuç verecektir.
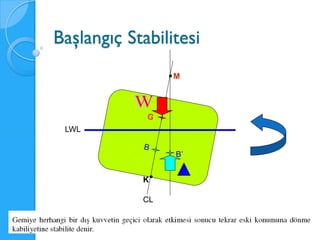
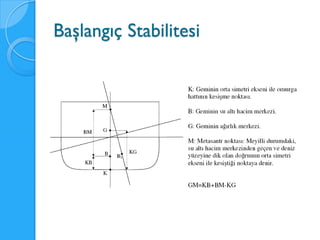
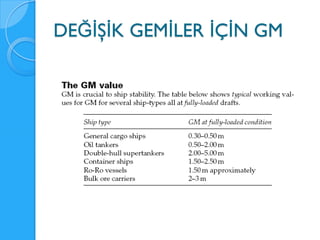
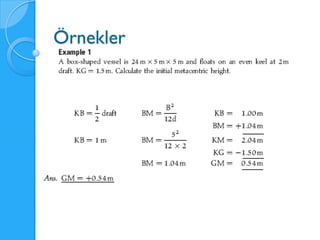
BAŞLANGIÇ STABİLİTESİ
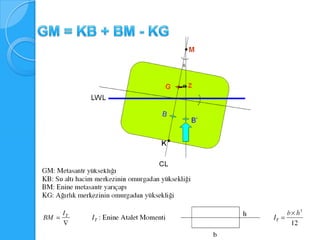
GM= KB+BM-KG > 0
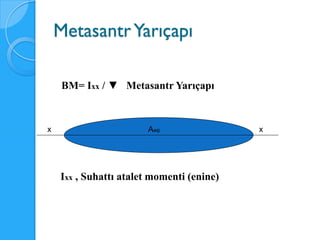
GM enine metesantr yüksekliği olmak üzere, KB (hacim merkezinin omurgadan
yüksekliği) ve BM (enine metesantr yarıçapı) hidrostatik hesaplardan elde edilir.
KB ve BM gemi geometrisine bağlı olarak iyileştirilebilinir.
KG (ağırlık merkezinin omurgadan yüksekliği) mevcut duruma göre hesapedilerek
bulunur.
KG başlangıç stabilitesini negatif etkiledigi için bu değerin düşük olması istenir,
bunun için:
1.Gemideki ağırlık grupları daha aşağı indirilebilir
2.Ağırlık merkezinden aşağıya balast suyu alınabilir
3.Üst yapıda aliminyum gibi hafif malzeme kullanılabilir
4.Gemi içindeki serbest yüzey miktarı azaltılabilir
22.
Stiff ve TenderGemi
Stiff Gemi: (Büyük GM)
Gemilerde ambar diplerine ağır yük alındığı zaman GM büyür, dolayısıyla
doğrultucu kol olan GZ'de büyük olur.
Bu gemilerde yüksek GM’lerinden dolayı denge sorunu yoktur ama
yalpaya düştüklerinde çok çabuk doğrularak geminin ve yükün
yıpranmasına ve personelin rahatsız olmasına neden olurlar.
Kütük demir ve ağır maden yükleyen gemiler bu özelliği taşır.
Tender gemi: (Küçük GM)
Fazla yer kaplayan, hafif yükleri taşıyan gemilerdir. GM küçük olur.
Dolayısıyla doğrultucu kol olan GZ de küçük olur.
Bu gemiler yalpaya düştüklerinde yavaş yavaş doğrulurlar. Bu sayede gemi
ve yük hasar görmez, personel de rahatsız olmaz. Buna karşılık bu tür
yüklenmiş gemilerde denge sorunu vardır. Başlangıçta zaten küçük olan
GM, sefer süresince daha da küçülerek, gemiyi tehlikeli durumlara
düşürebilir, hatta batırabilir.
Kereste ve tahıl yükleyen gemilerle, konteyner gemileri tender gemilerdir.