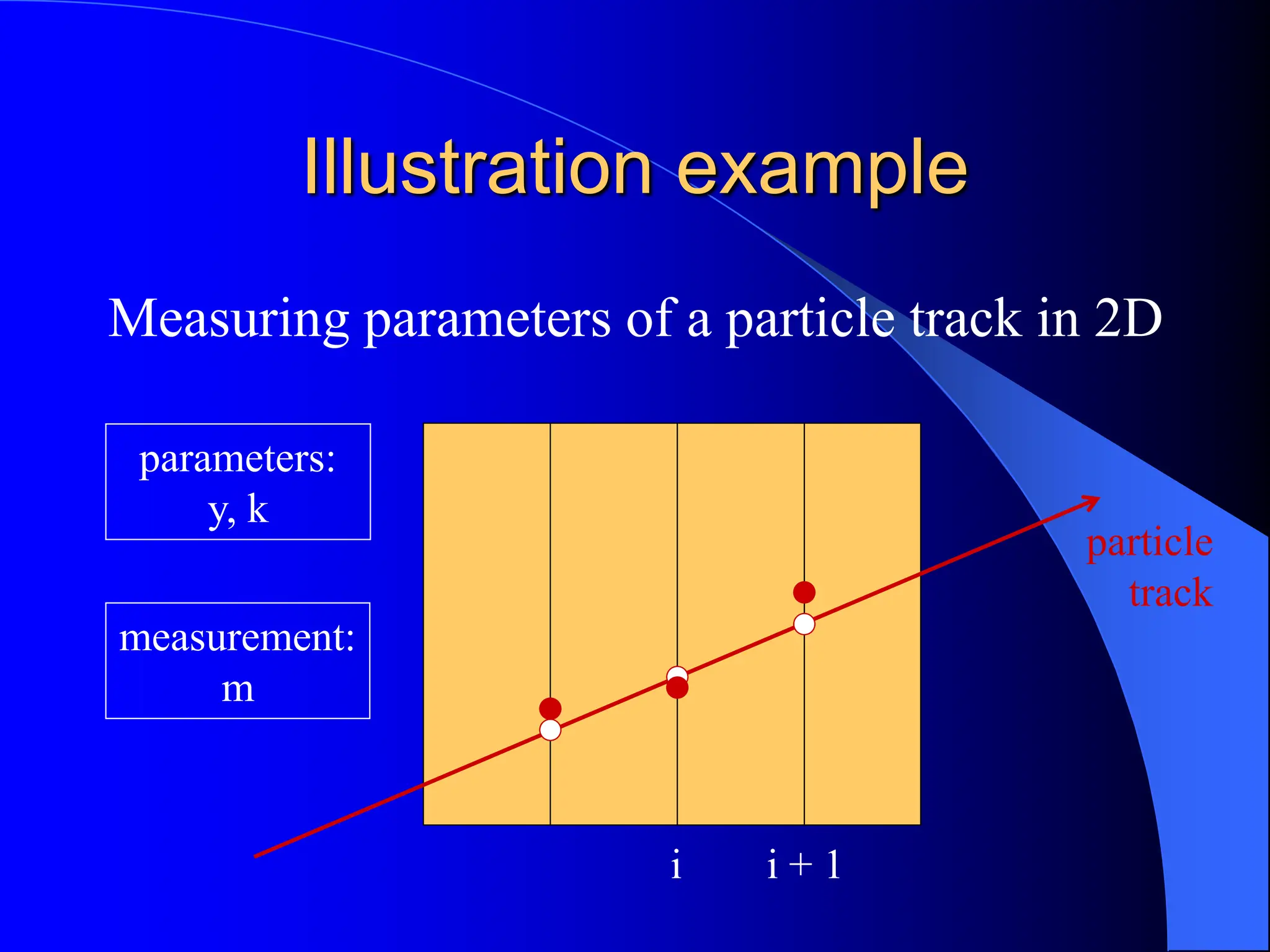
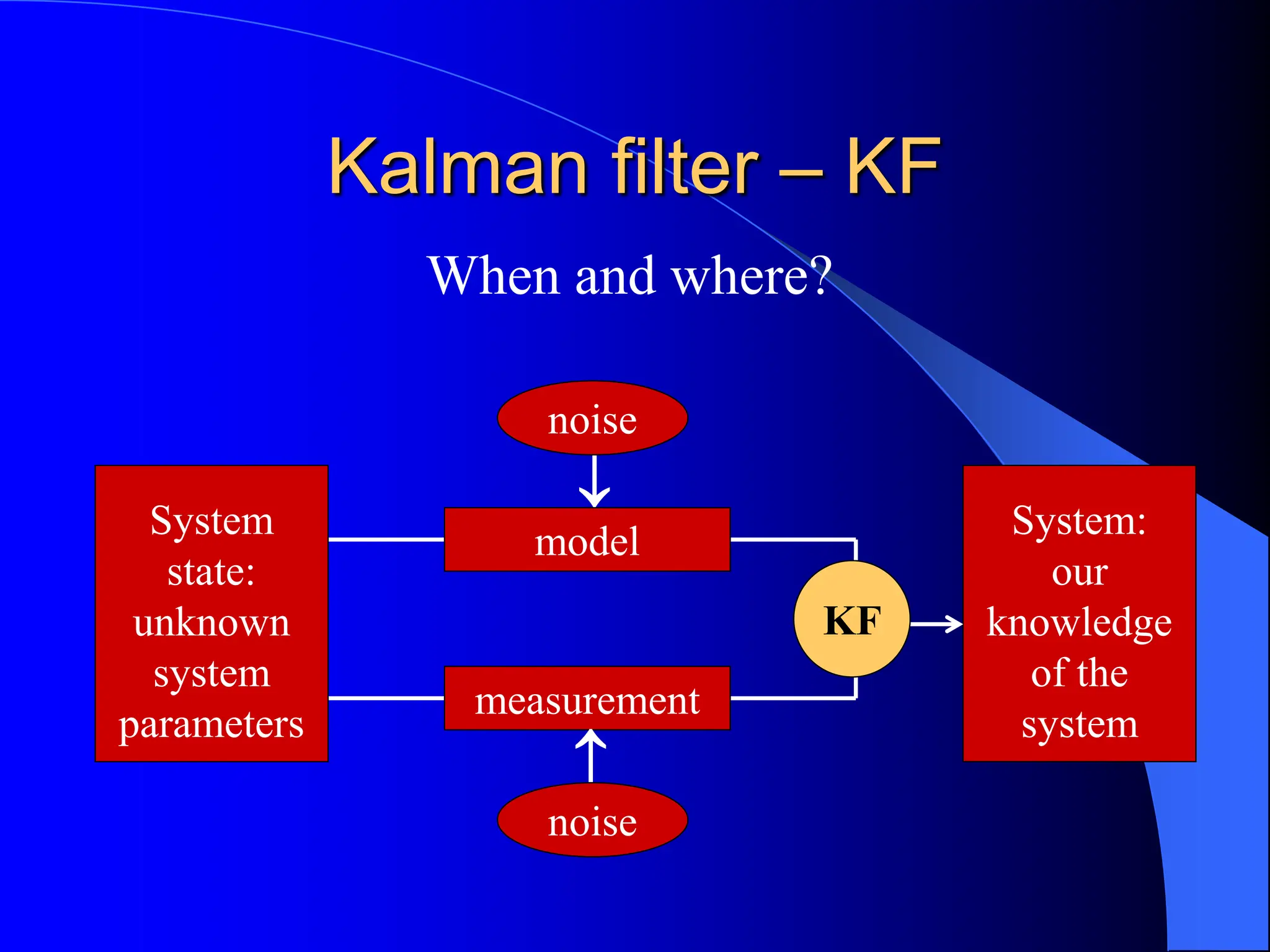
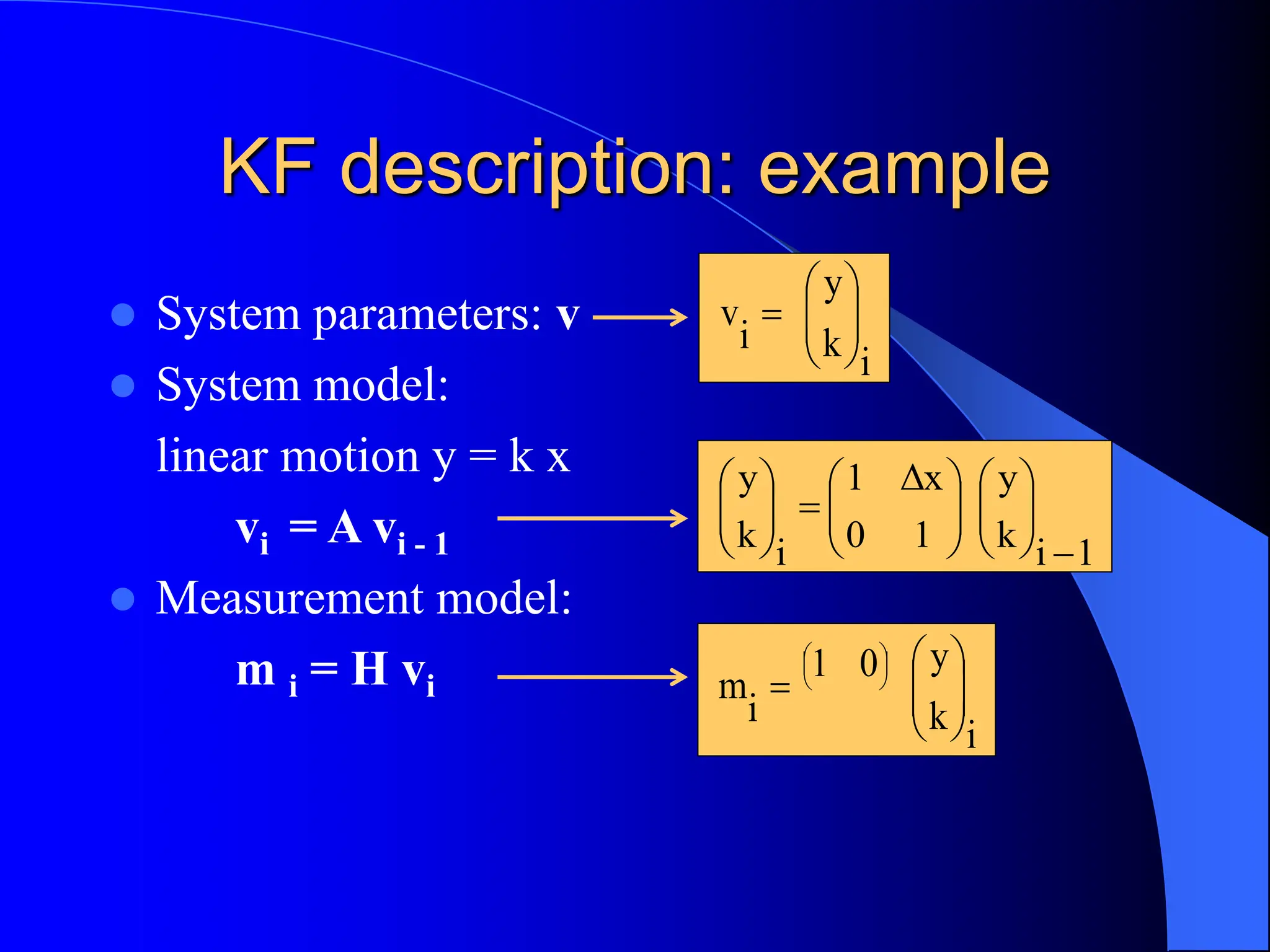
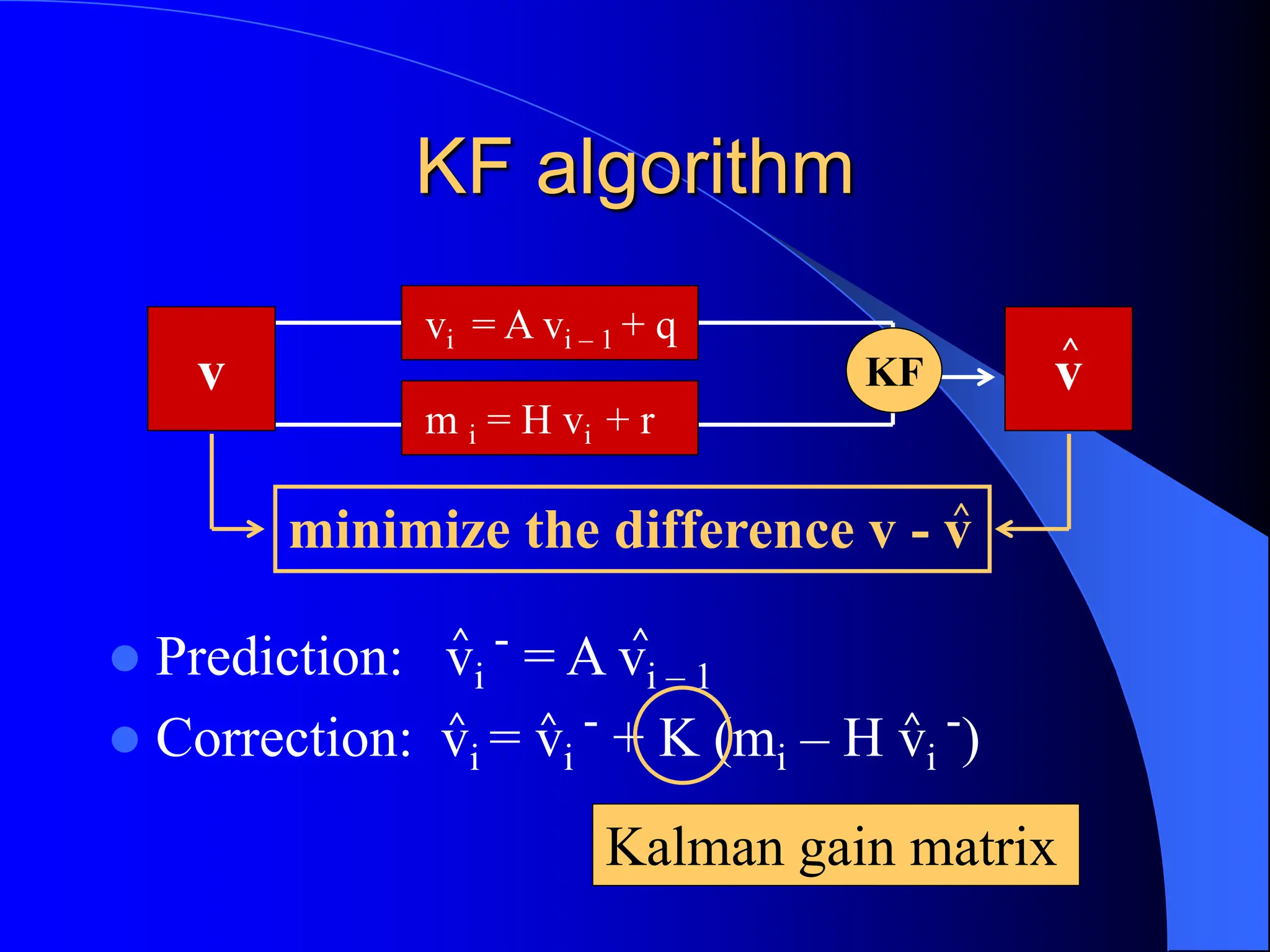
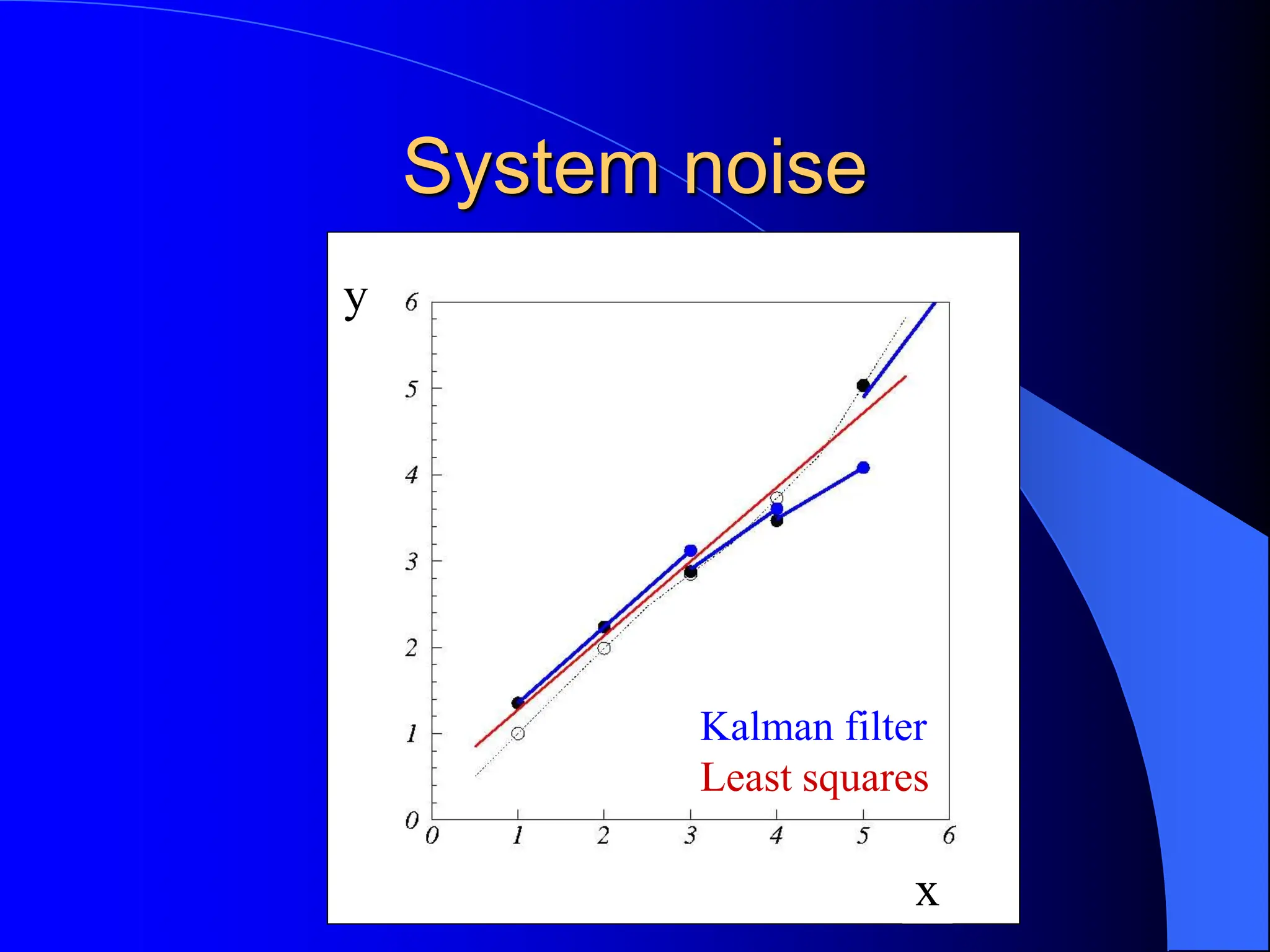
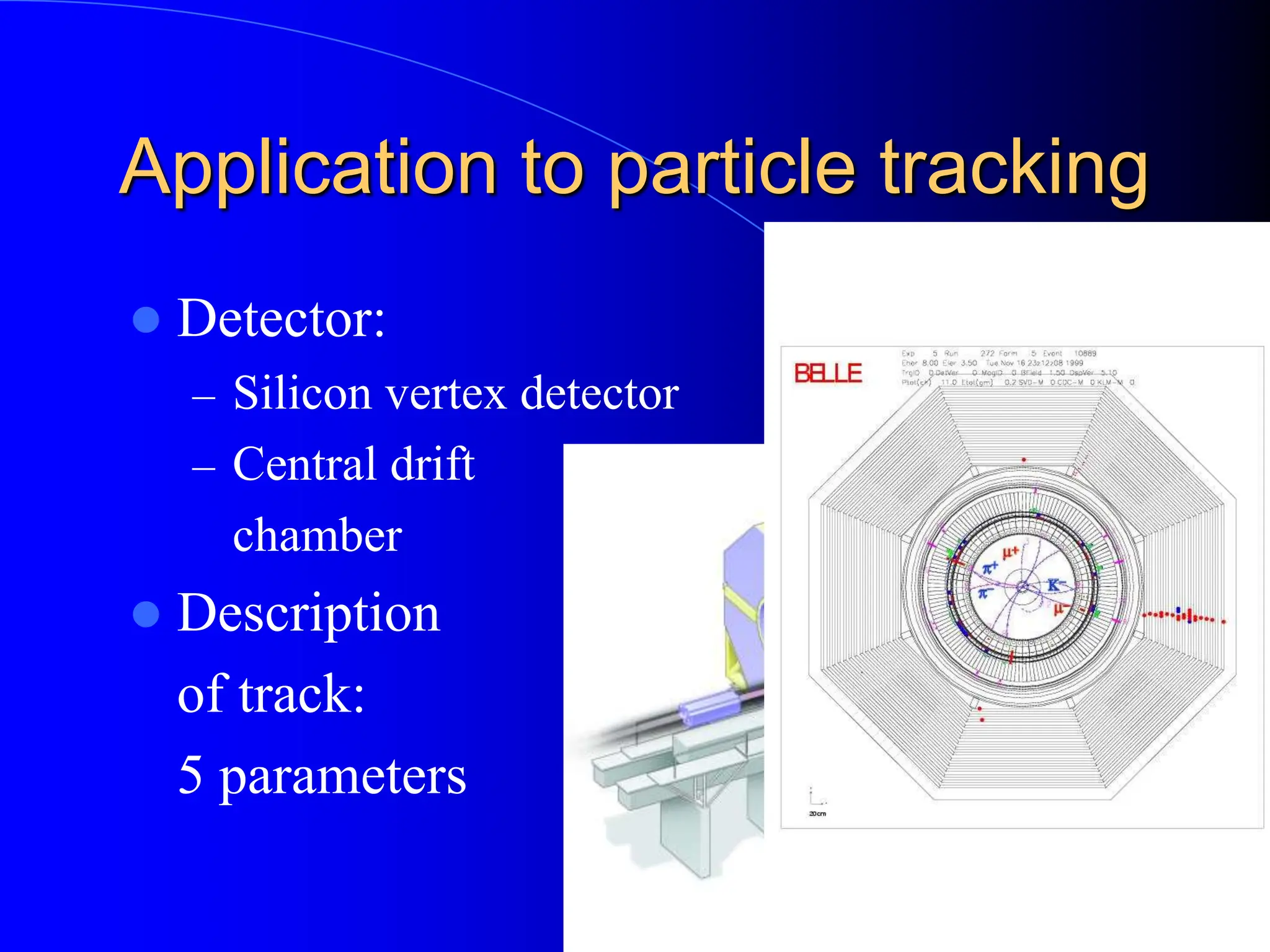
The document discusses the application of the Kalman Filter for tracking particles, outlining its basic principles, advantages, and examples of use in various settings like missile tracking and high-energy physics experiments. It explains the filtering process through prediction and correction steps, the handling of noise, and modifications for non-linear systems. The conclusion emphasizes the effectiveness and extensive application of the Kalman Filter in tracking methodologies.