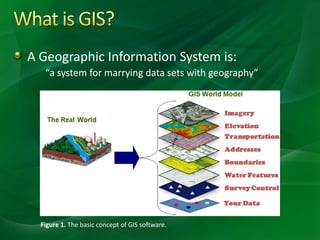
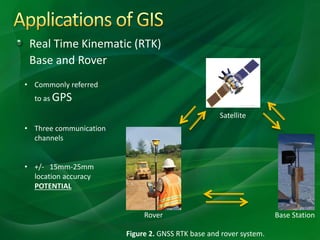
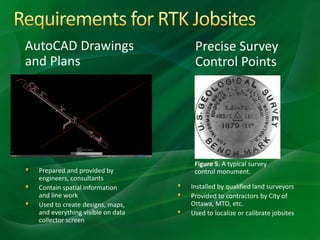
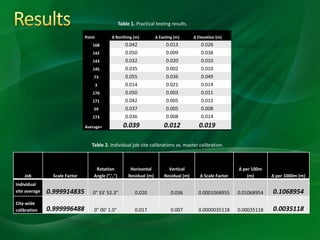
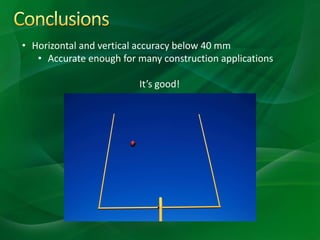
The document discusses using RTK GPS technology to create a digital file that calibrates a major portion of Ottawa's geography. This eliminates the need to calibrate individual job sites for each new project, saving time. The document defines GIS, describes how RTK GPS systems work with a base station and rover, and provides examples of surveying applications. It then outlines the project to find a reliable network of control points, measure them in, and test the results, which achieved horizontal and vertical accuracy below 40mm. Calibrating the entire city was found to be more accurate and time efficient than calibrating individual sites.