The document discusses the introduction to neural networks and fuzzy logic, focusing on fuzzy control and its operations, such as fuzzification, inference, and defuzzification. It outlines the definitions and applications of fuzzy membership functions, fuzzy rules, and various operators for creating a fuzzy control system. Additionally, it includes examples and homework assignments related to driving scenarios that utilize fuzzy logic principles.

![President University Erwin Sitompul NNFL 10/20
Homework 10
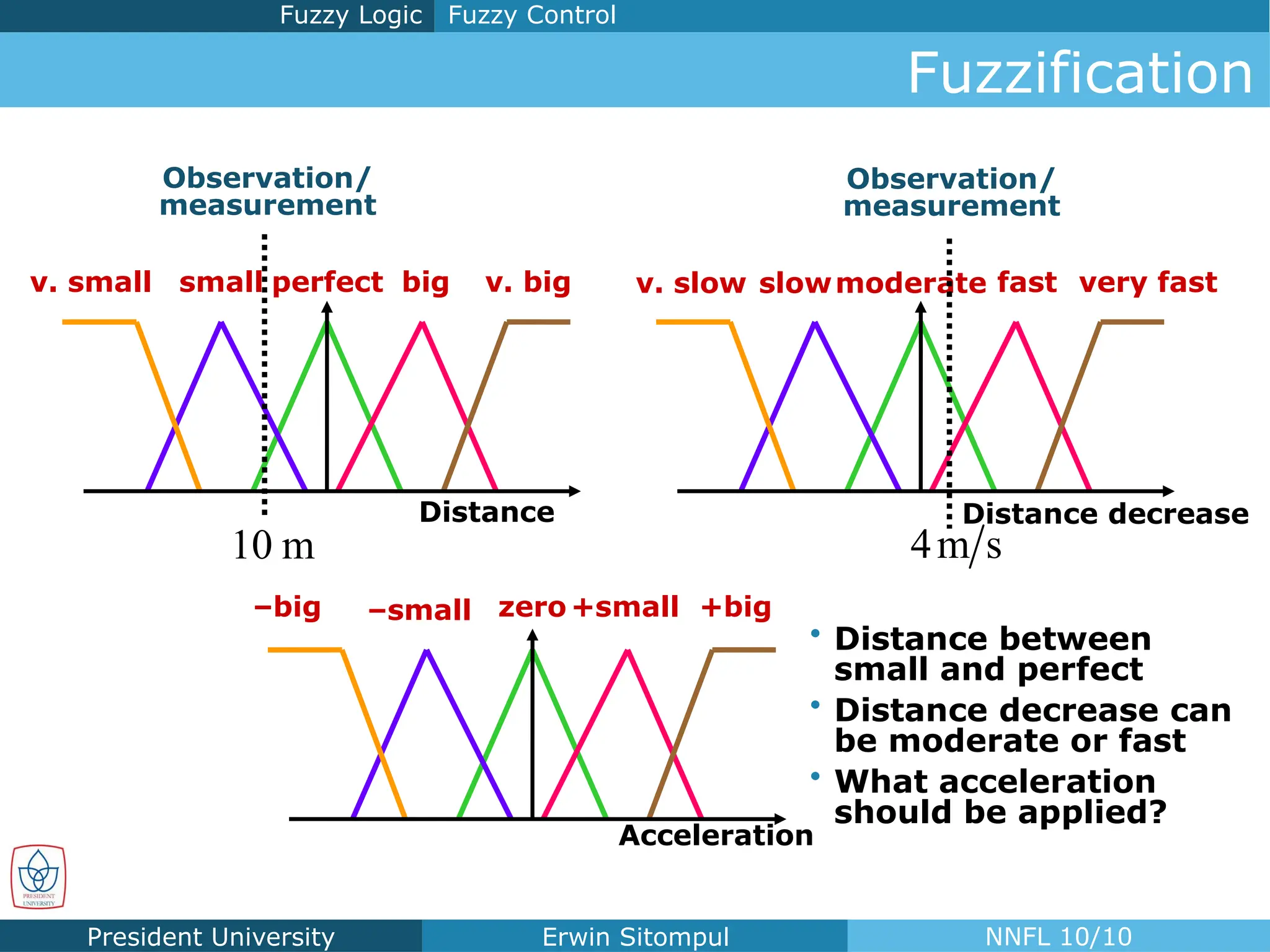
v. small
Distance to next car [m]
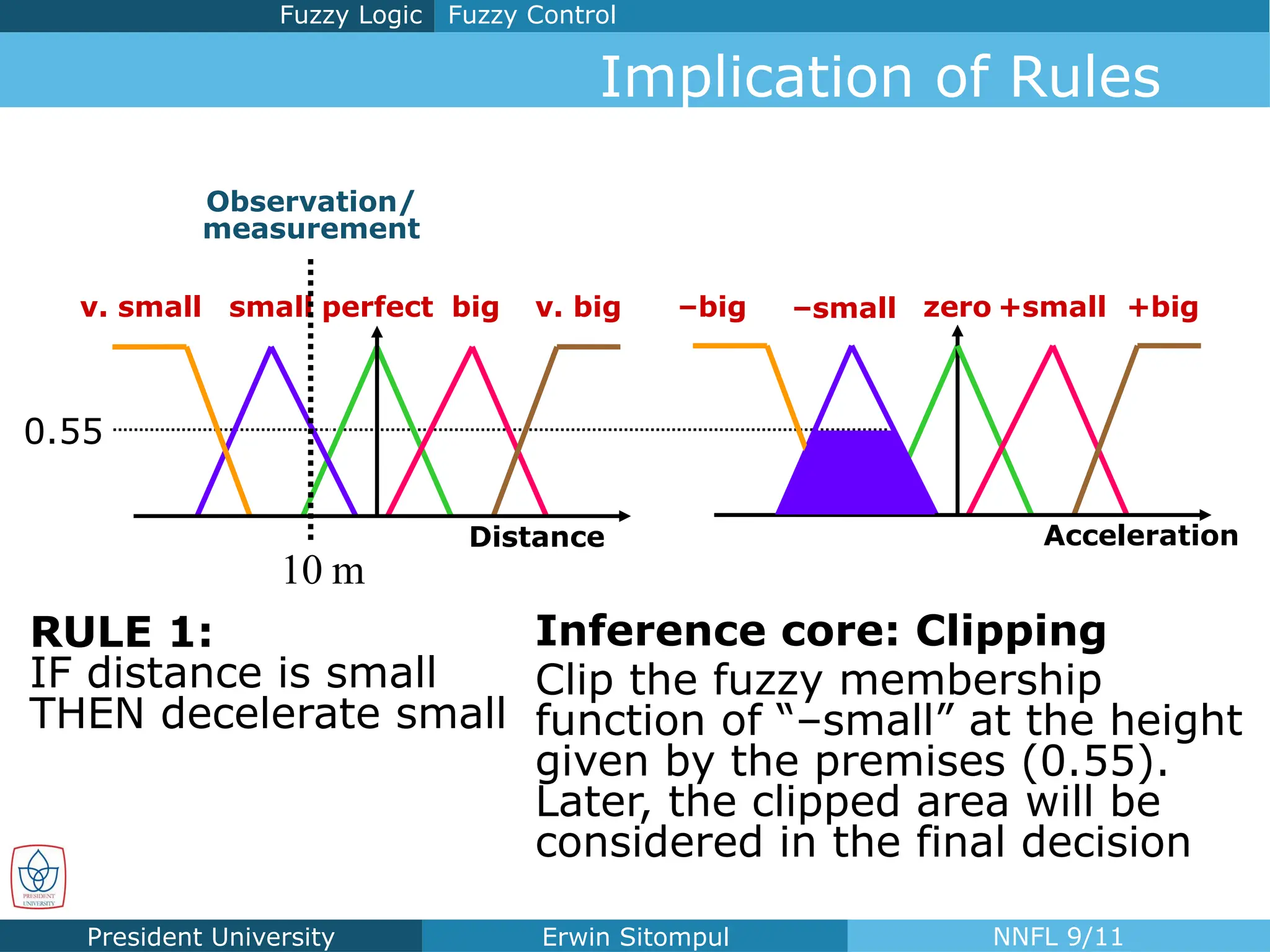
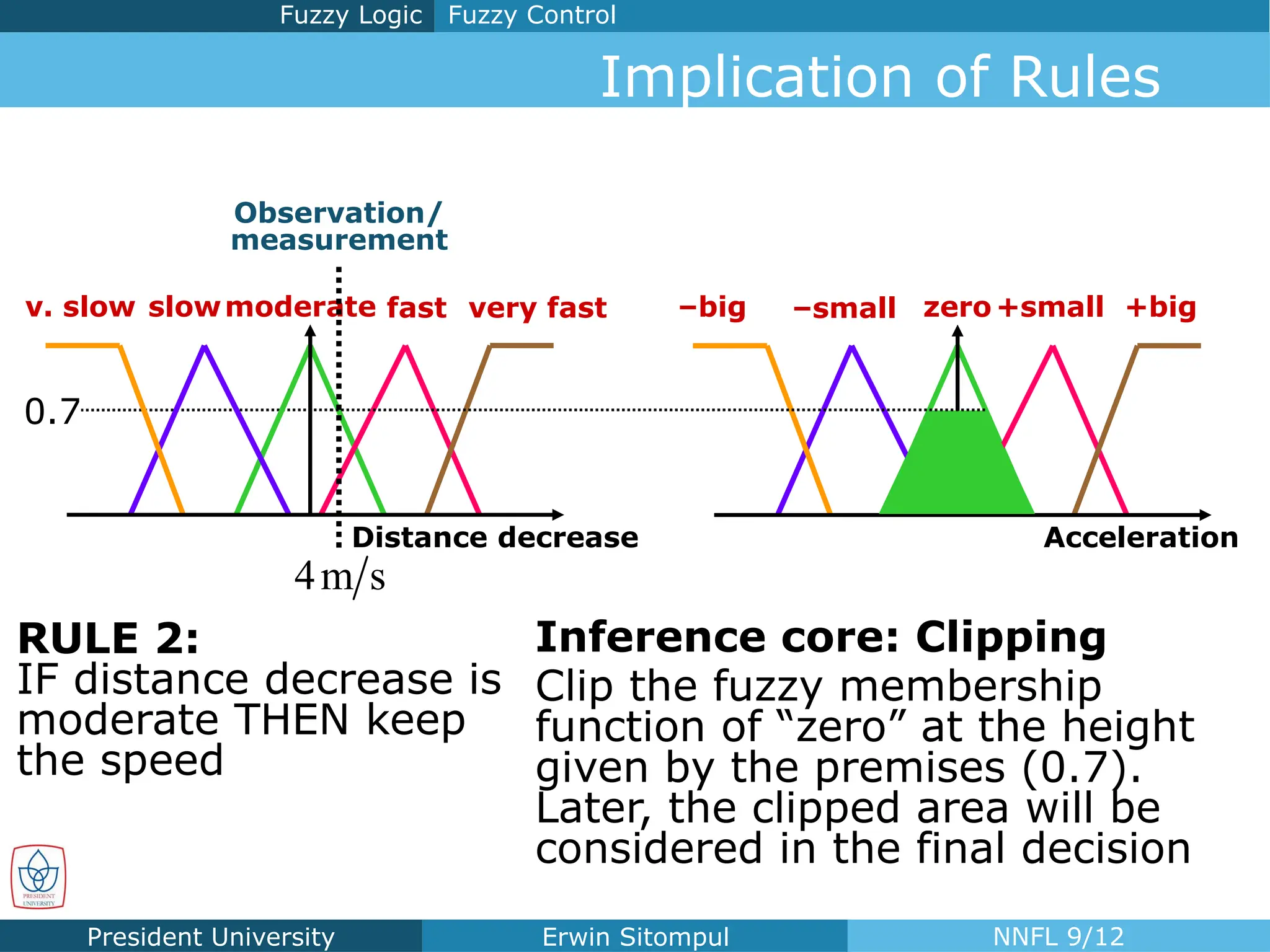
small perfect big v. big
0 5 10 15 20 25
1
Speed change [m/s2
]
constant growing
declining
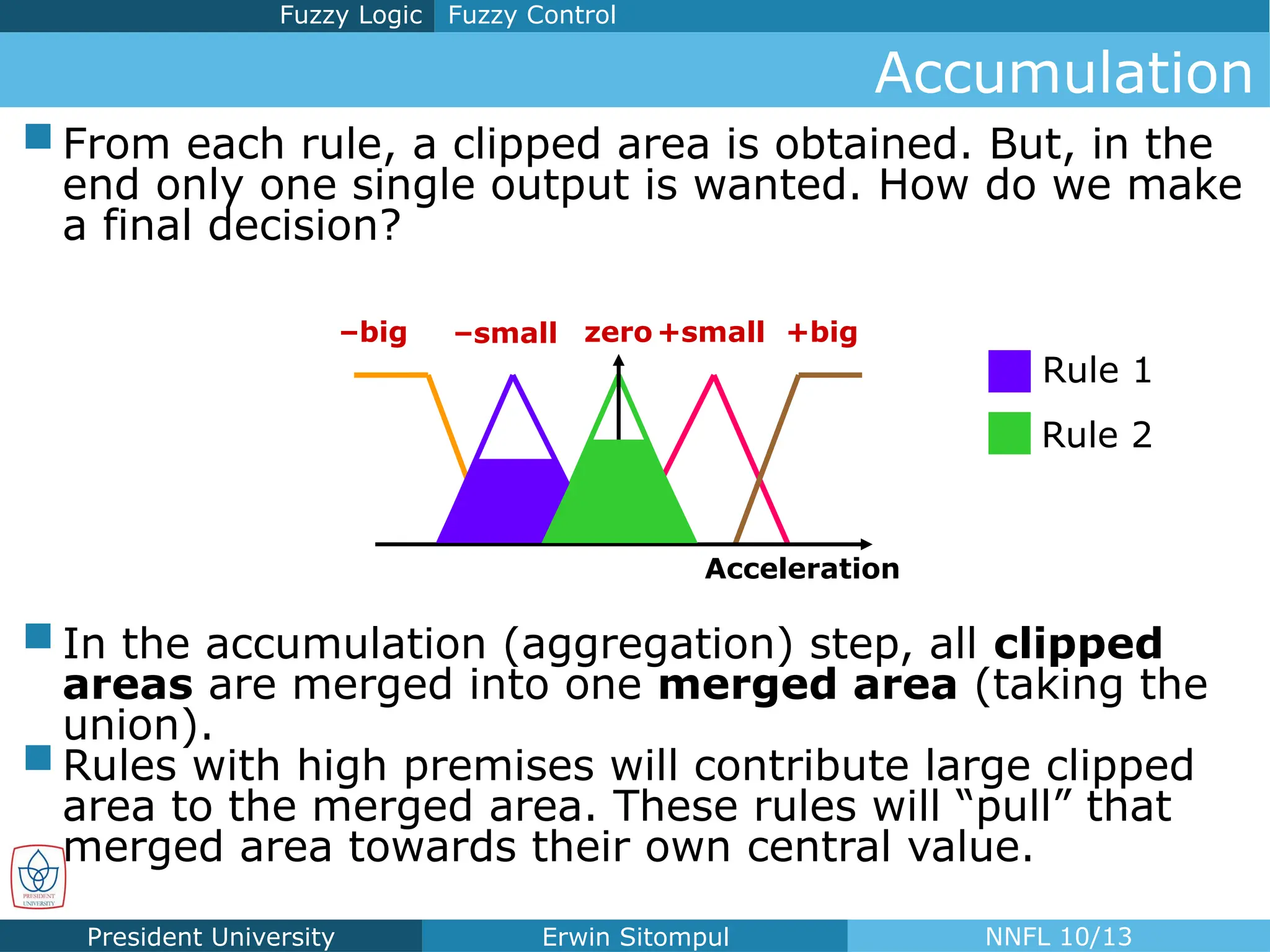
–small zero +small +big
–big
Acceleration adj. [m/s2
]
–2 –1 0 1 2
1
–10 –5 0 5 10
1
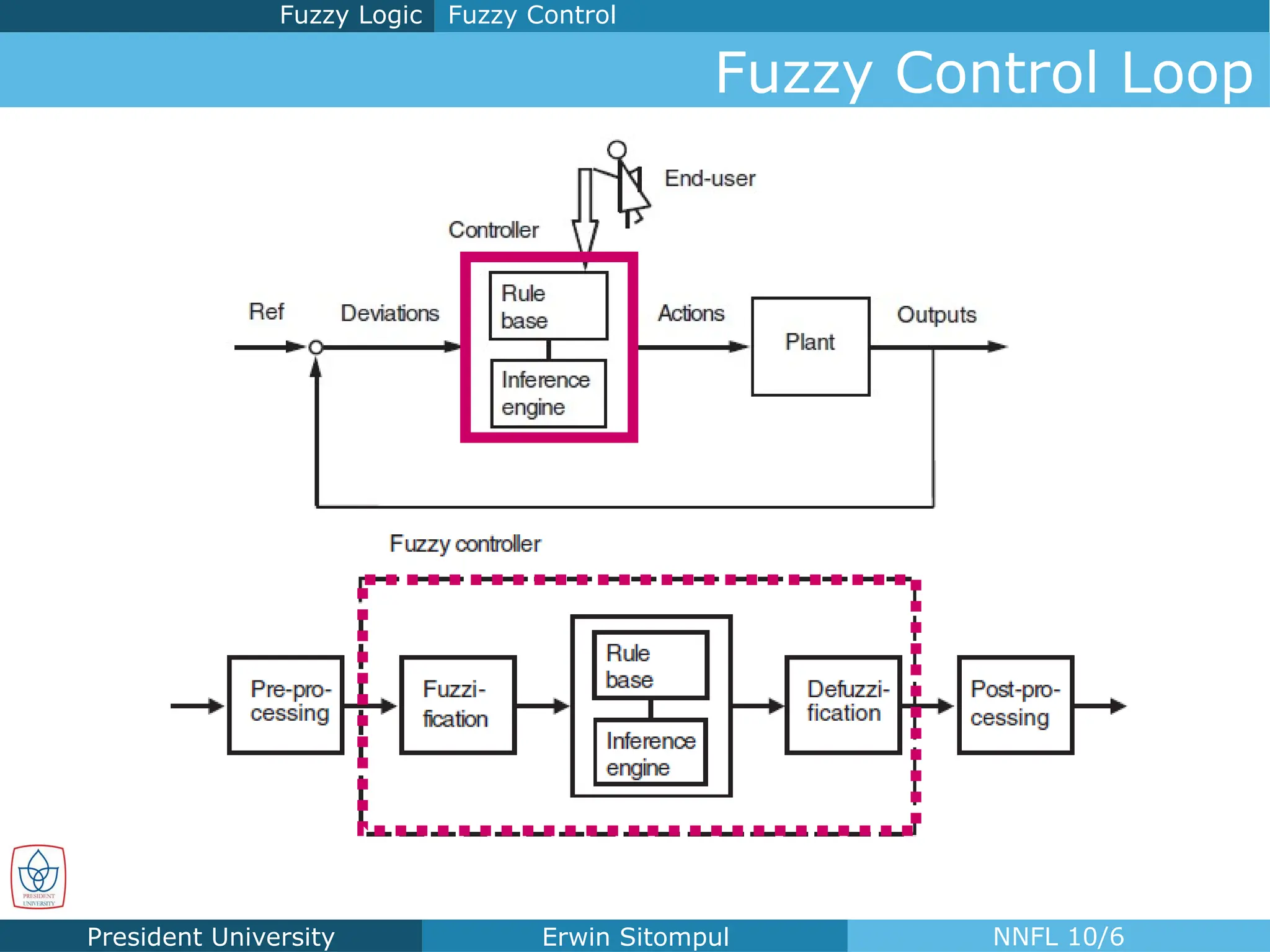
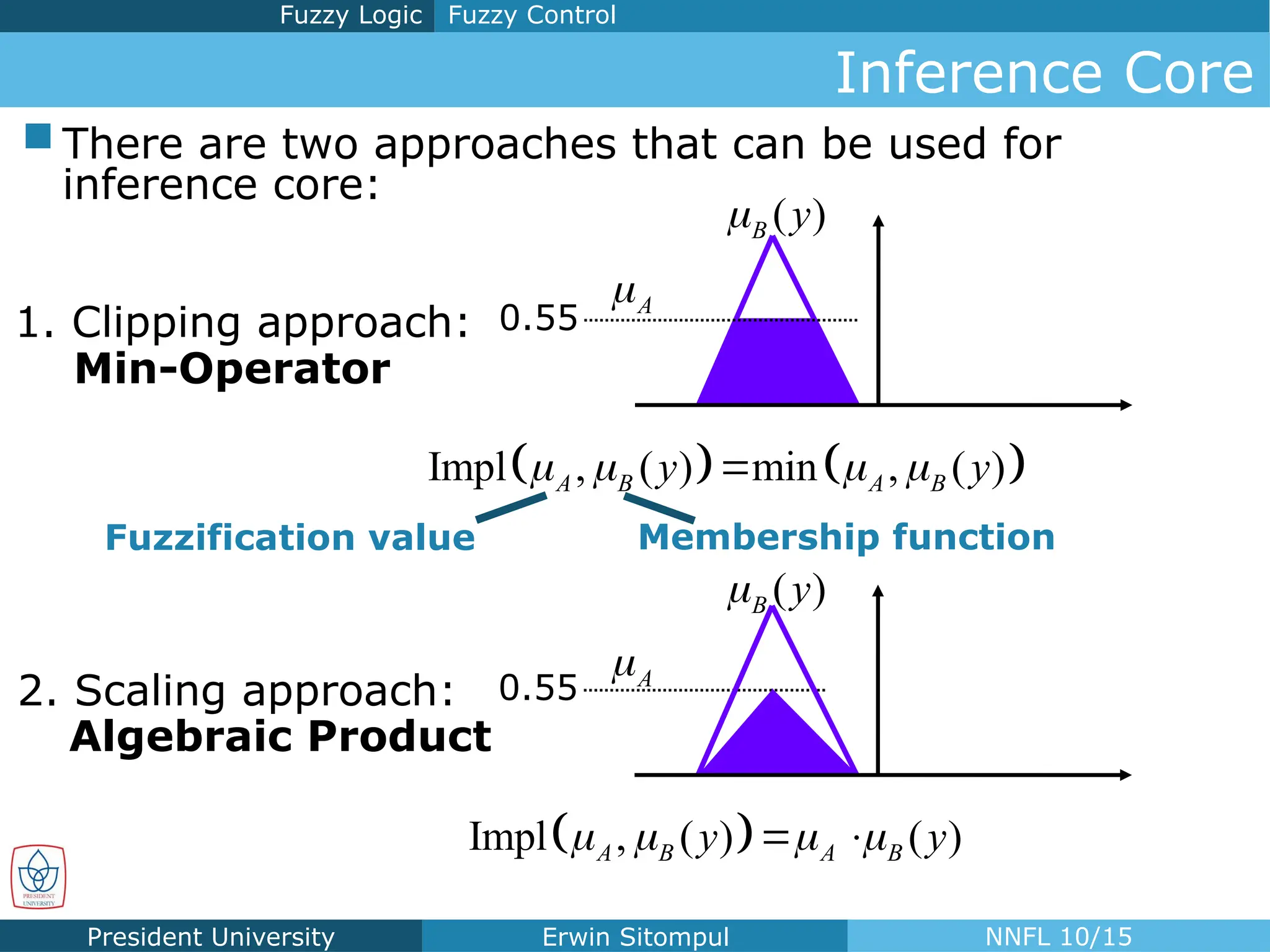
Fuzzy Control
Fuzzy Logic
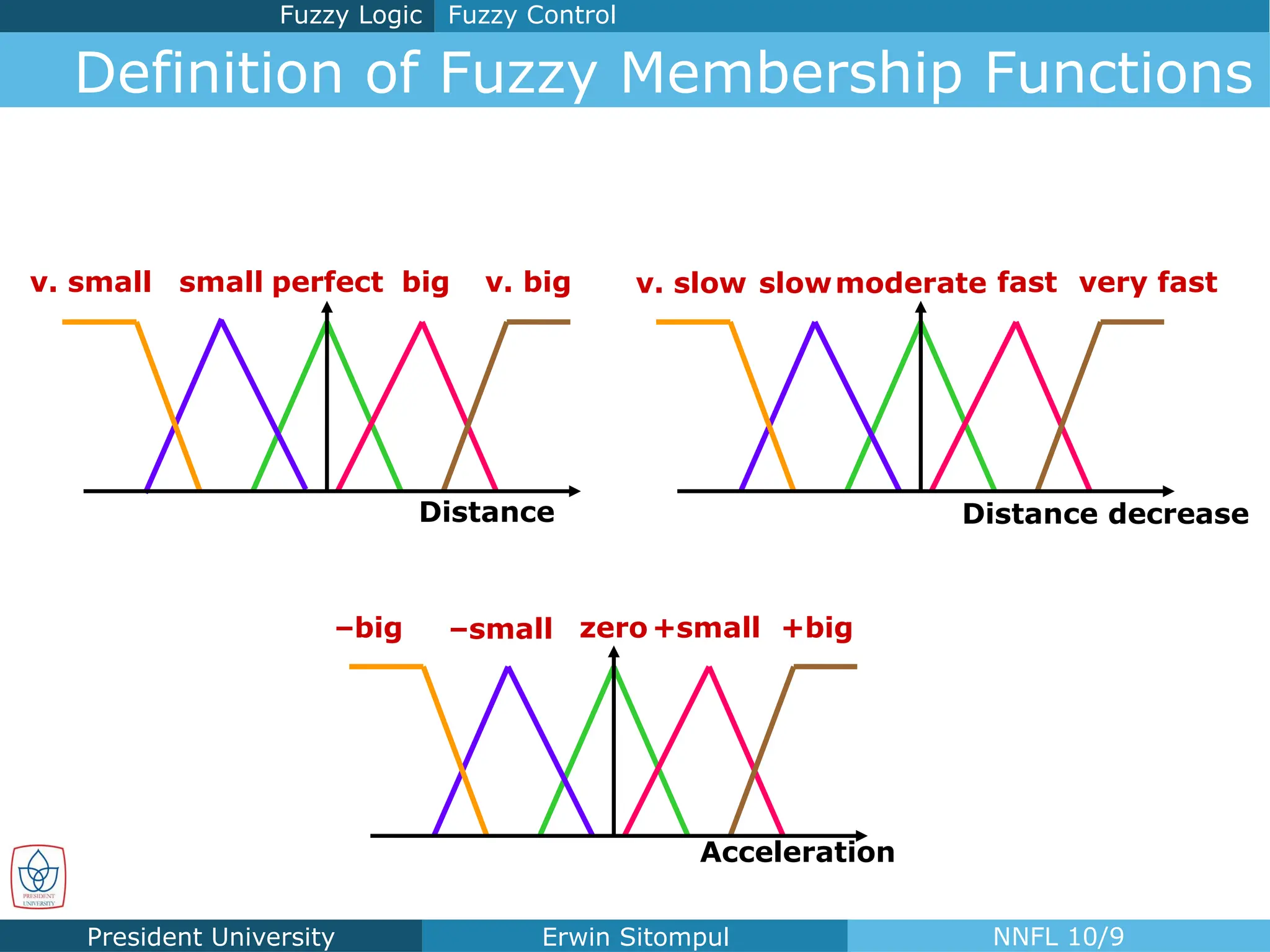
A fuzzy controller is to be used in driving a car. The
fuzzy membership functions for the two inputs and one
output are defined as below.](https://image.slidesharecdn.com/nnfl-1002-241105203831-bae1eef0/75/Introduction-to-Neural-Networks-and-Fuzzy-Logicnnfl-1002-pptx-20-2048.jpg)