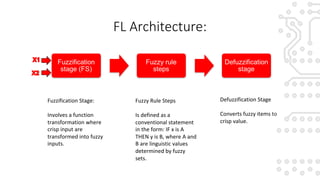
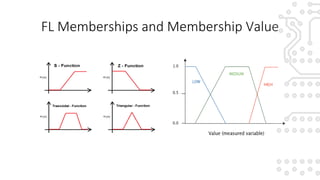
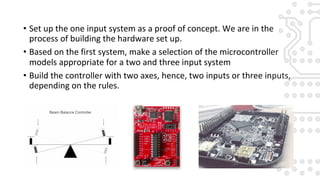
This document summarizes research on implementing fuzzy logic controllers using microcontrollers. It describes using lookup tables and function development to realize fuzzy logic systems on two microcontrollers, the MSP430 from Texas Instruments and Kinetis from NXP. The methodology involves studying fuzzy logic design, understanding microcontrollers, and implementing and testing fuzzy controller systems using the microcontrollers. Membership functions, rules, and defuzzification processes are programmed. Future work aims to expand the proof of concept single input system to two and three input systems for applications like quadcopter stabilization.