Download to read offline



![President University Erwin Sitompul NNFL 6/5
Solution: Homework 5 (Cont.)
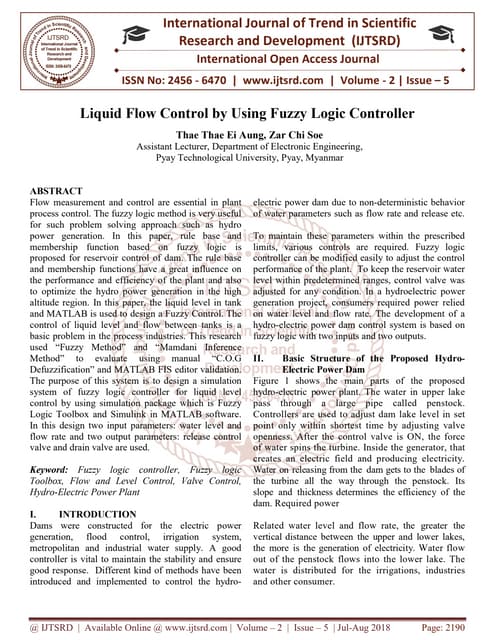
Fuzzy Control
Fuzzy Logic
Valve control signal [%/s]
–30 –20 –10 0 10 20 30
1
Rate of level error [cm/s]
zero positive
negative
–4 –0.5 0 0.5 4
1
Level error [cm]
zero positive
negative
–5 –4 0 4 5
1
1st Set of Membership Functions](https://image.slidesharecdn.com/nnfl-230314002443-2f2b77f8/85/nnfl-0620-pptx-5-320.jpg)

![President University Erwin Sitompul NNFL 6/7
Solution: Homework 5 (Cont.)
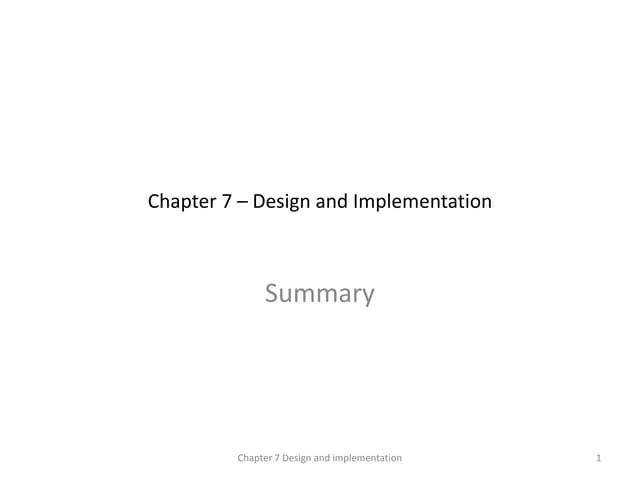
Fuzzy Control
Fuzzy Logic
Level error [cm]
zero positive
negative
–5 -1 0 1 5
1
2nd Set of Membership Functions
Valve control signal [%/s]
–30 –20 –10 0 10 20 30
1
Rate of level error [cm/s]
zero positive
negative
–4 –0.5 0 0.5 4
1](https://image.slidesharecdn.com/nnfl-230314002443-2f2b77f8/85/nnfl-0620-pptx-7-320.jpg)
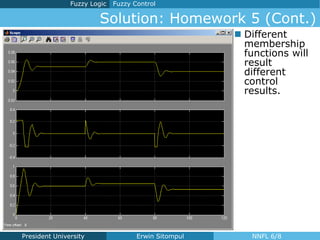
![President University Erwin Sitompul NNFL 6/9
Solution: Homework 5 (Cont.)
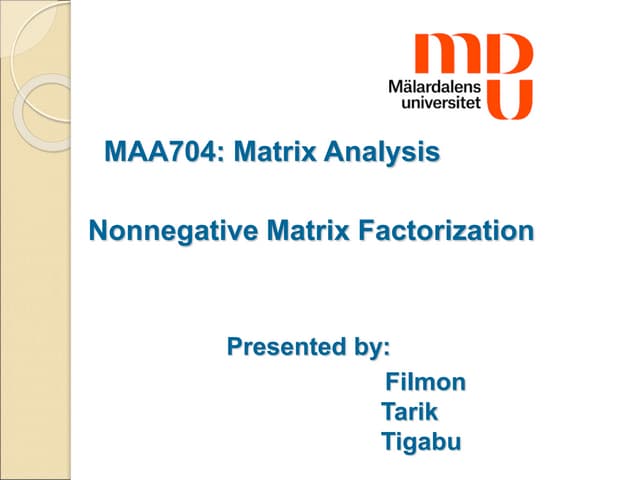
Fuzzy Control
Fuzzy Logic
Level error [cm]
zero positive
negative
–10 –? 0 ? 10
1
3rd Set of Membership Functions
Valve control signal [%/s]
–30 –20 –10 0 10 20 30
1
Rate of level error [cm/s]
zero positive
negative
–4 –0.5 0 0.5 4
1](https://image.slidesharecdn.com/nnfl-230314002443-2f2b77f8/85/nnfl-0620-pptx-9-320.jpg)

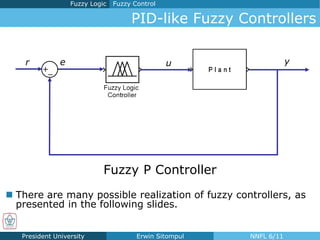







This document summarizes a lecture on neural networks and fuzzy logic. It discusses fuzzy control systems and different methods for fuzzy control, including using fuzzy logic to mimic proportional-integral-derivative controllers. Various membership functions are presented and it is noted that using different membership functions can result in different control system behaviors. PID-like fuzzy controllers are explored, including fuzzy proportional, fuzzy proportional-derivative, and fuzzy proportional-derivative-integral controllers.