This document discusses different methods of interpolation, including Newton's divided-difference interpolating polynomials and Lagrange interpolating polynomials. Newton's method uses finite divided differences to determine the coefficients of a polynomial that fits a set of data points exactly. Lagrange's method expresses the interpolating polynomial as a weighted sum of basis polynomials, where each basis polynomial passes through one data point. The document also provides an example of using Newton's method to interpolate logarithm values and estimates the logarithm of 2. Image interpolation techniques like Radon reconstruction are discussed, which reconstruct an image from its projections by approximating the inverse Radon transform.
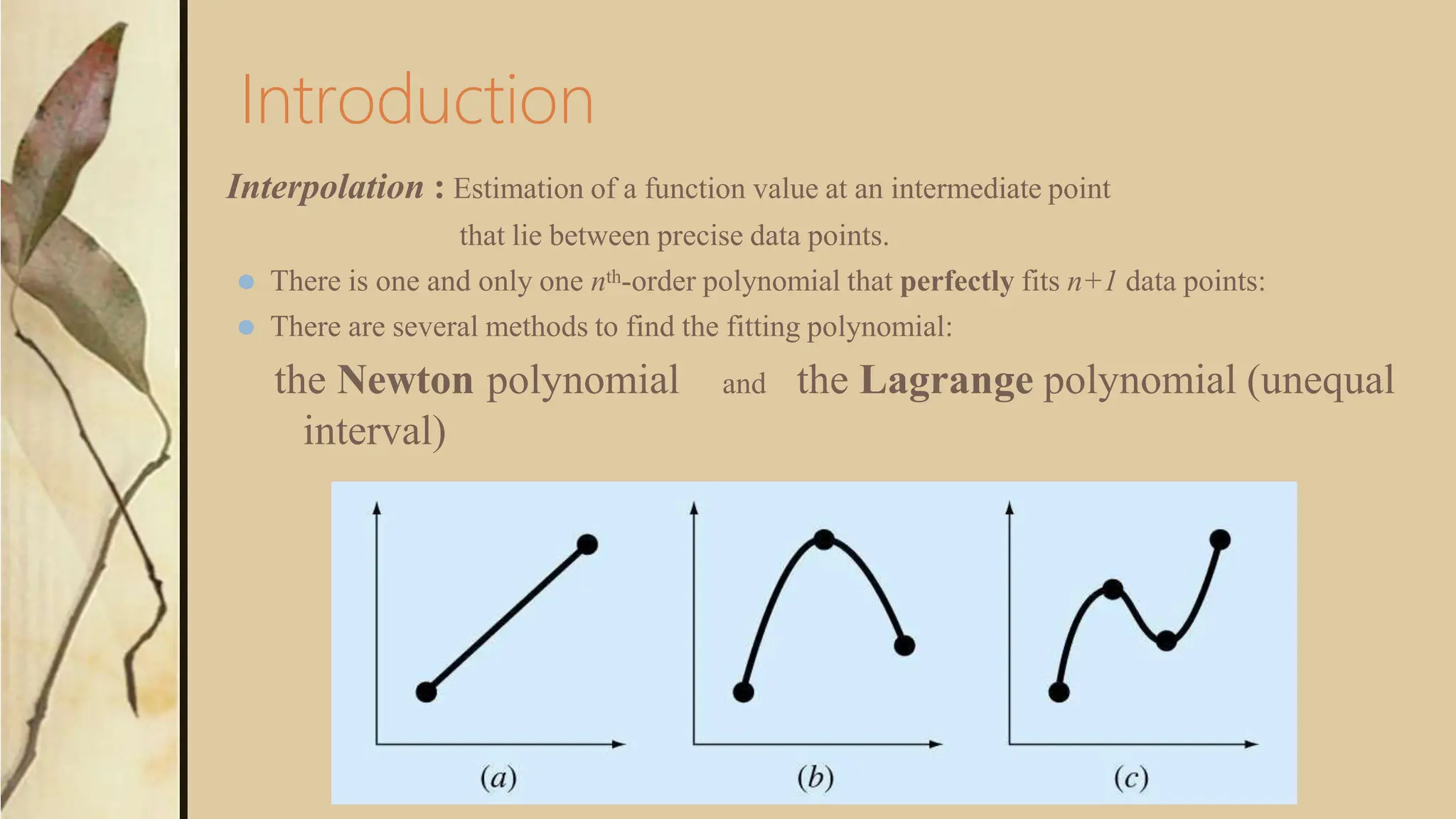
![General Form of Newton’s Interpolating
Polynomials
xi xj
f (xi ) f (xj )
f [xi , xj ]
Bracketed function
evaluations are finite
divided differences
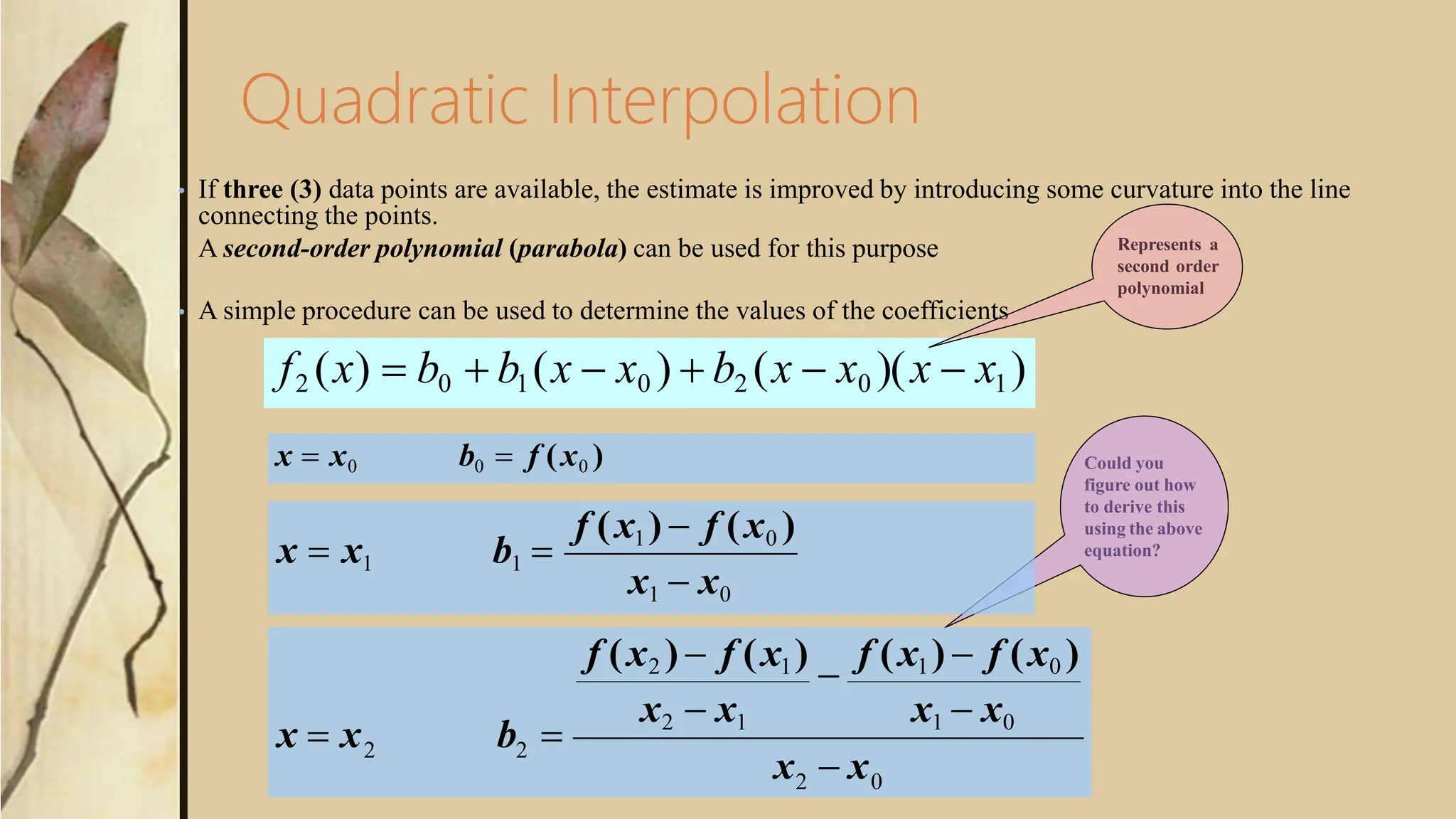
fn (x) b0 b1(x x0 ) b2(x x0 )(x x1) bn (x x0 )(x x1) (x xn1)
b0 f (x0 ) b1 f [x1, x0 ] b2 f [x2, x1, x0 ] … bn f [xn , xn1, ,x1,x0 ]
i k
x x
f [xi , xj ] f [xj , xk ]
f [xi , xj , xk ]
0
1
n 0
x x
n1 n2
n n1
n n1
f [x , x
f [x , x
, x ,…, x ]
,…, x ] f [x
,…, x1, x0 ]
⁝](https://image.slidesharecdn.com/interpolation-1906051413271-240123172421-b711caec/75/interpolation-190605141327-1-pptx-7-2048.jpg)
![f1(x) = 2 + 6*(x-0) (based on x0 and x1)
f2(x) = 2 + 6*(x-0)+18(x-0)(x-2) (based on x0, x1 and x2)
f3(x) = 2 + 6*(x-0)+18(x-0)(x-2)+9(x-0)(x-2)(x-3) (based on x0, x1, x2, and x3)
f4(x) = 2 + 6x +18x(x-2) +9x(x-2)(x-3) +1x(x-2)(x-3)(x-4) (based on x0, x1, x2, x3, and x4)
= x4 – x2 + 2
EXAMPLE
DIVIDED DIFFERENCE TABLE
xi f(xi) f[xi,xj] f[xi,xj,xk] f[x,x,x,x] f[x...x]
x0=0 2
x1=2 14 6
x2=3 74 60 18
x3=4 242 168 54 9
x4=5 602 360 96 14 1
xi f(xi) f[xi,xj] f[xi,xj,xk] f[x,x,x,x]
x0 f(x0)
x1 f(x1) f[x1,x0]
x2 f(x2) f[x2,x1] f[x2,x1,x0]
x3 f(x3) f[x3,x2] f[x3,x2,x1] f[x3,x2,x1,x0]
x4 f(x4) f[x4,x3] f[x4,x3,x2] f[x4,x3,x2,x1]](https://image.slidesharecdn.com/interpolation-1906051413271-240123172421-b711caec/75/interpolation-190605141327-1-pptx-8-2048.jpg)
![Given:
x0=1 f(x0)=ln(1) = 0
x1=e f(x1)=ln(2.72) = 1
x2=e2 f(x2)=ln(7.39) = 2
Estimate ln(2) = ?
using interpolation
Find f(x) first
xi f(xi)
x0=1 0
x1=2.72 1
x2=7.39 2
f[xi,xj] f[xi,xj xk]
.58
.214 -.057
f(x) = 0.58(x-1)
-0.057(x-1)(x-
2.72)
Then calculate
f(2)=0.58(2-1)-0.057(2-1)(2-
2.72)
= 0.621
[ TRUE ln(2) = 0.6931 ]
Example](https://image.slidesharecdn.com/interpolation-1906051413271-240123172421-b711caec/75/interpolation-190605141327-1-pptx-9-2048.jpg)
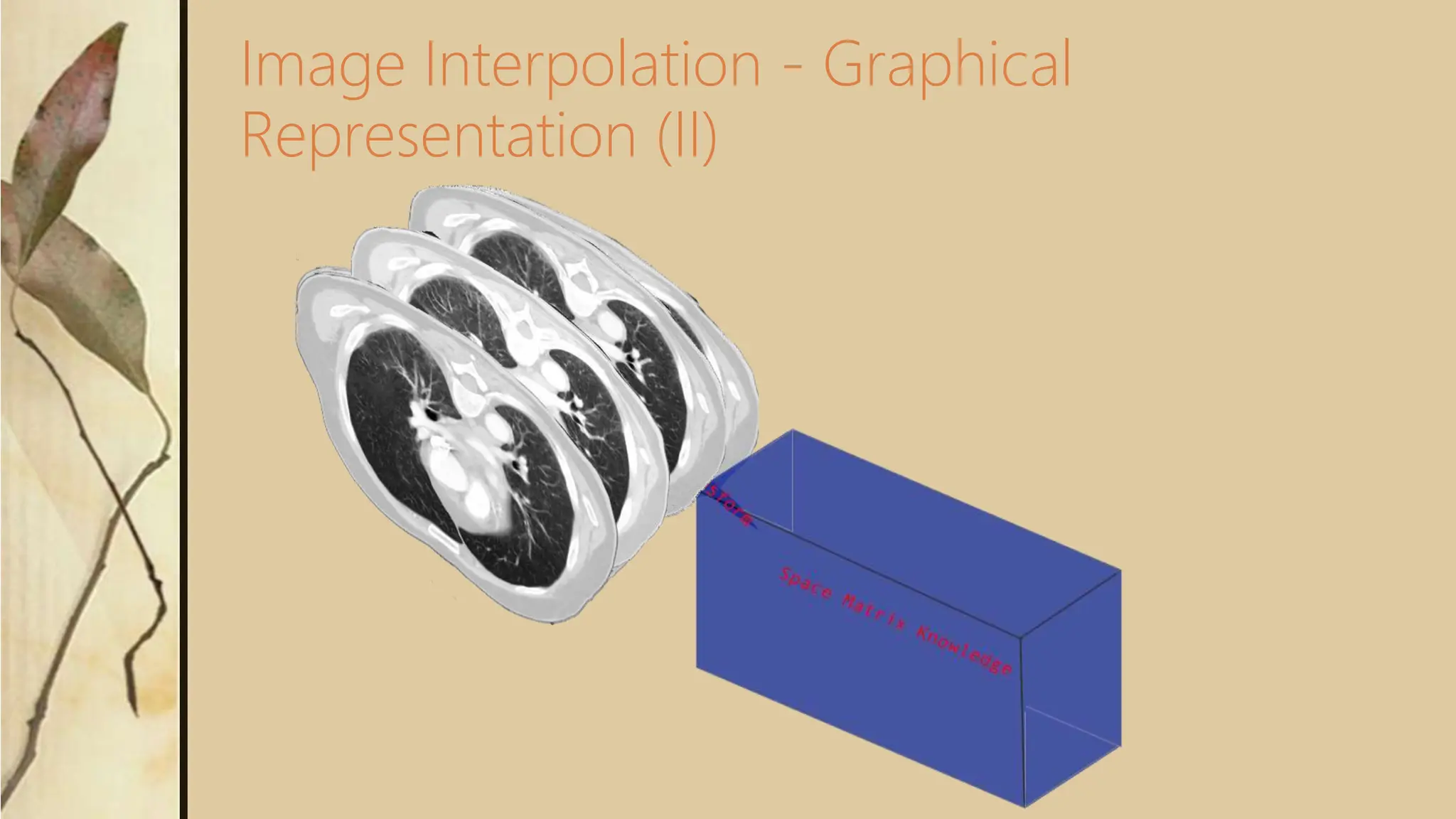
![Image Interpolation - Theory
⚫ [IDEA]
⚫ In order to provide a richer environment we are thinking of using
interpolation methods that will generate “artificial images” thus revealing
hidden information.
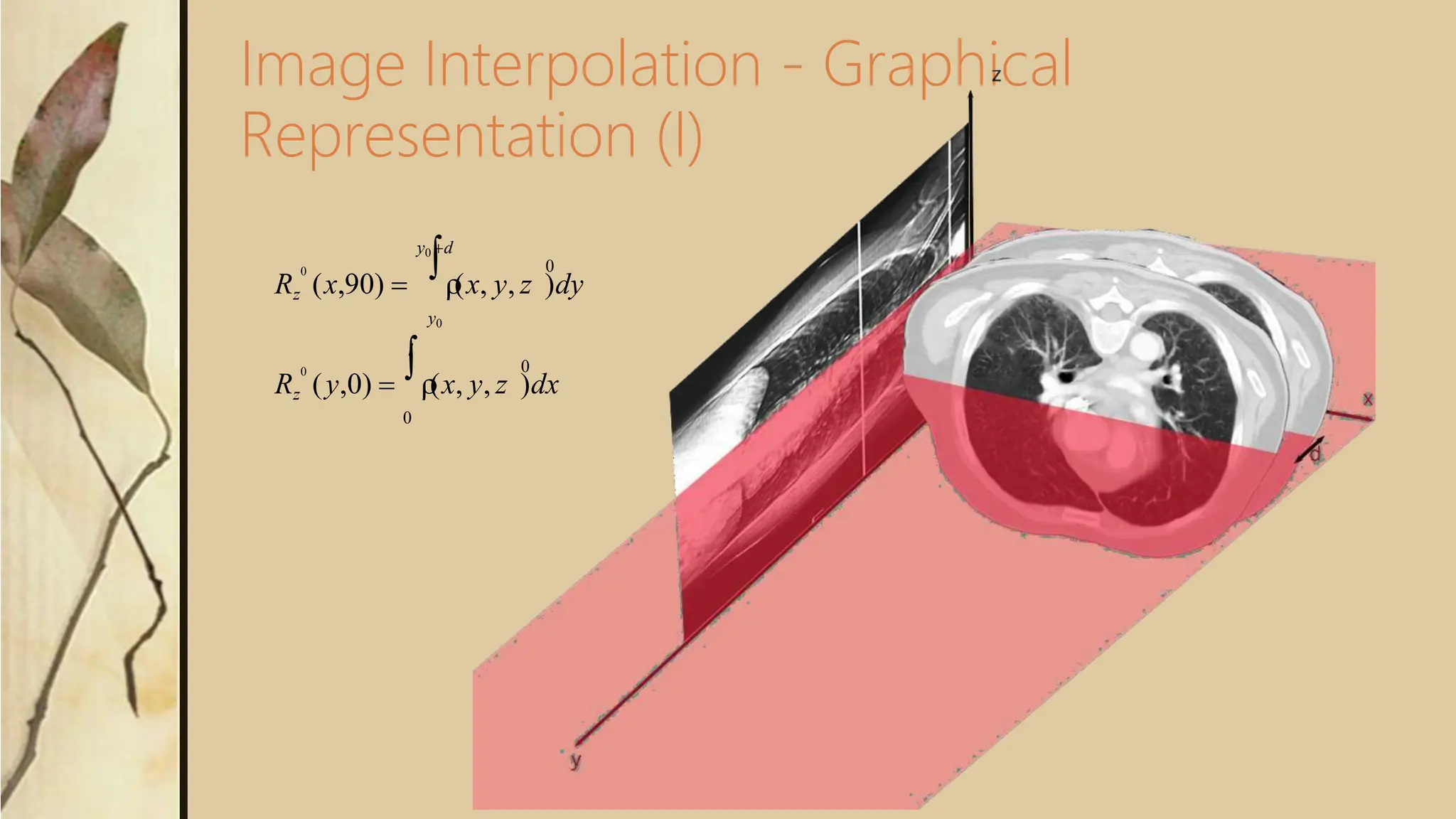
⚫ [RADON RECONSTRUCTION]
⚫ Radon reconstruction is the technique in which the object is reconstructed
from its projections. This reconstruction method is based on approximating
the inverse Radon Transform.
⚫ [RADON Transform]
⚫ The 2-D Radon transform is the mathematical relationship which maps the
spatial domain (x,y) to the Radon domain (p,phi). The Radon transform
consists of taking a line integral along a line (ray) which passes through the
object space. The radon transform is expressed mathematically as:
{R
}( p,
)
(x, y)(xcos ysin p)dxdy
](https://image.slidesharecdn.com/interpolation-1906051413271-240123172421-b711caec/75/interpolation-190605141327-1-pptx-12-2048.jpg)





























![[DSC Europe 25] Nikolay Burlutskiy - Best Practices for Building Enterprise M...](https://cdn.slidesharecdn.com/ss_thumbnails/uirvaiuvq8y1w8hzd9tx-7-251212103249-2619edb4-thumbnail.jpg?width=640&height=640&fit=bounds)






![[DSC Europe 25] Ivan Peric - Intelligence Swarm Logic and Techno-Functional M...](https://cdn.slidesharecdn.com/ss_thumbnails/7my7c97fsduiccadgavw-2-251212103249-5a03f7c6-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DSC Europe 25] Milan Sekuloski - Data, Defence, and Development: Cybersecuri...](https://cdn.slidesharecdn.com/ss_thumbnails/dfrkwwx4qly6atqpbl4z-4-251209104645-c3d4b0ca-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Bassam Maharmeh - Artificial Intelligence: Opportunities and ...](https://cdn.slidesharecdn.com/ss_thumbnails/thhfmr2fqpawzj7hsjpg-5-251211083048-2c23204f-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Marko Krstic - Understanding the AI Threat Landscape - Risks,...](https://cdn.slidesharecdn.com/ss_thumbnails/tiyim1ins5jvbrvzpzla-2-251209104645-c69d3553-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DSC Europe 25] Behzad Hosseini - AI Agents in the Wild: Deploying Models tha...](https://cdn.slidesharecdn.com/ss_thumbnails/3qtejajvsjqrzwfept2c-10-251212103250-7f2b1068-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DSC Europe 25] Dunja Adzic Jovanovic - AI and Cybersecurity: Defending Data ...](https://cdn.slidesharecdn.com/ss_thumbnails/o1zylpbhrtwnixxq2xj8-7-251211083048-185086f6-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Debmalya Biswas - Agentification: the art of transforming man...](https://cdn.slidesharecdn.com/ss_thumbnails/r5azlggvtqiaiiusrqdr-4-251212103249-5a12c89b-thumbnail.jpg?width=640&height=640&fit=bounds)