More Related Content
![[db tech showcase Sapporo 2015] B16:ビッグデータには、なぜ列指向が有効なのか? by 日本ヒューレット・パッカード株式...](https://cdn.slidesharecdn.com/ss_thumbnails/dbtssapporo2015b16bigdataverticahewletpackard-150918014205-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
[db tech showcase Sapporo 2015] B16:ビッグデータには、なぜ列指向が有効なのか? by 日本ヒューレット・パッカード株式... 
PDF
【より深く知ろう】活用最先端!データベースとアプリケーション開発をシンプルに、高速化するテクニック 
PDF
Oracle Cloud Infrastructure:2021年6月度サービス・アップデート 
PDF
オラクルの運用管理ソリューションご紹介(2021/02 版) 
PDF

PDF

PDF
Oracle Database 11g,12cからのアップグレード対策とクラウド移行 (Oracle Cloudウェビナーシリーズ: 2021年7... 
PDF
オラクルのHPC/GPUソリューションご紹介(2021/08版) What's hot

PDF
Oracle Cloud Infrastructure:2021年3月度サービス・アップデート 
PDF
Oracle Cloud Infrastructure:2021年9月度サービス・アップデート 
PDF
Oracle Database� Enterprise Edition で解決する�データベースシステムの課題 �(12c対応版) 
PPTX
ビッグデータ処理データベースの全体像と使い分け - 2017年 Version - 
PPTX
Oracle Data Guard basics and how to create manually 18c plus ![【旧版】Oracle Database Cloud Service:サービス概要のご紹介 [2021年7月版]](https://cdn.slidesharecdn.com/ss_thumbnails/ocidatabaseoverview210709-210709093949-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
【旧版】Oracle Database Cloud Service:サービス概要のご紹介 [2021年7月版] 
PPTX
Yahoo! JAPANのOracle構成-2017年版 
PDF
Oracle Database 12c R1 主要新機能のご紹介 ![【旧版】Oracle Exadata Cloud Service:サービス概要のご紹介 [2021年6月版]](https://cdn.slidesharecdn.com/ss_thumbnails/exadatacloudserviceoverview210607-210608075757-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
【旧版】Oracle Exadata Cloud Service:サービス概要のご紹介 [2021年6月版] 
PPTX

PDF
はじめてのOracle Cloud Infrastructure (Oracle Cloudウェビナーシリーズ: 2021年8月11日) 
PDF
Oracle Cloud Infrastructure:2020年4月度サービス・アップデート 
PDF
Zero Data Loss Recovery Applianceによるデータベース保護のアーキテクチャ 
PDF
Introduction to Modern Analytical DB ![[D36] Michael Stonebrakerが生み出した列指向データベースは何が凄いのか? ~Verticaを例に列指向データベースのアーキテクチャ...](https://cdn.slidesharecdn.com/ss_thumbnails/d36verticakomori-131125025044-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
[D36] Michael Stonebrakerが生み出した列指向データベースは何が凄いのか? ~Verticaを例に列指向データベースのアーキテクチャ... ![[db tech showcase Tokyo 2017] A32: Attunity Replicate + Kafka + Hadoop マルチデータ...](https://cdn.slidesharecdn.com/ss_thumbnails/attunityreplicatekafkahadoop-170911072451-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
[db tech showcase Tokyo 2017] A32: Attunity Replicate + Kafka + Hadoop マルチデータ... 
PPTX
Database Cloud Service/Exadata Cloud Service/Exadata Cloud at Customer サービスアッ... 
PPTX
Coherenceを利用するときに気をつけること #OracleCoherence 
PDF
自律型データベース Oracle Autonomous Database 最新情報 
PDF
事例から見るNoSQLの使い方 - db tech showcase Tokyo 2015 2015/06/11 Viewers also liked

PDF
予測不能な時代に、今 企業が実践すべきBCPとは?|アシストマイクロ 
PDF
遠隔作業支援システム紹介資料 - NTTデータ、Vuzix M100 
PDF
Oracle GoldenGate アーキテクチャと基本機能 
PDF
脱Excelで部門のデータ管理業務を�効率化するデータ活用クラウド 
PDF
オラクルクラウドで開発を~サーバからDB/アプリケーションサーバ準備が、2時間で~ 
PDF

PDF
Oracle GoldenGate Cloud Serviceユーザーズガイド Similar to [INSIGHT OUT 2011] C27 今こそBCPを考える ~コスト・要件に応じたデータベースのディザスタ・リカバリを提案しよう!~(kishida)

PDF
C12 AlwaysOn 可用性グループとデータベースミラーリングのIO特製の比較 by 多田典史 
PDF

PDF

PDF
iOS/Androidにも対応した SQL Anywhere 12の魅力 ![[db tech showcase Tokyo 2018] #dbts2018 #C17 『OracleからPostgreSQLへ移行する際のポイントとレ...](https://cdn.slidesharecdn.com/ss_thumbnails/dbts2018c17quest-180929165135-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
[db tech showcase Tokyo 2018] #dbts2018 #C17 『OracleからPostgreSQLへ移行する際のポイントとレ... 
PDF

PDF

PDF

PDF
GoldenGateテクニカルセミナー4「テクニカルコンサルタントが語るOracle GoldenGate現場で使える極意」(2016/5/11) 
PDF

PDF
ディザスタリカバリとAWS最新動向 - AWSクラウドアドバンテージセミナー 
PDF
RWC2012(ワコムアイティ&テクノプロジェクト) 
PDF

PDF

PPTX
祝!PostgreSQLレプリケーション10周年!徹底紹介!! 
PDF
Sql server 2012 の新機能を使ってみよう。db 管理者向け機能の紹介 
PDF
【17-E-2】分散されたデータをいかに統合するのか 
PDF
"Global Distcloud File System" ~インタークラウド広域分散ファイルシステム 大陸間横断ライブマイグレーションを実現する技術 ![[INSIGHT OUT 2011] C26 ミッションクリティカルを実現する国産データベースHiRDBの技術(hara)](https://cdn.slidesharecdn.com/ss_thumbnails/insightout2011c26hara-111114012851-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
[INSIGHT OUT 2011] C26 ミッションクリティカルを実現する国産データベースHiRDBの技術(hara) 
PDF
More from Insight Technology, Inc.

PDF

PDF
Docker and the Oracle Database 
PDF
Great performance at scale~次期PostgreSQL12のパーティショニング性能の実力に迫る~ 
PDF

PDF
仮想通貨ウォレットアプリで理解するデータストアとしてのブロックチェーン 
PDF

PDF

PDF

PDF
SQL Server エンジニアのためのコンテナ入門 
PDF
Lunch & Learn, AWS NoSQL Services 
PDF
db tech showcase2019オープニングセッション @ 森田 俊哉 
PDF
db tech showcase2019 オープニングセッション @ 石川 雅也 
PDF
db tech showcase2019 オープニングセッション @ マイナー・アレン・パーカー 
PPTX
難しいアプリケーション移行、手軽に試してみませんか? 
PPTX
Attunityのソリューションと異種データベース・クラウド移行事例のご紹介 
PPTX

PPTX
コモディティサーバー3台で作る高速処理 “ハイパー・コンバージド・データベース・インフラストラクチャー(HCDI)” システム『Insight Qube』... 
PDF
複数DBのバックアップ・切り戻し運用手順が異なって大変?!運用性の大幅改善、その先に。。 
PPTX
Attunity社のソリューションの日本国内外適用事例及びロードマップ紹介[ATTUNITY & インサイトテクノロジー IoT / Big Data フ... ![レガシーに埋もれたデータをリアルタイムでクラウドへ [ATTUNITY & インサイトテクノロジー IoT / Big Data フォーラム 2018]](https://cdn.slidesharecdn.com/ss_thumbnails/attunityseminar20181206msnakagawa-181211014925-thumbnail.jpg?width=640&height=640&fit=bounds)
PPTX
レガシーに埋もれたデータをリアルタイムでクラウドへ [ATTUNITY & インサイトテクノロジー IoT / Big Data フォーラム 2018] [INSIGHT OUT 2011] C27 今こそBCPを考える ~コスト・要件に応じたデータベースのディザスタ・リカバリを提案しよう!~(kishida)
- 1.
今こそBCPを考える
~コスト・要件に応じたデータベースの
ディザスタ・リカバリを提案しよう!~
2011/10/20
株式会社 日立ソリューションズ
サービス事業統括本部 ビジネスフロント部
岸田 聡
© Hitachi Solutions, Ltd. 2011. All rights reserved.
- 2.
- 3.
- 4.
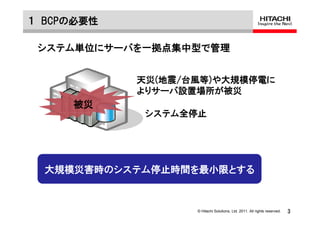
1 BCPの必要性
システム単位にサーバを一拠点集中型で管理
天災(地震/台風等)や大規模停電に
よりサーバ設置場所が被災
被災
システム全停止
サービス提供ができない = 機会損失
大規模災害時のシステム停止時間を最小限とする
金融決済業務では1時間で6億円
© Hitachi Solutions, Ltd. 2011. All rights reserved. 3
- 5.
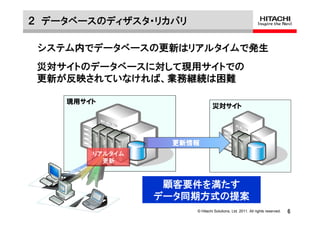
1 BCPの必要性
本番稼動しているシステムと同一の構成を別拠点に
用意し、被災時に接続先を変更することで、同一業務が
継続可能
被災
システム全体のコストを削減するために
災対サイトは最低限運用可能なスペックの
サーバーを用意するという考え方もある
© Hitachi Solutions, Ltd. 2011. All rights reserved. 4
- 6.
- 7.
- 8.
- 9.
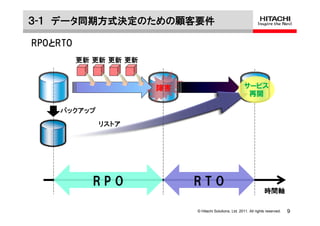
3-1 データ同期方式決定のための顧客要件
顧客要件として最低限必要な情報は2点
RPO:Recover Point Objective (目標復旧時点)
業務/情報システムの停止からの復旧時に、
どの時点のデータまでを保証するか。
RTO:Recover Time Objective(目標復旧時間)
業務/情報システムの停止から、定められたレベルに
サービスが復旧するまでに必要となる経過時間。
© Hitachi Solutions, Ltd. 2011. All rights reserved. 8
- 10.
- 11.
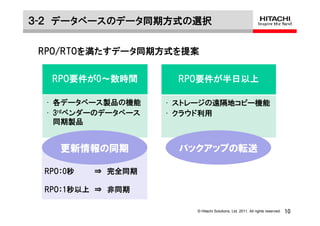
3-2 データベースのデータ同期方式の選択
RPO/RTOを満たすデータ同期方式を提案
RPO要件が0~数時間 RPO要件が半日以上
• 各データベース製品の機能 • ストレージの遠隔地コピー機能
• 3rdベンダーのデータベース • クラウド利用
同期製品
更新情報の同期 バックアップの転送
RPO:0秒 ⇒ 完全同期
RPO:1秒以上 ⇒ 非同期
© Hitachi Solutions, Ltd. 2011. All rights reserved. 10
- 12.
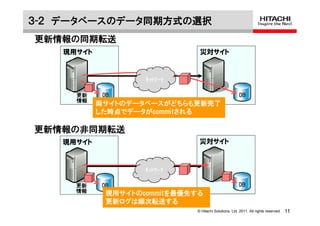
3-2 データベースのデータ同期方式の選択
更新情報の同期転送
現用サイト 災対サイト
ネットワーク
更新 DB DB
情報
両サイトのデータベースがどちらも更新完了
した時点でデータがcommitされる
更新情報の非同期転送
現用サイト 災対サイト
ネットワーク
更新 DB DB
情報
現用サイトのcommitを最優先する
更新ログは順次転送する
© Hitachi Solutions, Ltd. 2011. All rights reserved. 11
- 13.
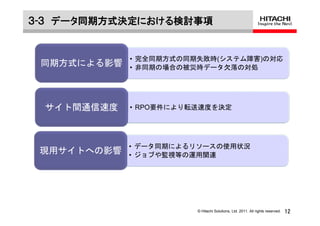
3-3 データ同期方式決定における検討事項
• 完全同期方式の同期失敗時(システム障害)の対応
同期方式による影響 • 非同期の場合の被災時データ欠落の対処
サイト間通信速度 • RPO要件により転送速度を決定
• データ同期によるリソースの使用状況
現用サイトへの影響 • ジョブや監視等の運用関連
© Hitachi Solutions, Ltd. 2011. All rights reserved. 12
- 14.
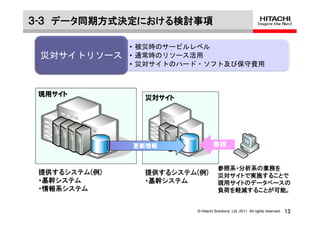
3-3 データ同期方式決定における検討事項
• 被災時のサービルレベル
災対サイトリソース • 通常時のリソース活用
• 災対サイトのハード・ソフト及び保守費用
現用サイト
災対サイト
更新情報 参照
参照系・分析系の業務を
提供するシステム(例) 提供するシステム(例) 災対サイトで実施することで
・基幹システム ・基幹システム 現用サイトのデータベースの
・情報系システム 負荷を軽減することが可能。
© Hitachi Solutions, Ltd. 2011. All rights reserved. 13
- 15.
- 16.
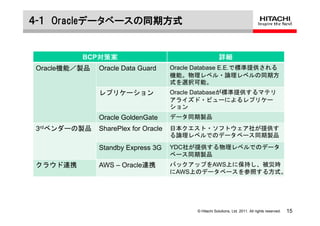
4-1 Oracleデータベースの同期方式
対策案
BCP対策案 詳細
Oracle機能/製品 Oracle Data Guard Oracle Database E.E.で標準提供される
機能。物理レベル・論理レベルの同期方
式を選択可能。
レプリケーション Oracle Databaseが標準提供するマテリ
アライズド・ビューによるレプリケー
ション
Oracle GoldenGate データ同期製品
3rdベンダーの製品 SharePlex for Oracle 日本クエスト・ソフトウェア社が提供す
る論理レベルでのデータベース同期製品
Standby Express 3G YDC社が提供する物理レベルでのデータ
ベース同期製品
クラウド連携 AWS – Oracle連携 バックアップをAWS上に保持し、被災時
にAWS上のデータベースを参照する方式。
© Hitachi Solutions, Ltd. 2011. All rights reserved. 15
- 17.
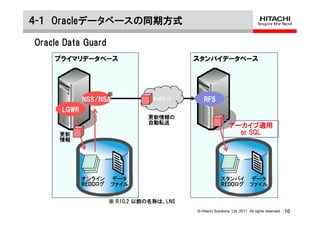
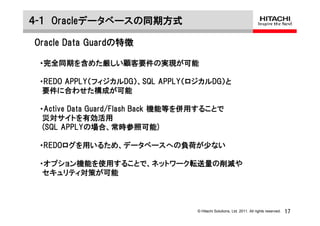
4-1 Oracleデータベースの同期方式
Oracle DataGuard
プライマリデータベース スタンバイデータベース
※
NSS/NSA ネットワーク RFS
LGWR
更新情報の
自動転送
アーカイブ適用
更新 or SQL
情報
オンライン データ スタンバイ データ
REDOログ
REDO ファイル REDOログ ファイル
REDO
※ R10.2 以前の名称は、LNS
© Hitachi Solutions, Ltd. 2011. All rights reserved. 16
- 18.
4-1 Oracleデータベースの同期方式
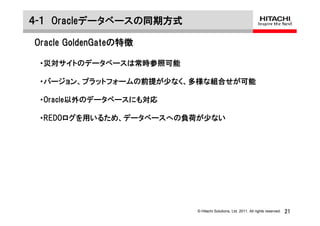
Oracle DataGuardの特徴
・完全同期を含めた厳しい顧客要件の実現が可能
・REDO APPLY(フィジカルDG)、SQL APPLY(ロジカルDG)と
要件に合わせた構成が可能
・Active Data Guard/Flash Back 機能等を併用することで
災対サイトを有効活用
(SQL APPLYの場合、常時参照可能)
・REDOログを用いるため、データベースへの負荷が少ない
・オプション機能を使用することで、ネットワーク転送量の削減や
セキュリティ対策が可能
© Hitachi Solutions, Ltd. 2011. All rights reserved. 17
- 19.
- 20.
- 21.
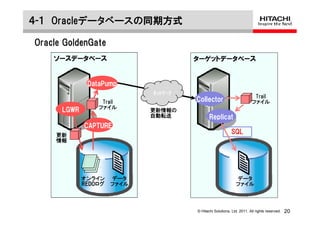
4-1 Oracleデータベースの同期方式
Oracle GoldenGate
ソースデータベース ターゲットデータベース
DataPump
ネットワーク
Trail
Trail Collector ファイル
ファイル
LGWR 更新情報の
自動転送 Replicat
CAPTURE
更新
SQL
情報
オンライン データ データ
REDOログ
REDO ファイル ファイル
© Hitachi Solutions, Ltd. 2011. All rights reserved. 20
- 22.
- 23.
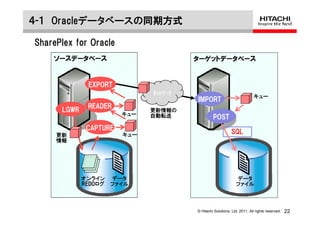
4-1 Oracleデータベースの同期方式
SharePlex forOracle
ソースデータベース ターゲットデータベース
EXPORT
ネットワーク
キュー
IMPORT
READER
LGWR 更新情報の
キュー 自動転送 POST
CAPTURE
更新 キュー SQL
情報
オンライン データ データ
REDOログ
REDO ファイル ファイル
© Hitachi Solutions, Ltd. 2011. All rights reserved. 22
- 24.
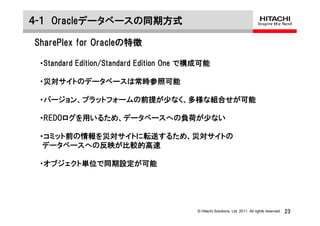
4-1 Oracleデータベースの同期方式
SharePlex forOracleの特徴
・Standard Edition/Standard Edition One で構成可能
・災対サイトのデータベースは常時参照可能
・バージョン、プラットフォームの前提が少なく、多様な組合せが可能
・REDOログを用いるため、データベースへの負荷が少ない
・コミット前の情報を災対サイトに転送するため、災対サイトの
データベースへの反映が比較的高速
・オブジェクト単位で同期設定が可能
© Hitachi Solutions, Ltd. 2011. All rights reserved. 23
- 25.
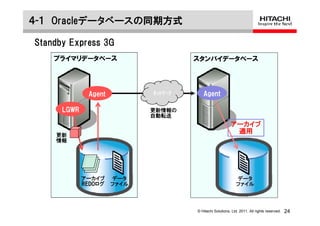
4-1 Oracleデータベースの同期方式
Standby Express3G
プライマリデータベース スタンバイデータベース
Agent ネットワーク Agent
LGWR 更新情報の
自動転送
アーカイブ
適用
更新
情報
アーカイブ データ データ
REDOログ
REDO ファイル ファイル
© Hitachi Solutions, Ltd. 2011. All rights reserved. 24
- 26.
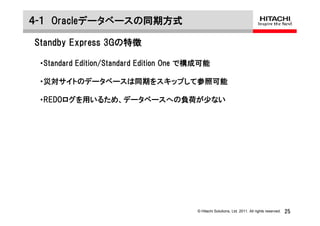
4-1 Oracleデータベースの同期方式
Standby Express3Gの特徴
・Standard Edition/Standard Edition One で構成可能
・災対サイトのデータベースは同期をスキップして参照可能
・REDOログを用いるため、データベースへの負荷が少ない
© Hitachi Solutions, Ltd. 2011. All rights reserved. 25
- 27.
- 28.
- 29.
4-2 SQL Serverデータベースの同期方式
SQLServer ログ配布
プライマリサーバ セカンダリサーバ
ネットワーク
コピージョブ
による転送
トランザク 復元ジョブによる
ションログ トランザクション
バックアップ
更新 ログの適用
情報
トランザク データ データ
ションログ ファイル ファイル
© Hitachi Solutions, Ltd. 2011. All rights reserved. 28
- 30.
- 31.
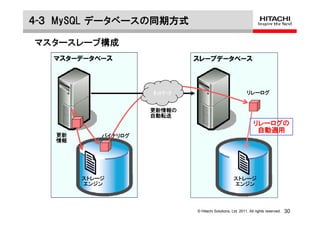
4-3 MySQL データベースの同期方式
マスタースレーブ構成
マスターデータベース スレーブデータベース
ネットワーク リレーログ
更新情報の
自動転送
リレーログの
自動適用
更新 バイナリログ
情報
ストレージ ストレージ
エンジン エンジン
© Hitachi Solutions, Ltd. 2011. All rights reserved. 30
- 32.
- 33.
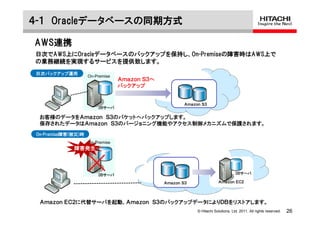
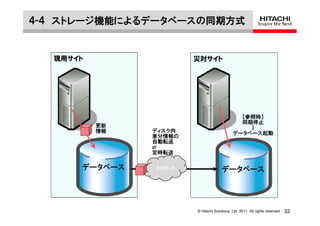
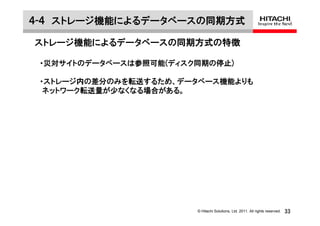
4-4 ストレージ機能によるデータベースの同期方式
現用サイト 災対サイト
【参照時】
同期停止
更新 ↓
情報 ディスク内 データベース起動
差分情報の
自動転送
or
定時転送
データベース ネットワーク データベース
© Hitachi Solutions, Ltd. 2011. All rights reserved. 32
- 34.
- 35.
- 36.
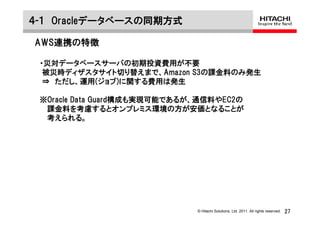
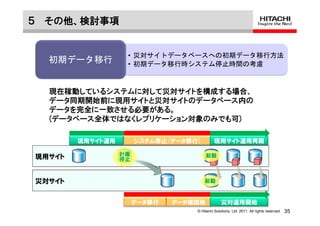
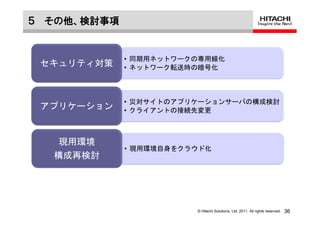
5 その他、検討事項
• 災対サイトデータベースへの初期データ移行方法
初期データ移行 • 初期データ移行時システム停止時間の考慮
現在稼動しているシステムに対して災対サイトを構成する場合、
データ同期開始前に現用サイトと災対サイトのデータベース内の
データを完全に一致させる必要がある。
(データベース全体ではなくレプリケーション対象のみでも可)
現用サイト運用 システム停止(データ移行) 現用サイト運用再開
計画 起動
現用サイト 停止
災対サイト 起動
データ移行 データ確認他 災対運用開始
© Hitachi Solutions, Ltd. 2011. All rights reserved. 35
- 37.
5 その他、検討事項
• 同期用ネットワークの専用線化
セキュリティ対策 • ネットワーク転送時の暗号化
• 災対サイトのアプリケーションサーバの構成検討
アプリケーション • クライアントの接続先変更
現用環境
• 現用環境自身をクラウド化
構成再検討
© Hitachi Solutions, Ltd. 2011. All rights reserved. 36
- 38.
- 39.


![[INSIGHT OUT 2011] C27 今こそBCPを考える ~コスト・要件に応じたデータベースのディザスタ・リカバリを提案しよう!~(kishida)](https://image.slidesharecdn.com/insightout2011c27kishida-111114013018-phpapp02/85/INSIGHT-OUT-2011-C27-BCP-kishida-40-320.jpg)
![[INSIGHT OUT 2011] C27 今こそBCPを考える ~コスト・要件に応じたデータベースのディザスタ・リカバリを提案しよう!~(kishida)](https://image.slidesharecdn.com/insightout2011c27kishida-111114013018-phpapp02/85/INSIGHT-OUT-2011-C27-BCP-kishida-41-320.jpg)
