The document discusses implementations of graph representations using adjacency matrices and adjacency lists, detailing their definitions, advantages, disadvantages, space complexities, and memory usage. It also explains Dijkstra's algorithm for finding the shortest path from a source vertex in a weighted graph, as well as the Floyd-Warshall algorithm for calculating the shortest paths between all pairs of vertices. Overall, it provides code examples and insights into the characteristics and efficiencies of different graph algorithms.
![ADJACENCY MATRIX
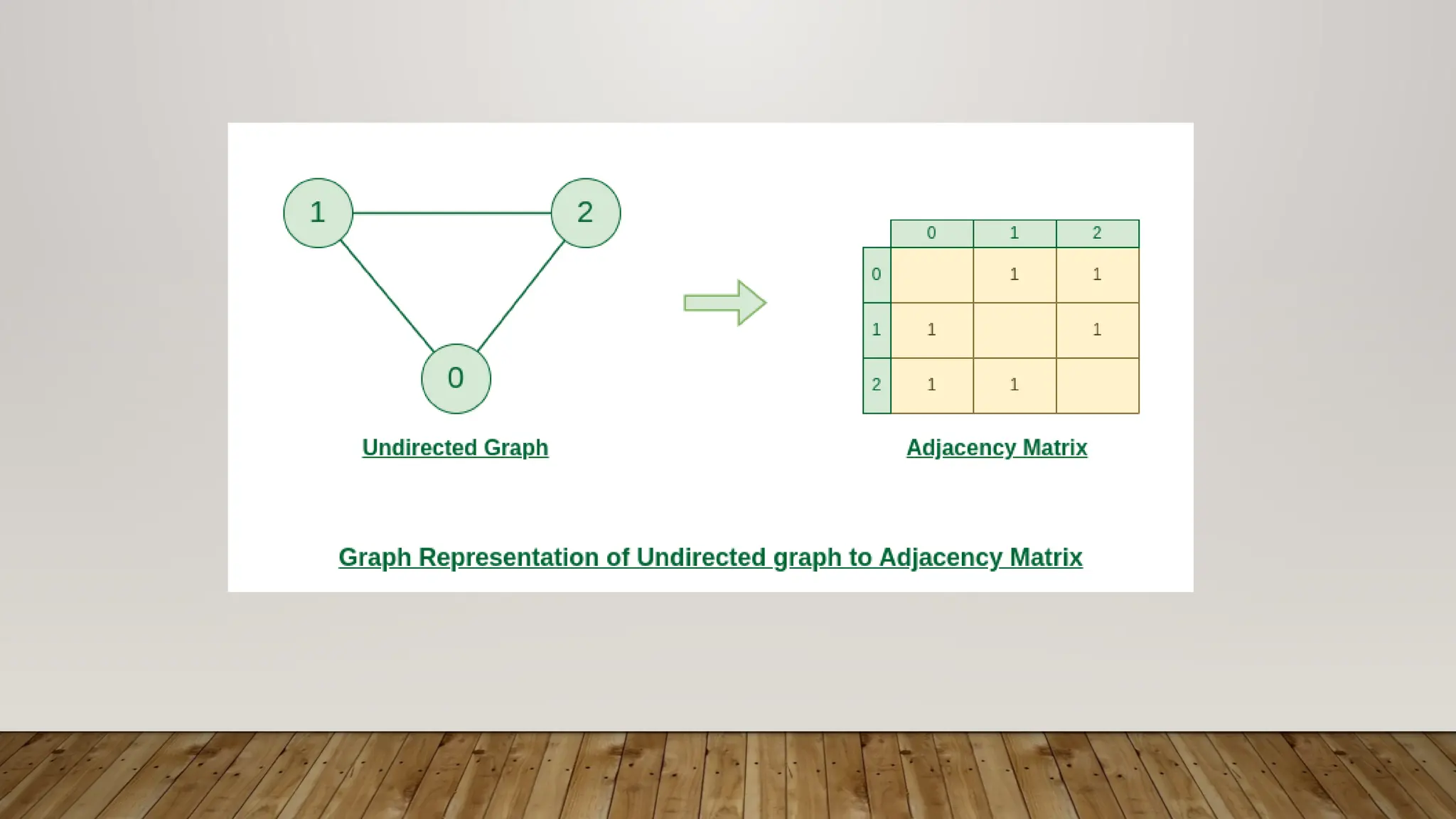
• Definition:An adjacency matrix is a 2D array (or matrix) of sizeVxV, whereV is the
number of vertices in the graph.
• Matrix Content : If there is an edge between vertices i and j, matrix[i][j] = 1 (for
unweighted graphs) or the weight of the edge (for weighted graphs).If there is no edge,
matrix[i][j] = 0.](https://image.slidesharecdn.com/implementationofgraphs-241013185613-fdda8f23/75/Implementation-of-graphs-adjaceny-matrix-2-2048.jpg)
![#include <iostream>
#include <vector>
using namespace std;
class graph{
private:
int n;
vector<vector<int>> adj_matrix;
public:
graph(int num):n(num),adj_matrix(n,vector<int>(n,0)){}
void add_edge(int u, int v)
{
if(u>=0 && u<n && v>=0 && v<n)
{
adj_matrix[u][v]=1;
adj_matrix[v][u]=1;
}
}
void print_matrix()
{
for(int i=0;i<n;i++)
{ for(int j=0;j<n;j++)
{
cout<<adj_matrix[i][j]<<"t";
}
cout<<endl;}}
};
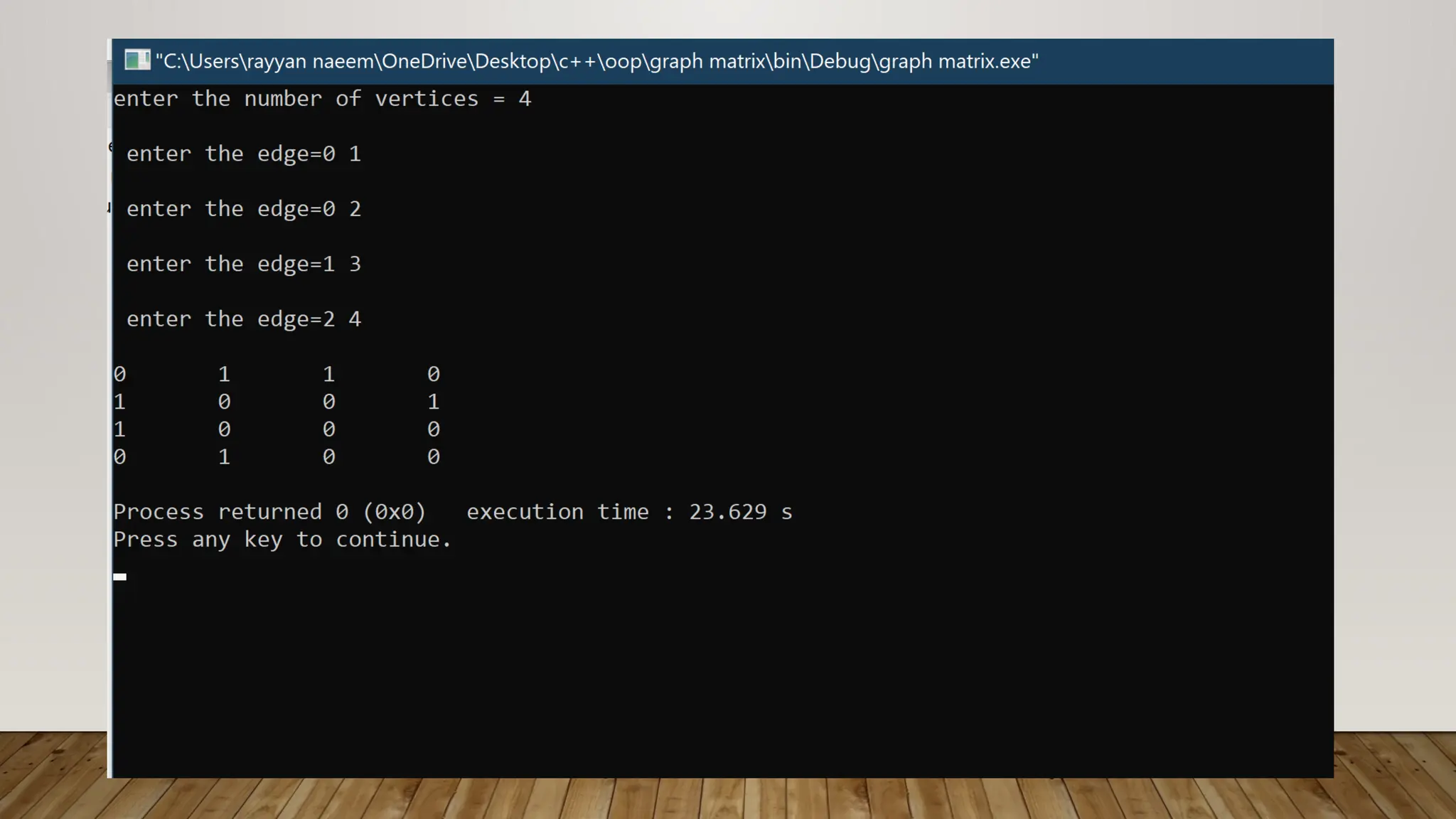
int main()
{
int x,a,b;
cout <<"enter the number of vertices = "; cin>>x;
graph g(x);
for(int i=0;i<x;i++)
{
cout <<"n enter the edge=";
cin>>a>>b;
g.add_edge(a,b);}
cout<<endl;
g.print_matrix();
return 0;
}](https://image.slidesharecdn.com/implementationofgraphs-241013185613-fdda8f23/75/Implementation-of-graphs-adjaceny-matrix-4-2048.jpg)
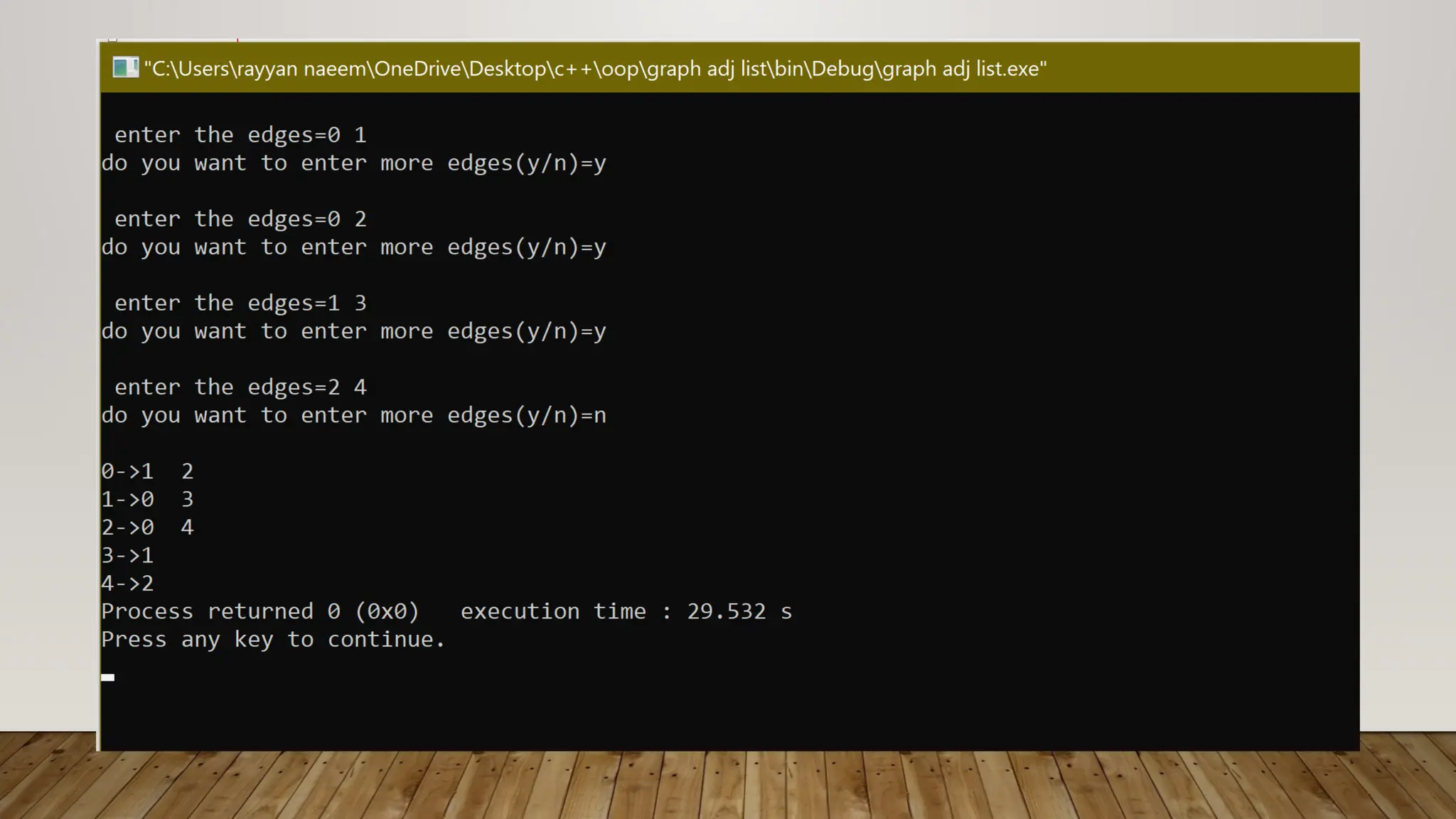
![#include <iostream>
#include<list>
#include<map>
using namespace std;
class graph
{
map <int,list<int>> adjlist;
public:
void add_edge(int u,int v)
{
adjlist[u].push_back(v);
adjlist[v].push_back(u);
}
void display()
{
for(auto i: adjlist)
{
cout<<endl <<i.first << "->";
for(auto j: i.second)
{ cout<<j<<" ";
}}}};
int main()
{
graph g;
int a,b;
char x;
bool n=true;
while(n)
{
cout<<"n enter the edges=";
cin>>a>>b;
g.add_edge(a,b);
cout<<"do you want to enter more edges(y/n)=";
cin>>x;
if(x=='n')
n=false;
}
g.display();
return 0;
}](https://image.slidesharecdn.com/implementationofgraphs-241013185613-fdda8f23/75/Implementation-of-graphs-adjaceny-matrix-9-2048.jpg)
![ALGORITHM
• 1. function Dijkstra(Graph, source):
• 2. dist[source] 0 // Distance from source to
←
source is 0
• 3. for each vertex v in Graph:
• 4. if v ≠ source:
• 5. dist[v] ∞ // Set all other distances to
←
infinity
• 6.add v to unvisited set
• 7. while unvisited set is not empty:
• 8. u vertex in unvisited set with smallest dist[u]
←
9. remove u from unvisited set
10. for each neighbor v of u:
11. alt dist[u] + length(u, v)
←
12. if alt < dist[v]:
13. dist[v] alt // Update distance if shorter path is
←
found
14. return dist[]](https://image.slidesharecdn.com/implementationofgraphs-241013185613-fdda8f23/75/Implementation-of-graphs-adjaceny-matrix-13-2048.jpg)
![ALGORITHM
• function FloydWarshall(dist[][]):
• for k from 1 to n:
• for i from 1 to n:
• for j from 1 to n:
• if dist[i][j] > dist[i][k] + dist[k][j]:
• dist[i][j] dist[i][k] + dist[k][j]
←
• return dist[][]](https://image.slidesharecdn.com/implementationofgraphs-241013185613-fdda8f23/75/Implementation-of-graphs-adjaceny-matrix-15-2048.jpg)