Download to read offline
![35
Dimensions
18
7
5
29.5
39.5
64
63
65
(10)
58.5
133.5
53
3-M6 depth 13
11
G×50
50
6
5H7 depth 5
6
5 E×50 F 5
5H7 depth 5
ø5H7 depth 5
H-M5 depth 8
55
J-M5 depth 10
RCP3 ROBO Cylinder
5.8
2.7 1.8
3.3
5.5
164.2 (with brake)
With Brake
ø5H7 depth 5
Details of A
A
Motor-encoder cable
connector (*1)
126 7.5
139.7 (without brake)
27
30
50
5
60
57
L
B 40.5
13 A
17.5 D 6.5 27
ST
3 3
(133.5)
ME SE Home ME (*2)
[Cable Exit Direction] (Optional)
(Top: CJT)
32
(Out: CJO)
Secure at
least 100
32 25
(Bottom: CJB)
(*1) The motor-encoder cable is provided as an integrated cable. (see page A-39)
(*2) After homing, the slider moves to the ME; therefore, please watch for any interference with the
surrounding objects.
ME: Mechanical end SE: Stroke end
* Adding a brake
will increase the weight by 0.4kg.
■ Dimensions/Weight by Stroke
Stroke 25 50 75 100 125 150
161.5 186.5 211.5 236.5 261.5 286.5
108 133 158 183 208 233
121 146 171 196 221 246
110.5 135.5 160.5 185.5 210.5 235.5
1 1 2 2 3 3
50.5 75.5 50.5 75.5 50.5 75.5
1 1 2 2 3 3
4 4 6 6 8 8
6 6 8 8 10 10
2.1 2.3 2.5 2.7 2.9 3.1
L
A
B
D
E
F
G
H
J
Weight (kg)
* Please note that, for 25mm stroke model with brake,
the motor unit protrudes from the end of the table.
For Special Orders P. A-9
2 Compatible Controllers
The RCP3 series actuators can operate with the controllers below. Select the controller according to your usage.
Name External View Model Description Max. Positioning Points Input Voltage Power Supply Capacity Standard Price See Page
Solenoid Valve Type
PMEC-C-42PI-NP-2-1 Easy-to-use controller, even for beginners
3 points
AC100V
AC200V
See P481 → P477
PSEP-C-42PI-NP-2-0
Operable with same signal as solenoid valve.
Supports both single and double solenoid types.
No homing necessary with simple absolute type.
DC24V 2A max.
→ P487
Splash-Proof
Solenoid Valve Type
PSEP-CW-42PI-NP-2-0
Positioner Type PCON-C-42PI-NP-2-0
Positioning is possible for up to 512 points 512 points
–
→ P525
Safety-Compliant
Positioner Type
PCON-CG-42PI-NP-2-0 –
Pulse Train Input Type
(Differential Line Driver)
PCON-PL-42PI-NP-2-0
Pulse train input type with
different line driver support
(–)
–
Pulse Train Input Type
(Open Collector)
PCON-PO-42PI-NP-2-0
Pulse train input type with
open collector support –
Serial
Communication Type
PCON-SE-42PI-N-0-0 Dedicated to serial communication 64 points –
Field Network Type RPCON-42P Dedicated to field network 768 points – → P503
Program Control
Type
PSEL-C-1-42PI-NP-2-0
Programmed operation is possible
Operation is possible on up to 2 axes
1500 points – → P557
* This is for the single-axis PSEL.
* 1 is a placeholder for the power supply voltage (1: 100V, 2: 100~240V).
RCP3-TA6R 286
Slider
Type
Mini
Standard
Controllers
Integrated
Rod
Type
Mini
Standard
Controllers
Integrated
Table/Arm
/Flat Type
Mini
Standard
Gripper/
Rotary Type
Linear Servo
Type
Cleanroom
Type
Splash Proof
Controllers
PMEC
/AMEC
PSEP
/ASEP
ROBO
NET
ERC2
PCON
ACON
SCON
PSEL
ASEL
SSEL
XSEL
Pulse Motor
Servo Motor
(24V)
Servo Motor
(200V)
Linear
Servo Motor
Sold & Serviced By:
ELECTROMATE
Toll Free Phone (877) SERVO98
Toll Free Fax (877) SERV099
www.electromate.com
sales@electromate.com](https://image.slidesharecdn.com/iaircp3ta6rspecsheet-141014122154-conversion-gate01/75/Iai-rcp3-ta6_r_specsheet-2-2048.jpg)

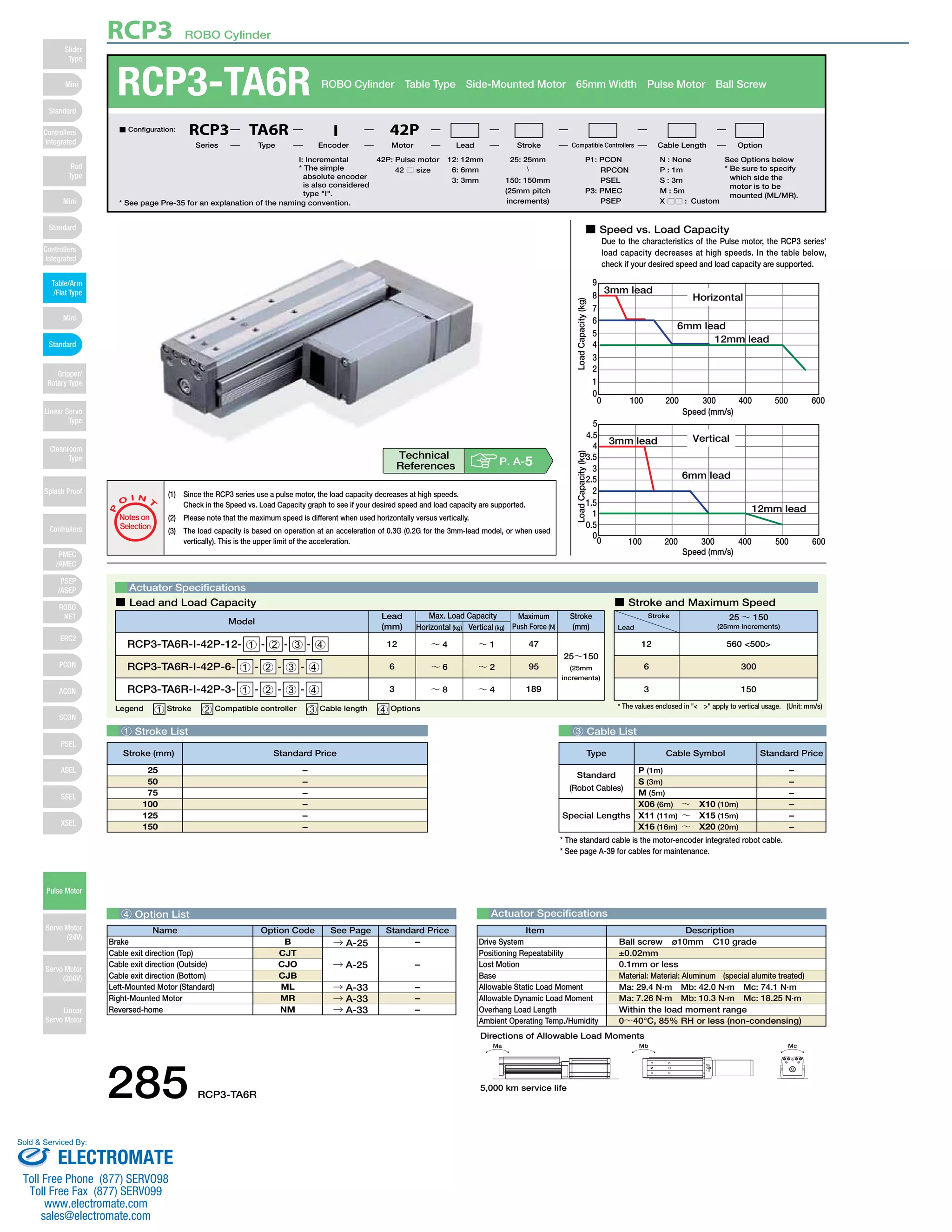
The document provides specifications for the RCP3 ROBO Cylinder. It includes: 1) A graph showing the cylinder's decreasing load capacity at higher speeds due to its pulse motor characteristics. 2) Dimensions and weight specifications for cylinders with different strokes ranging from 25mm to 150mm. 3) Details on compatible controllers that can operate the cylinder, including their positioning points, input voltage, and power supply capacity.




































































![[BDD 2025 - Full-Stack Development] Digital Accessibility: Why Developers nee...](https://cdn.slidesharecdn.com/ss_thumbnails/fs-digitalaccessibilitywhydevelopersneedtoknowandcarein2025-251127011019-0674441d-thumbnail.jpg?width=640&height=640&fit=bounds)








![[BDD 2025 - Mobile Development] Crafting Immersive UI with E2E and AGSL Shade...](https://cdn.slidesharecdn.com/ss_thumbnails/md-craftingimmersiveuiwithe2eandagslshaderveronicaputrianggraini-251124030840-0c677f44-thumbnail.jpg?width=640&height=640&fit=bounds)

![[BDD 2025 - Full-Stack Development] The Modern Stack: Building Web & AI Appli...](https://cdn.slidesharecdn.com/ss_thumbnails/fs-themodernstackbuildingwebaiapplicationswithserverless-251124030844-388cf04f-thumbnail.jpg?width=640&height=640&fit=bounds)
![[BDD 2025 - Mobile Development] Exploring Apple’s On-Device FoundationModels](https://cdn.slidesharecdn.com/ss_thumbnails/md-exploringappleson-devicefoundationmodels-251124030840-d690542c-thumbnail.jpg?width=640&height=640&fit=bounds)






