Download to read offline

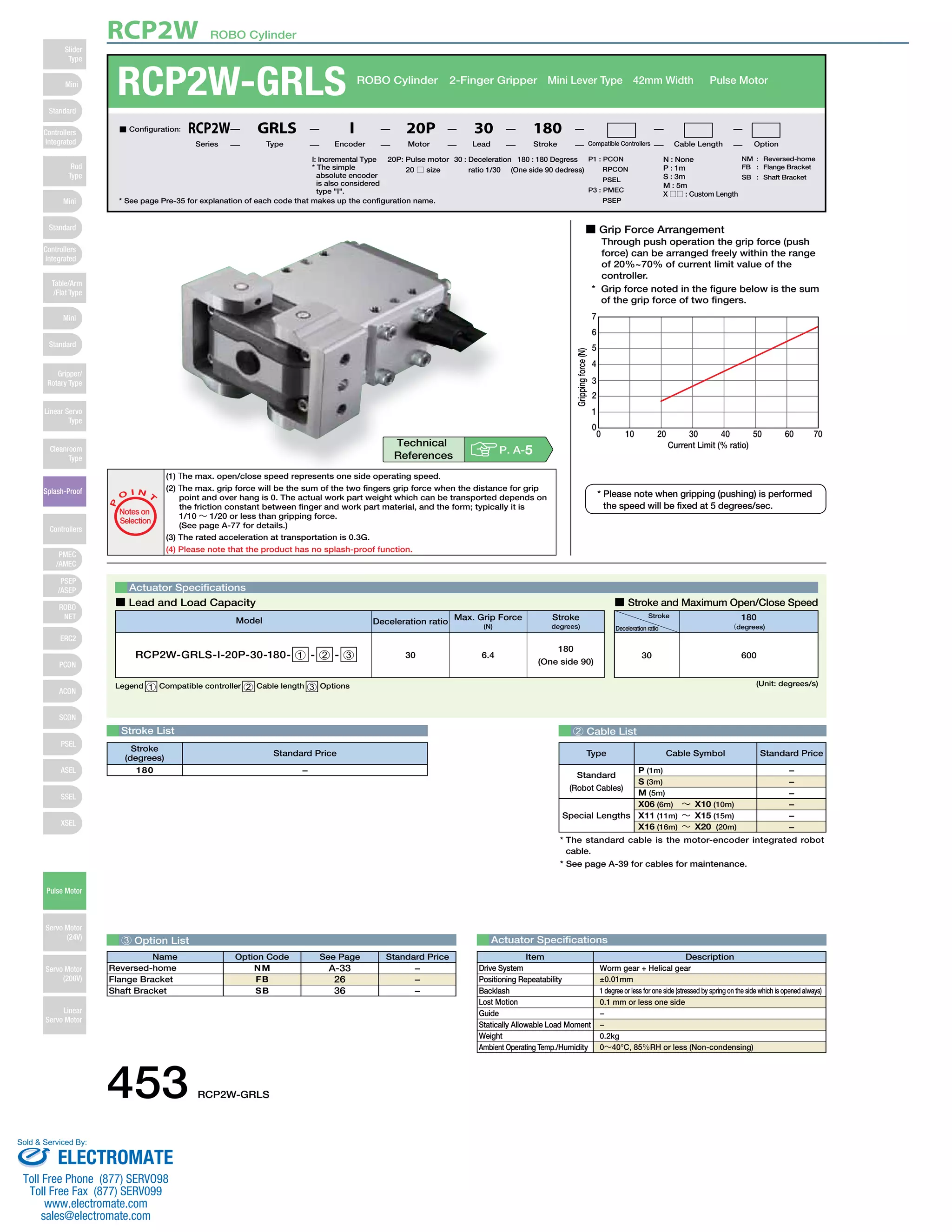
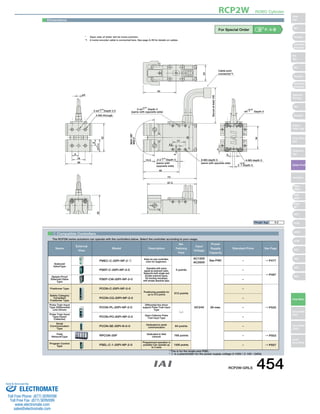

1) The document provides specifications for the RCP2W-GRLS ROBO Cylinder, a 2-finger gripper mini lever type cylinder with a 42mm width and pulse motor. 2) It can be operated with compatible controllers including the PMEC-C-20PI-NP-2-1, PSEP-C-20PI-NP-2-0, and PCON-C-20PI-NP-2-0, and has a maximum grip force of 7N, stroke of 180 degrees, and deceleration ratio of 30. 3) Dimensions and installation details are provided along with compatible robot cable options.





















































































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)

