DevOps and Testing slides at DASA ConnectKari Kakkonen
My and Rik Marselis slides at 30.5.2024 DASA Connect conference. We discuss about what is testing, then what is agile testing and finally what is Testing in DevOps. Finally we had lovely workshop with the participants trying to find out different ways to think about quality and testing in different parts of the DevOps infinity loop.
UiPath Test Automation using UiPath Test Suite series, part 4DianaGray10
Welcome to UiPath Test Automation using UiPath Test Suite series part 4. In this session, we will cover Test Manager overview along with SAP heatmap.
The UiPath Test Manager overview with SAP heatmap webinar offers a concise yet comprehensive exploration of the role of a Test Manager within SAP environments, coupled with the utilization of heatmaps for effective testing strategies.
Participants will gain insights into the responsibilities, challenges, and best practices associated with test management in SAP projects. Additionally, the webinar delves into the significance of heatmaps as a visual aid for identifying testing priorities, areas of risk, and resource allocation within SAP landscapes. Through this session, attendees can expect to enhance their understanding of test management principles while learning practical approaches to optimize testing processes in SAP environments using heatmap visualization techniques
What will you get from this session?
1. Insights into SAP testing best practices
2. Heatmap utilization for testing
3. Optimization of testing processes
4. Demo
Topics covered:
Execution from the test manager
Orchestrator execution result
Defect reporting
SAP heatmap example with demo
Speaker:
Deepak Rai, Automation Practice Lead, Boundaryless Group and UiPath MVP
Epistemic Interaction - tuning interfaces to provide information for AI supportAlan Dix
Paper presented at SYNERGY workshop at AVI 2024, Genoa, Italy. 3rd June 2024
https://alandix.com/academic/papers/synergy2024-epistemic/
As machine learning integrates deeper into human-computer interactions, the concept of epistemic interaction emerges, aiming to refine these interactions to enhance system adaptability. This approach encourages minor, intentional adjustments in user behaviour to enrich the data available for system learning. This paper introduces epistemic interaction within the context of human-system communication, illustrating how deliberate interaction design can improve system understanding and adaptation. Through concrete examples, we demonstrate the potential of epistemic interaction to significantly advance human-computer interaction by leveraging intuitive human communication strategies to inform system design and functionality, offering a novel pathway for enriching user-system engagements.
LF Energy Webinar: Electrical Grid Modelling and Simulation Through PowSyBl -...DanBrown980551
Do you want to learn how to model and simulate an electrical network from scratch in under an hour?
Then welcome to this PowSyBl workshop, hosted by Rte, the French Transmission System Operator (TSO)!
During the webinar, you will discover the PowSyBl ecosystem as well as handle and study an electrical network through an interactive Python notebook.
PowSyBl is an open source project hosted by LF Energy, which offers a comprehensive set of features for electrical grid modelling and simulation. Among other advanced features, PowSyBl provides:
- A fully editable and extendable library for grid component modelling;
- Visualization tools to display your network;
- Grid simulation tools, such as power flows, security analyses (with or without remedial actions) and sensitivity analyses;
The framework is mostly written in Java, with a Python binding so that Python developers can access PowSyBl functionalities as well.
What you will learn during the webinar:
- For beginners: discover PowSyBl's functionalities through a quick general presentation and the notebook, without needing any expert coding skills;
- For advanced developers: master the skills to efficiently apply PowSyBl functionalities to your real-world scenarios.
Neuro-symbolic is not enough, we need neuro-*semantic*Frank van Harmelen
Neuro-symbolic (NeSy) AI is on the rise. However, simply machine learning on just any symbolic structure is not sufficient to really harvest the gains of NeSy. These will only be gained when the symbolic structures have an actual semantics. I give an operational definition of semantics as “predictable inference”.
All of this illustrated with link prediction over knowledge graphs, but the argument is general.
GDG Cloud Southlake #33: Boule & Rebala: Effective AppSec in SDLC using Deplo...James Anderson
Effective Application Security in Software Delivery lifecycle using Deployment Firewall and DBOM
The modern software delivery process (or the CI/CD process) includes many tools, distributed teams, open-source code, and cloud platforms. Constant focus on speed to release software to market, along with the traditional slow and manual security checks has caused gaps in continuous security as an important piece in the software supply chain. Today organizations feel more susceptible to external and internal cyber threats due to the vast attack surface in their applications supply chain and the lack of end-to-end governance and risk management.
The software team must secure its software delivery process to avoid vulnerability and security breaches. This needs to be achieved with existing tool chains and without extensive rework of the delivery processes. This talk will present strategies and techniques for providing visibility into the true risk of the existing vulnerabilities, preventing the introduction of security issues in the software, resolving vulnerabilities in production environments quickly, and capturing the deployment bill of materials (DBOM).
Speakers:
Bob Boule
Robert Boule is a technology enthusiast with PASSION for technology and making things work along with a knack for helping others understand how things work. He comes with around 20 years of solution engineering experience in application security, software continuous delivery, and SaaS platforms. He is known for his dynamic presentations in CI/CD and application security integrated in software delivery lifecycle.
Gopinath Rebala
Gopinath Rebala is the CTO of OpsMx, where he has overall responsibility for the machine learning and data processing architectures for Secure Software Delivery. Gopi also has a strong connection with our customers, leading design and architecture for strategic implementations. Gopi is a frequent speaker and well-known leader in continuous delivery and integrating security into software delivery.
GraphRAG is All You need? LLM & Knowledge GraphGuy Korland
Guy Korland, CEO and Co-founder of FalkorDB, will review two articles on the integration of language models with knowledge graphs.
1. Unifying Large Language Models and Knowledge Graphs: A Roadmap.
https://arxiv.org/abs/2306.08302
2. Microsoft Research's GraphRAG paper and a review paper on various uses of knowledge graphs:
https://www.microsoft.com/en-us/research/blog/graphrag-unlocking-llm-discovery-on-narrative-private-data/
Kubernetes & AI - Beauty and the Beast !?! @KCD Istanbul 2024Tobias Schneck
As AI technology is pushing into IT I was wondering myself, as an “infrastructure container kubernetes guy”, how get this fancy AI technology get managed from an infrastructure operational view? Is it possible to apply our lovely cloud native principals as well? What benefit’s both technologies could bring to each other?
Let me take this questions and provide you a short journey through existing deployment models and use cases for AI software. On practical examples, we discuss what cloud/on-premise strategy we may need for applying it to our own infrastructure to get it to work from an enterprise perspective. I want to give an overview about infrastructure requirements and technologies, what could be beneficial or limiting your AI use cases in an enterprise environment. An interactive Demo will give you some insides, what approaches I got already working for real.
UiPath Test Automation using UiPath Test Suite series, part 3DianaGray10
Welcome to UiPath Test Automation using UiPath Test Suite series part 3. In this session, we will cover desktop automation along with UI automation.
Topics covered:
UI automation Introduction,
UI automation Sample
Desktop automation flow
Pradeep Chinnala, Senior Consultant Automation Developer @WonderBotz and UiPath MVP
Deepak Rai, Automation Practice Lead, Boundaryless Group and UiPath MVP
Connector Corner: Automate dynamic content and events by pushing a buttonDianaGray10
Here is something new! In our next Connector Corner webinar, we will demonstrate how you can use a single workflow to:
Create a campaign using Mailchimp with merge tags/fields
Send an interactive Slack channel message (using buttons)
Have the message received by managers and peers along with a test email for review
But there’s more:
In a second workflow supporting the same use case, you’ll see:
Your campaign sent to target colleagues for approval
If the “Approve” button is clicked, a Jira/Zendesk ticket is created for the marketing design team
But—if the “Reject” button is pushed, colleagues will be alerted via Slack message
Join us to learn more about this new, human-in-the-loop capability, brought to you by Integration Service connectors.
And...
Speakers:
Akshay Agnihotri, Product Manager
Charlie Greenberg, Host
Connector Corner: Automate dynamic content and events by pushing a button
Iai rcl sa6_l_specsheet
1. RCL ROBO Cylinder
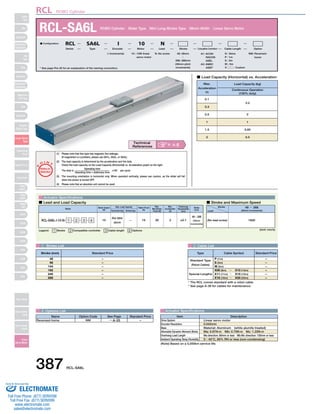
RCL-SA6L ROBO Cylinder Slider Type Mini Long-Stroke Type 58mm Width Linear Servo Motor
Series Type Encoder Motor Lead Stroke Compatible Controllers Cable Length Option
■ Load Capacity (Horizontal) vs. Acceleration
■ Configuration: RCL SA6L I 10 N
O I N
Operating time
The duty is ×100 per cycle.
Operating time + stationary time
Actuator Specifications
Max. Load Capacity (kg)
Continuous Operation
(100% duty)
Acceleration
(G)
3.2
2
1
0.65
0.5
0.1
0.3
0.5
1
1.5
2
I: Incremental N: No screw
■ Lead and Load Capacity ■ Stroke and Maximum Speed
Max. Load Capacity Positioning
Model (N) Stroke
(mm)
1 Stroke List 3 Cable List
Type Cable Symbol Standard Price
Standard Type
(Robot Cables)
Special Lengths
Actuator Specifications
P (1m)
S (3m)
M (5m)
X06 (6m) ~ X10 (10m)
X11 (11m) ~ X15 (15m)
X16 (16m) ~ X20 (20m)
(Note) Based on a 5,000km service life.
Legend: 1 Stroke 2 Compatible controller 3 Cable length 4 Options
Stroke
Lead
48 ~ 288
(48mm increments)
(No lead screw) 1600
(Unit: mm/s)
* See page Pre-35 for an explanation of the naming convention.
10 : 10W linear
servo motor
* The RCL comes standard with a robot cable.
* See page A-39 for cables for maintenance.
–
–
–
–
–
–
–
–
–
–
–
–
48
96
144
192
240
288
Item Description
Linear servo motor
0.042mm
Material: Aluminum (white alumite treated)
Ma: 0.87N∙m Mb: 0.75N∙m Mc: 1.22N∙m
Ma direction: 80mm or less Mb∙Mc direction: 120mm or less
0~40°C, 85% RH or less (non-condensing)
Drive System
Encoder Resolution
Base
Allowable Dynamic Moment (Note)
Overhang Load Length
Ambient Operating Temp./Humidity
Motor Output
(W) Horizontal (kg) Vertical (kg)
Repeatability
(mm)
Max.
Acceleration
(G)
Max.
Momentary
Thrust (N)
Rated Thrust
RCL-SA6L-I-10-N- 1 - 2 - 3 - 4 10
See table
above
− 10 30 2
48~288
(48mm
increments)
±0.1
4 Options List
Name Option Code See Page Standard Price
Reversed-home NM → A-33 –
N : None
P : 1m
S : 3m
M : 5m
X □□ : Custom
NM: Reversed-home
48: 48mm
〜
288: 288mm
(48mm pitch
increments)
P. A-5 Technical
References
A1: ACON
RACON
ASEL
A3: AMEC
ASEP
Stroke (mm) Standard Price
P
T
Notes on
Selection
(1) Please note that this type has magnetic flux leakage.
(If magnetism is a problem, please use SA1L, SA2L, or SA3L)
(2) The load capacity is determined by the acceleration and the duty.
Check the load capacity on the Load Capacity (Horizontal) vs. Acceleration graph on the right.
(3) The mounting orientation is horizontal only. When operated vertically, please use caution, as the slider will fall
when the power is turned OFF.
(4) Please note that an absolute unit cannot be used.
387 RCL-SA6L
Slider
Type
Mini
Standard
Controllers
Integrated
Rod
Type
Mini
Standard
Controllers
Integrated
Table/Arm
/Flat Type
Mini
Standard
Gripper/
Rotary Type
Linear Servo
Type
Cleanroom
Proof
Splash Proof
Controllers
PMEC
/AMEC
PSEP
/ASEP
ROBO
NET
ERC2
PCON
ACON
SCON
PSEL
ASEL
SSEL
XSEL
Pulse Motor
Servo Motor
(24V)
Servo Motor
(200V)
Linear
Servo Motor
Sold & Serviced By:
ELECTROMATE
Toll Free Phone (877) SERVO98
Toll Free Fax (877) SERV099
www.electromate.com
sales@electromate.com
2. 30
8
2-ø3H7 depth 3.5
4-M3 depth 5 (through)
18
25±0.02
L (Stroke+114)
27 Stroke 48
Home
39
(1)
M.E. *2
RCL ROBO Cylinder
Cable joint
connector*1
9 ø4H7 depth 4
48
C 24
B-M4 depth 5
A×48P
39.5 18.5
1
D
Oblong hole
depth 4 (D section)
18.5
36
(30.3)
(42)
23
13
Ma moment offset
reference position
(0.8) 58 (0.8)
5
Details D
+0.012
4H7 0
1
ME : Mechanical end
(1)
S.E.
18
(Reamer hole
tolerance ±0.02)
Secure at
least 100
(300)
20.7
M.E.
SE : Stroke end
Dimensions
*1 The motor-encoder cable is connected here.
See page A-39 for details on cables.
*2 When homing, the slider moves to the
mechanical end; therefore, please watch for any
interference with the surrounding objects.
■ Dimensions and Weight by Stroke
Stroke
L
A
B
C
Weight (kg)
48 96 144 192 240 288
162
3
4
96
0.67
210
4
5
144
0.8
258
5
6
192
0.93
306
6
7
240
1.07
354
7
8
288
1.2
402
8
9
336
1.34
For Special Orders P. A-9
2 Compatible controller
The RCL series actuators can operate with the controllers below. Select the controller according to your usage.
Name External View Model Description Max. Positioning Points Input Voltage Power Supply Capacity Standard Price See Page
* This is for the single-axis ASEL.
Solenoid Valve Type
AMEC-C-10I-NP-2-1 Easy–to–use controller, even for beginners
3 points
AC100V 2.4A rated – → P477
ASEP-C-10I-NP-2-0
Operable with same signal as solenoid valve.
Supports both single and double solenoid types.
No homing necessary with simple absolute type.
DC24V 6.4A max.
–
→ P487
Splash–Proof
Solenoid Valve Type
ASEP-CW-10I-NP-2-0 –
Positioner Type ACON-C-10I-NP-2-0
Positioning is possible for up to 512 points 512 points
–
→ P535
Safety–Compliant
Positioner Type
ACON-CG-10I-NP-2-0 –
Pulse Train Input Type
(Differential Line Driver)
ACON-PL-10I-NP-2-0
Pulse train input type with
differential line driver support
(−)
–
Pulse Train Input Type
(Open Collector)
ACON-PO-10I-NP-2-0 Pulse train input type with open collector support –
Serial
Communication Type
ACON-SE-10I-N-0-0 Dedicated to serial communication 64 points –
Field Network Type RACON-10 Dedicated to field network 768 points – → P503
Program Control
Type
ASEL-C-1-10I-NP-2-0
Programmed operation is possible
Operation is possible on up to 2 axes
1500 points – → P567
RCL-SA6L 388
Slider
Type
Mini
Standard
Controllers
Integrated
Rod
Type
Mini
Standard
Controllers
Integrated
Table/Arm
/Flat Type
Mini
Standard
Gripper/
Rotary Type
Linear Servo
Type
Cleanroom
Proof
Splash Proof
Controllers
PMEC
/AMEC
PSEP
/ASEP
ROBO
NET
ERC2
PCON
ACON
SCON
PSEL
ASEL
SSEL
XSEL
Pulse Motor
Servo Motor
(24V)
Servo Motor
(200V)
Linear
Servo Motor
Sold & Serviced By:
ELECTROMATE
Toll Free Phone (877) SERVO98
Toll Free Fax (877) SERV099
www.electromate.com
sales@electromate.com