Download to read offline
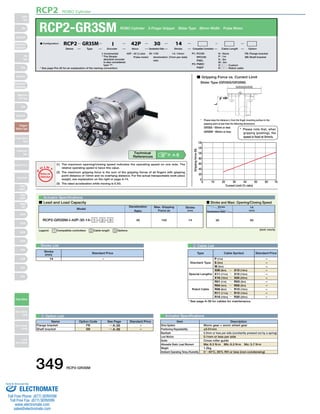
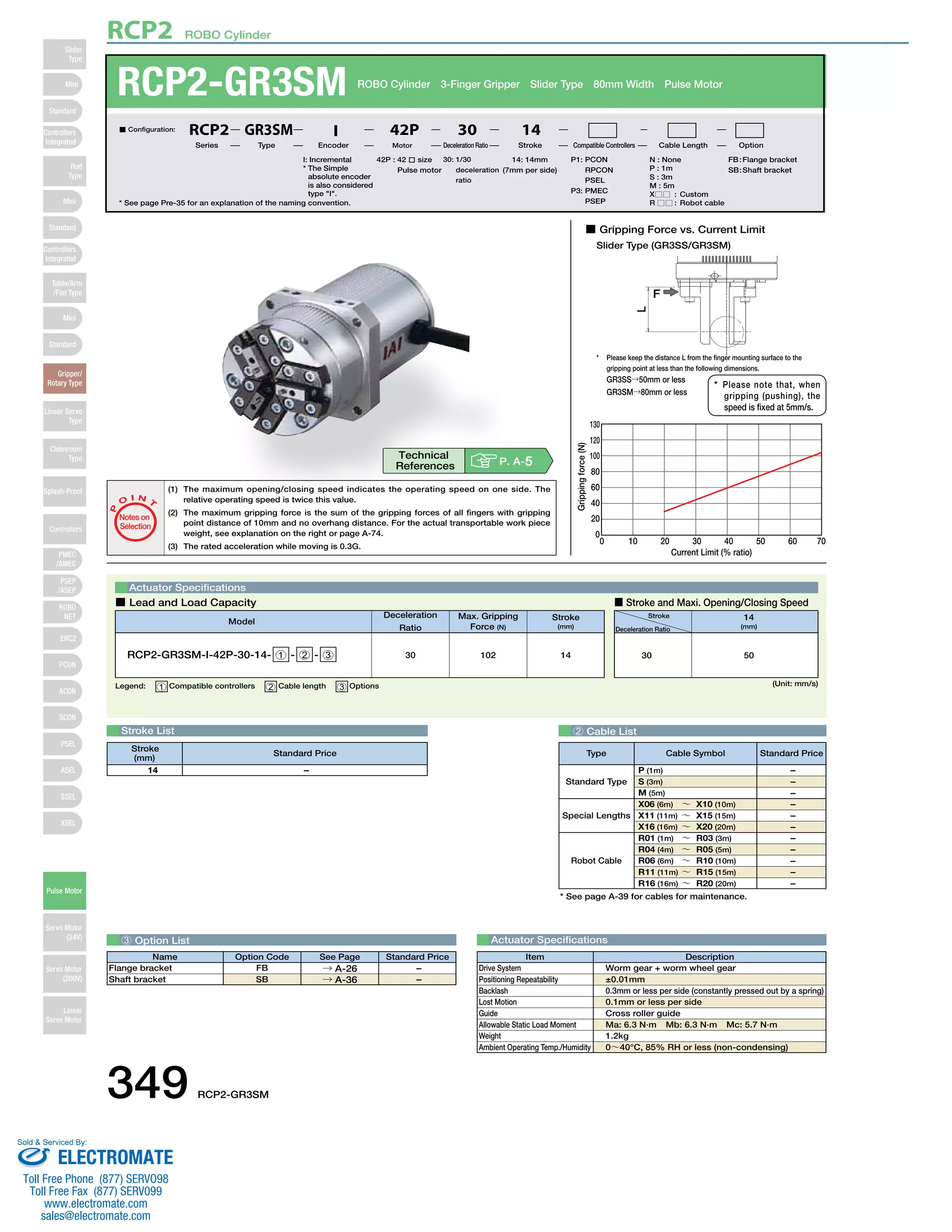

The document provides specifications for the RCP2-GR3SM ROBO Cylinder 3-Finger Gripper Slider Type 80mm Width Pulse Motor, including: 1) It has a stroke of 14mm and deceleration ratio of 30 with a maximum gripping force of 130N. 2) It is compatible with various ROBO controllers like the PMEC, PSEP, and PCON series. 3) Additional details are provided on its dimensions, mounting, actuating specifications, and compatible cables and options.






































































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)
















