Download to read offline

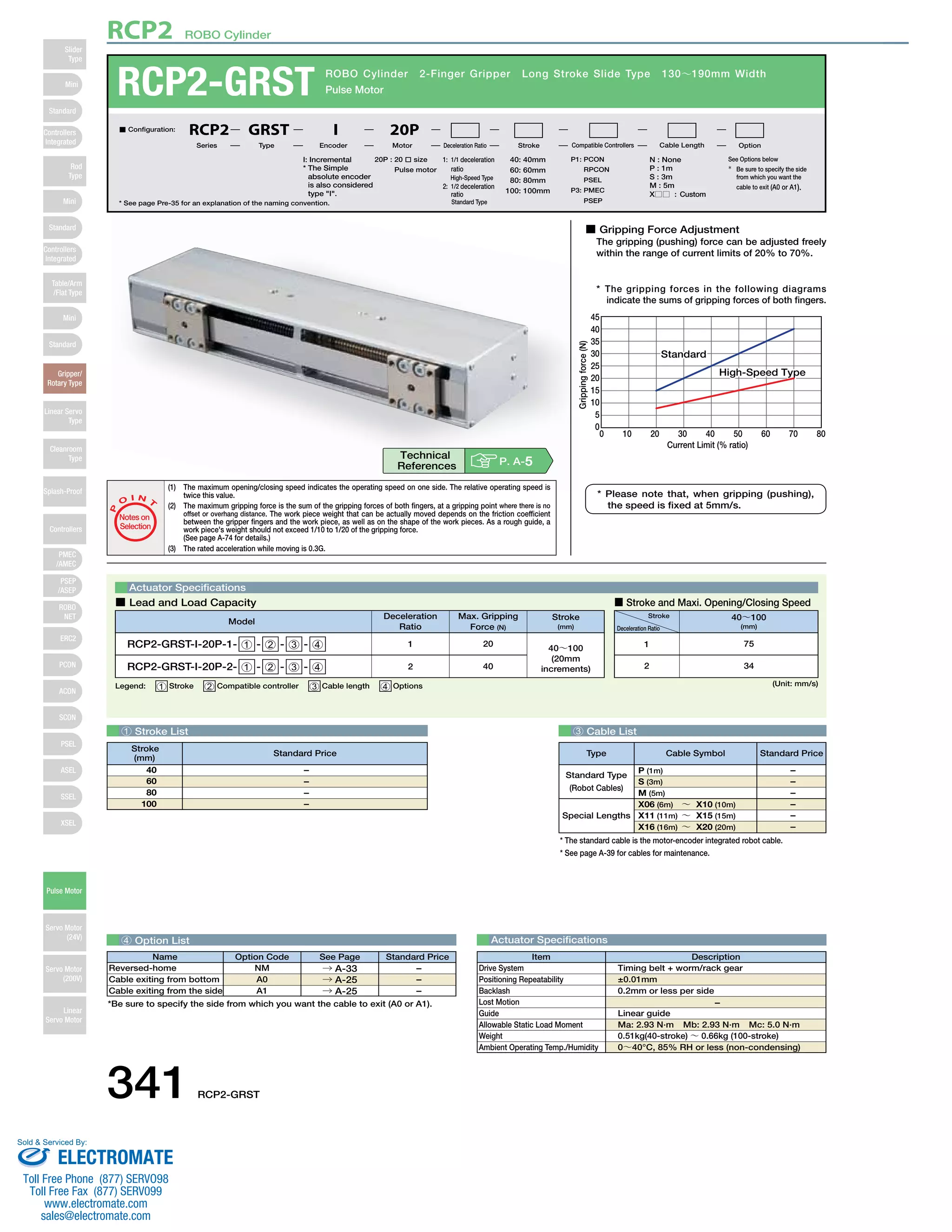
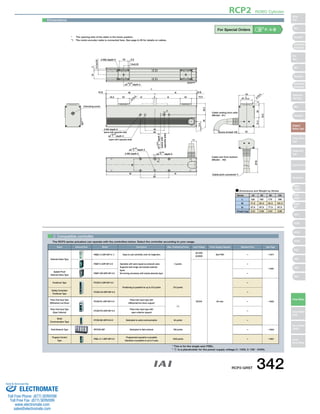

The document provides specifications for the RCP2-GRST ROBO Cylinder 2-Finger Gripper Long Stroke Slide Type actuator. It has a stroke range of 130-190mm, maximum gripping force of 20-40N, and deceleration ratio of 1/2. It can be operated by various ROBO controllers including the PMEC, PSEP, PCON and PSEL models.






















































































