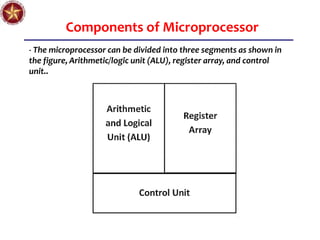
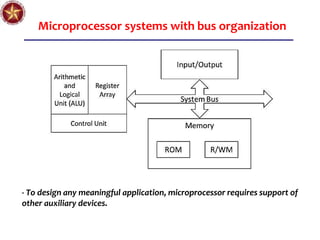
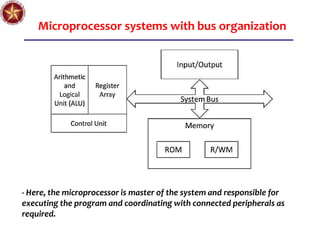
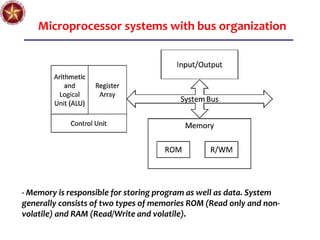
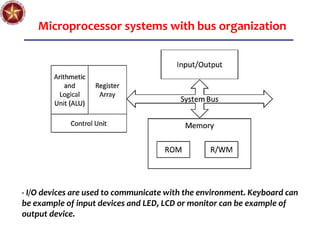
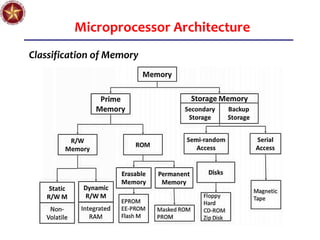
This document provides an introduction to microprocessors, including their components, classifications, and how they interface with memory and I/O devices. It discusses the components of a microprocessor including the ALU, register array, and control unit. It also describes different types of memory like ROM, RAM, SRAM and DRAM. Finally, it summarizes the two main methods for microprocessor I/O interfacing: direct I/O and memory-mapped I/O.