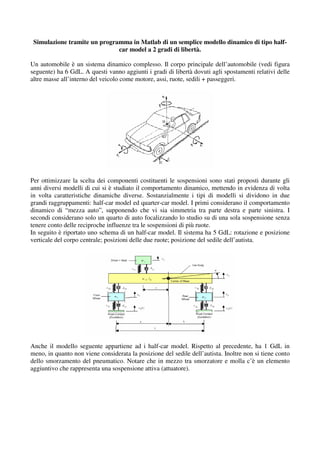
Il documento descrive la simulazione di un modello dinamico half-car a 2 gradi di libertà per un veicolo, evidenziando le equazioni che governano il comportamento dinamico e l'equilibrio del sistema. Viene presentato un approccio numerico per risolvere il sistema di equazioni differenziali e si discute l'impatto di un dosso sul comportamento dell'auto. Infine, si menzionano i parametri di progetto e le caratteristiche delle sospensioni da ottimizzare per migliorare le prestazioni del veicolo.













































![Equilibrio sul piano inclinato [s. caltabiano]](https://cdn.slidesharecdn.com/ss_thumbnails/equilibriosulpianoinclinatos-181017133820-thumbnail.jpg?width=640&height=640&fit=bounds)






