This document contains 27 solved math problems involving vectors and matrices. The problems demonstrate various vector and matrix operations like addition, subtraction, multiplication, and dot products. They also show how to plot functions and find maximum values. The problems are solved using MATLAB code and the results are displayed in the command window.

![2 Chapter 3: Solved Problems
Problem 4
>> t=0:8
t =
0 1 2 3 4 5 6 7 8
>> y=20*t.^(2/3)./(t+1)-(t+1).^2./exp(0.3*t+5)+2./
(t+1)
y =
1.9933 10.9800 11.2161 10.8566 10.4286
10.0259 9.6652 9.3455 9.0616
Problem 5
Script file
h=2; g=9.81;
v=sqrt(2*g*h);
n=1:8;
t=v/g*0.85.^n;
Table=[n' t']
Command Window
Table =
1.0000 0.5428
2.0000 0.4614
3.0000 0.3922
4.0000 0.3333
5.0000 0.2833
6.0000 0.2408
7.0000 0.2047
8.0000 0.1740](https://image.slidesharecdn.com/gilatch03-220328131717/85/Gilat_ch03-pdf-2-320.jpg)

![4 Chapter 3: Solved Problems
Problem 8
8.a
>> ua=[23.5 -17 6];
>> uMa=sqrt(ua(1)^2+ua(2)^2+ua(3)^2)
uMa =
29.618
8.b
>> ub=[23.5 -17 6];
>> uMb=sqrt(sum(ua.^2))
uMb =
29.618
Problem 9
>> u=[-8 -14 25];
>> un=u./sqrt(sum(u.^2))
un =
-0.2689 -0.4706 0.8404
Problem 10
>> v=[3 -2 4];
>> u=[5 3 -1];
>> v.*u
ans =
15 -6 -4
>> v*u'
ans =
5
>> v'*u
ans =
15 9 -3
-10 -6 2
20 12 -4](https://image.slidesharecdn.com/gilatch03-220328131717/85/Gilat_ch03-pdf-4-320.jpg)
![Chapter 3: Solved Problems 5
Problem 11
>> va=[6.5 -5 -4];
>> ua=[-3 8 -2];
>> dotuva=sum(u.*v)
dotuva =
-51.5000
>> ub=[-3 8 -2];
>> vb=[6.5; -5; -4];
>> ub*vb
ans =
-51.5000
>> vc=[6.5 -5 -4];
>> uc=[-3 8 -2];
>> dotuvc=dot(vc,uc)
dotuvc =
-51.5000
Problem 12
>> v=2:2:10
v =
2 4 6 8 10
>> a=1./v
a =
0.5000 0.2500 0.1667 0.1250 0.1000
>> b=1./v.^2
b =
0.2500 0.0625 0.0278 0.0156 0.0100
>> c=v/2
c =
1 2 3 4 5
>> d=v./v
d =
1 1 1 1 1
>>](https://image.slidesharecdn.com/gilatch03-220328131717/85/Gilat_ch03-pdf-5-320.jpg)

![Chapter 3: Solved Problems 7
Problem 15
Script file:
clear, clc
p=2.3; w=5.67;
t=1:5;
x=2.8:-0.3:1.6;
y=4:3:17;
disp('Part a')
T=p*(x+y).^2*w./y
disp('Part b')
S=p*(x+y).^2./(w*y)+w*x.*t./(p*y)
Command Window:
Part a
T =
150.7540 168.1357 194.1022 222.7102 252.4738
Part b
S =
6.4149 6.9908 7.6646 8.3687 9.0859
Problem 16
Script file:
clear, clc
A=[2 0 0]; B=[10 3 0]; C=[4 6 0];
rAB=B-A
rAC=C-A
cross(rAB,rAC);
Area=sqrt(sum(cross(rAB,rAC).^2))
Command Window
rAB =
8 3 0
rAC =
2 6 0
Area =
42](https://image.slidesharecdn.com/gilatch03-220328131717/85/Gilat_ch03-pdf-7-320.jpg)
![8 Chapter 3: Solved Problems
Problem 17
Script file
clear, clc
u=[-2 6 5];
v=[5 -1 3];
w=[4 7 -2];
LHS=cross(u,cross(v,w))
RHS=v*dot(u,w)-w*dot(u,v)
Command Window:
LHS =
124 -17 70
RHS =
124 -17 70
Problem 18
Script file:
clear, clc
r1=[3 -2 1];
r2=[1 2 -4];
Lr1=sqrt(dot(r1,r1));
Lr2=sqrt(dot(r2,r2));
th=acosd(dot(r1,r2)/(Lr1*Lr2))
Command Window:
th =
106.9541](https://image.slidesharecdn.com/gilatch03-220328131717/85/Gilat_ch03-pdf-8-320.jpg)
![10 Chapter 3: Solved Problems
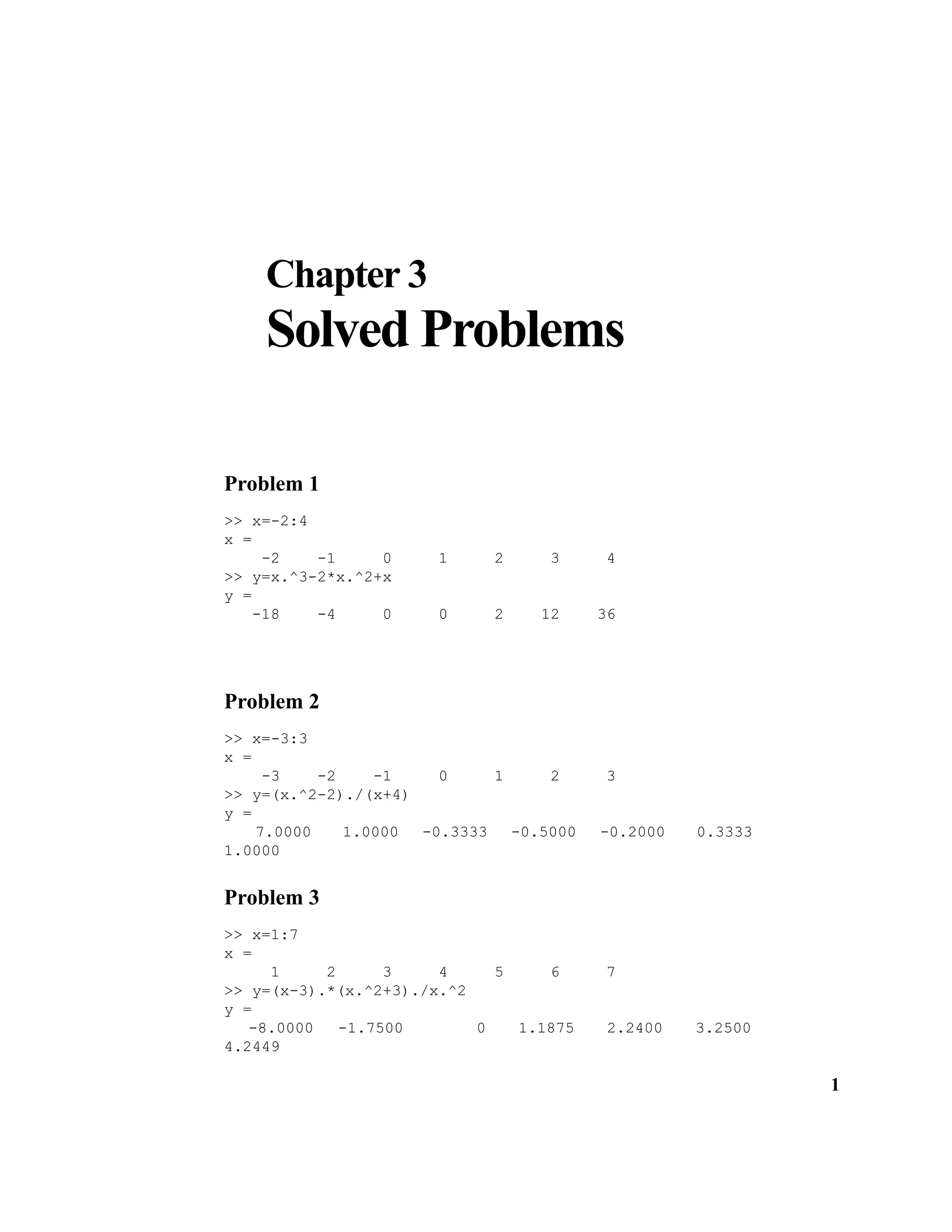
Problem 20
Script file:
clear, clc
format short g
g=9.81;
vA=560; thA=43;
vB=680; thB=50;
tA=2*vA*sind(thA)/g;
tB=2*vB*sind(thB)/g;
tf=tA;
t=linspace(0,tf,11);
xA=vA*cosd(thA)*t;
yA=vA*sind(thA)*t-0.5*g*t.^2;
xB=vB*cosd(thB)*t;
yB=vB*sind(thB)*t-0.5*g*t.^2;
rABx=xB-xA;
rABy=yB-yA;
Table=[t' rABx' rABy'];
disp(Table)
Command Window:
0 0 0
7.7863 214.42 1082.2
15.573 428.83 2164.5
23.359 643.25 3246.7
31.145 857.66 4328.9
38.932 1072.1 5411.1
46.718 1286.5 6493.4
54.504 1500.9 7575.6
62.291 1715.3 8657.8
70.077 1929.7 9740.1
77.863 2144.2 10822](https://image.slidesharecdn.com/gilatch03-220328131717/85/Gilat_ch03-pdf-10-320.jpg)
![Chapter 3: Solved Problems 11
Problem 21
Script file:
clear,clc
format long
x=[1.5 1 0.5 0.1 0.01 0.001 0.00001];
y=sin(x)./x
Command Window:
y =
0.664996657736036 0.841470984807897 0.958851077208406
0.998334166468282 0.999983333416666 0.999999833333342
0.999999999983333
Problem 22
Script file:
clear, clc
format long
x=[5 3 2 1.5 1.1 1.001 1.00001];
y=(x.^2-1)./(x-1)
Command Window:
y =
6.000000000000000 4.000000000000000
3.000000000000000 2.500000000000000
2.100000000000000 2.000999999999918
2.000010000000827](https://image.slidesharecdn.com/gilatch03-220328131717/85/Gilat_ch03-pdf-11-320.jpg)


![14 Chapter 3: Solved Problems
Part c
Sc =
3.141592653589794
cPercentError =
2.827159716856460e-014
>>
Problem 25
Script file:
clear,clc
clear,clc
Lmax=58; K=0.45; tau=0.65;
t=0:5;
L=Lmax*(1-exp(-K*(t+tau)))
Command Window:
L =
14.7091 30.3965 40.3992 46.7772 50.8441
53.4372
Problem 26
Script file:
clear, clc
th=75; v=110; g=9.81;
a=g/(2*v^2*(cosd(th))^2);
b=-tand(th);
c=200;
d=sqrt(b^2-4*a*c);
x1=(-b+d)/(2*a);
x2=(-b-d)/(2*a);
xp=linspace(0,x1,100);
y=tand(th).*xp-g/(2*v^2*(cosd(th))^2)*xp.^2;
plot(xp,y)
[hm, xm]=max(y);
hmax=hm](https://image.slidesharecdn.com/gilatch03-220328131717/85/Gilat_ch03-pdf-14-320.jpg)
![Chapter 3: Solved Problems 15
xhmax=xp(xm)
Command Window:
hmax =
575.3948
xhmax =
309.6821
Problem 27
>> A=[2 4 -1; 3 1 -5; 0 1 4];
>> B=[-2 5 0; -3 2 7; -1 6 9];
>> C=[0 3 5; 2 1 0; 4 6 -3];
27a
>> A+B
ans =
0 9 -1
0 3 2
-1 7 13
>> B+A
ans =
0 9 -1
0 3 2
-1 7 13
27.b
>> A+(B+C)
ans =
0 12 4
2 4 2
3 13 10
>> (A+B)+C
ans =
0 12 4
2 4 2
3 13 10
27.c
>> 5*(A+C)
ans =
10 35 20](https://image.slidesharecdn.com/gilatch03-220328131717/85/Gilat_ch03-pdf-15-320.jpg)
![16 Chapter 3: Solved Problems
25 10 -25
20 35 5
>> 5*A+5*C
ans =
10 35 20
25 10 -25
20 35 5
27.d
>> A*(B+C)
ans =
-11 16 32
-22 -33 -8
11 51 31
>> A*B+A*C
ans =
-11 16 32
-22 -33 -8
11 51 31
Problem 28
>> A=[2 4 -1; 3 1 -5; 0 1 4];
>> B=[-2 5 0; -3 2 7; -1 6 9];
>> C=[0 3 5; 2 1 0; 4 6 -3];
28.a
>> A*B
ans =
-15 12 19
-4 -13 -38
-7 26 43
>> B*A
ans =
11 -3 -23
0 -3 21
16 11 7
Answer: No, A*B does not equal B*A
28.b
>> A*(B*C)
ans =
100 81 -132
-178 -253 94](https://image.slidesharecdn.com/gilatch03-220328131717/85/Gilat_ch03-pdf-16-320.jpg)



![20 Chapter 3: Solved Problems
0.095491071428571
E =
0.038250669386692
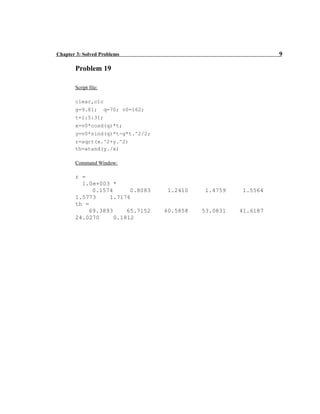
Problem 31
>> A=[3 -2 5; -4.5 2 3; 5 1 -2.5];
>> C=[7.5;5.5;4.5];
>> x=AC
x =
1.2692
2.8113
1.8630
Problem 32
>> A=[3 1.5 1 0.5 4; -2 1 4 -3.5 2; 6 -3 2 2.5 1; 1 4 -
3 0.5 -2; 3 2 -1 1.5 -3];
>> C=[-11.75; 19; -23; -1.5; -3.5];
>> x=AC
x =
-4.0000
2.5000
4.0000
1.0000
-2.0000](https://image.slidesharecdn.com/gilatch03-220328131717/85/Gilat_ch03-pdf-20-320.jpg)
![Chapter 3: Solved Problems 21
Problem 33
x Gallons oforange blend
y Gallons of pineapple blend
z Gallons of mango blend
Command window:
>> A=0.25*[3 1 0.5; 0.75 2.5 0.5; 0.25 0.5 3];
>> C=[7600; 4900; 3500];
>> x=AC
x =
1.0e+003 *
8.0000
4.8000
3.2000
8000 Gallons oforange blend
4800 Gallons of pineapple blend
3200 Gallons of mango blend
3 0.25x
⋅ 0.25y 0.5 0.25z
⋅
+ + 7600
=
0.75 0.25x
⋅ 2.5 0.25y
⋅ 0.5 0.25z
⋅
+ + 4900
=
0.25 0.25x
⋅ 0.5 0.25y
⋅ 3 0.25z
⋅
+ + 3500
=](https://image.slidesharecdn.com/gilatch03-220328131717/85/Gilat_ch03-pdf-21-320.jpg)
![22 Chapter 3: Solved Problems
Problem 34
Script file:
clear, clc
V1=12; V2=24;
R1=20; R2=12; R3=8; R4=6;
R5=10;
A=[-(R1+R2) R1 R2 0
R1 -(R1+R3) 0 0
R2 0 -(R2+R4) R4
0 0 R4 -(R4+R5)]
B=[V1; V2; -V2; 0]
I=AB
% A table with the value of the current in each resistor
RI=[1 abs(I(1)-I(2))
2 abs(I(1)-I(3))
3 abs(I(2))
4 abs(I(3)-I(4))
5 abs(I(4))]
Command Window:
A =
-32 20 12 0
20 -28 0 0
12 0 -18 6
0 0 6 -16
B =
12
24
-24
0
I =
-1.2667
-1.7619
0.5587
0.2095
RI =
1.0000 0.4952
2.0000 1.8254
3.0000 1.7619
+ _
+
_
R1 R2
R3
R5
R4
V1
V2](https://image.slidesharecdn.com/gilatch03-220328131717/85/Gilat_ch03-pdf-22-320.jpg)
![24 Chapter 3: Solved Problems
Problem 35
Script file:
V1=18; V2=30; V3=18;
R1=10; R2=20; R3=8; R4=16;
R5=14; R6=24; R7=20; R8=12;
A=[(R1+R2) 0 -R2 0 0 0
0 R3 0 -R3 0 0
-R2 0 (R2+R4) 0 0 0
0 -R3 0 (R3+R5+R7) -R5 -R7
0 0 0 -R5 (R5+R6) 0
0 0 0 -R7 0 (R7+R8)]
B=[0; -V1; -V2; V2; V3; -V3]
I=AB
% A table with the value of the current in each resistor
RI=[1 abs(I(1))
2 abs(I(1)-I(3))
3 abs(I(2)-I(4))
4 abs(I(3))
5 abs(I(4)-I(5))
6 abs(I(5))
7 abs(I(4)-I(6))
8 abs(I(6))]
Command Window:
A =
30 0 -20 0 0 0
0 8 0 -8 0 0
-20 0 36 0 0 0
0 -8 0 42 -14 -20
0 0 0 -14 38 0
0 0 0 -20 0 32
B =
0
-18
-30
30
18
-18
+ _
+
_
R1
R2 R3
R5
R4
V1
V2
+ _
V3
R6
R7
R8](https://image.slidesharecdn.com/gilatch03-220328131717/85/Gilat_ch03-pdf-24-320.jpg)





















![Trial pahang 2014 spm add math k2 dan skema [scan]](https://cdn.slidesharecdn.com/ss_thumbnails/trialpahang2014spmaddmathk2danskemascan-141015101353-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)