Downloaded 79 times


![Quasi Equilibrium State Pendulum
EE Department, WCE Sangli 7
Acknowledgement
We take this opportunity to express our gratitude to Dr. D R Patil for
permitting and encouraging us to take up this project and complete it successfully. Also, Dr.
Enikov and Dr. Campa, for their IEEE transactions paper established our interest and base for
taking up this project and helping out our enquiries over email.
We thank the Head of Department (Electrical Engineering) Prof. Dr. D S
More, our faculty, and non-teaching staff of Electrical Department who offered their valuable
time, guidance, and assistance directly or indirectly to carry out the project successfully.
Our sincere gratitude to our friends for constantly motivating us to fruitfully
completing the work.
We also thank our college’s Mechanical Workshop Staff & acknowledge
facilities provided by the Electrical Engineering Department.
Atharva S Kshirsagar [1]
Vijay S Patil [1]
[1]
Dept. of Electrical Engineering
Walchand College of Engineering, Sangli
Maharashtra.](https://image.slidesharecdn.com/ae821c5a-4ca6-46ee-92c5-68470ea40513-150614142204-lva1-app6891/85/FINAL-PROJ-REP-4-320.jpg)





![Quasi Equilibrium State Pendulum
EE Department, WCE Sangli 20
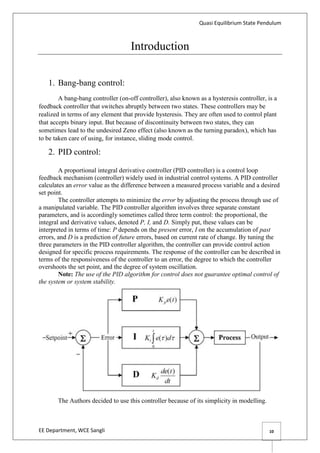
3. After Perturbation, there was steady state error but oscillations of constant
magnitude.
P = 0.295
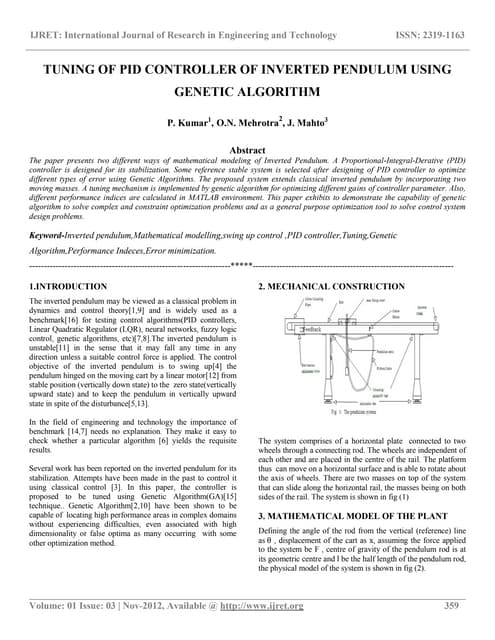
Tuning of a PID controller using Ziegler-Nichols Method
The PID controller encapsulates three of the most important controller structures in a single
package. The parallel form of a PID controller has transfer function:
C(S) = KP + (KI/S) + (Kd S)
=KP [1 + (1/TIS) + Td S] where:
KP = Proportional Gain
KI = Integral Gain
Kd= Derivative gain
Steps to determine PID controller parameters:
1. Reduce the integrator and derivative gains to 0.
2. Increase Kp from 0 to some critical value Kp=Kc at which sustained oscillations occur
3. Note the value Kc and the corresponding period of sustained oscillation, Tc
4. The controller gains are now specified as follows
PID Type Kp TI Td
P 0.5Ku Inf 0
PI 0.45Ku 0.833Tu 0
PID 0.6 Ku 0.5Tu 0.125Tu](https://image.slidesharecdn.com/ae821c5a-4ca6-46ee-92c5-68470ea40513-150614142204-lva1-app6891/85/FINAL-PROJ-REP-17-320.jpg)



![Quasi Equilibrium State Pendulum
EE Department, WCE Sangli 25
Conclusion
The project described is a low cost and low maintenance platform suitable for lab
courses in dynamics and control systems. Many interesting experiments, for reinforcing
classroom concepts, can be developed. The platform can also be easily modified to
investigate complex and higher order systems.
As stated in the introduction PID control is not so robust and fails to give precise
results, having precision about 70%. The steady state error can be reduced by applying a
correct Proportional gain Kp, while the transient response can be bettered using Derivative
gain Kd.
Applications of this project as a model for feedback control, varying from Vehicle
dynamics to Robotics.
References
1. E. T. Enikov, Aeropendulum project, 2011 [Online]. http://aeropendulum.arizona.edu/
2. Slotine and Li, Applied Nonlinear Control, Prentice Hall, NJ – 1991.
3. Kizmaz, H., Sliding Mode Control of Suspended Pendulum, Modern Electric Power
Systems Proceedings – 2010.
4. M. Morari and E. Zafiriou, Robust Process Control, Englewood Cliffs, PH NJ – 1999.
5. V. Yurkevich, PID controller via singular perturbation technique, APEIE – 2009.
6. I.D. Landau et al., Adaptive Control, Communications and Control Engineering,
Springer – 2011.
7. Zadeh L. A. Fuzzy Sets. Intl J. Information Control – 1965.
8. Paul Oh, Motor-Propeller Damped Compound Pendulum Experiment, Mechanical
Engineering Department, Drexel University.
9. arduino.cc
10. scilab.org
11. B. Douglas, Control Systems Lectures, youtube.com](https://image.slidesharecdn.com/ae821c5a-4ca6-46ee-92c5-68470ea40513-150614142204-lva1-app6891/85/FINAL-PROJ-REP-22-320.jpg)

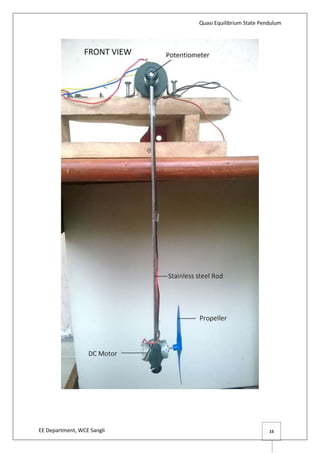
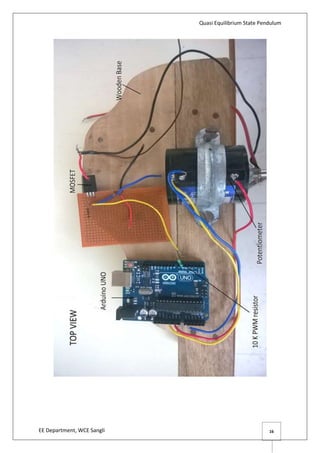
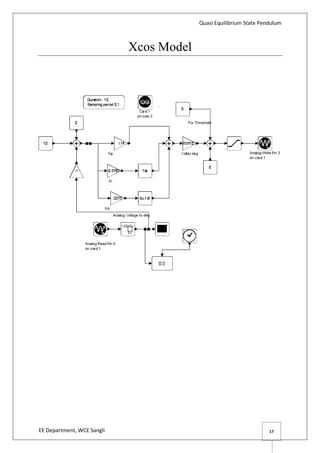
The document describes a project to create a quasi-equilibrium state pendulum using a DC motor attached to a rod. The motor drives a propeller to allow the rod to swing. Angular position is measured by a potentiometer. The system is modeled and controlled using Scilab/Xcos. Initial PID tuning is done using Ziegler-Nichols method. Future work proposed includes expanding the controllable angle range and implementing advanced controllers like adaptive control to improve response. The appendix lists components used and conclusions reiterate the potential applications and limitations of PID control for this system.