This document describes a project to monitor and control water level in a tank using an ultrasonic sensor and Arduino with a real-time operating system. It uses an ultrasonic sensor to constantly monitor water level and a pump to fill the tank when needed. The system is modeled as 4 tasks - one to read sensor data, one to control the pump, one to update an LCD display, and an idle task. The tasks communicate using semaphores to synchronize access to shared resources.
![P a g e 1 | 19
1. INTRODUCTION:
This is simple water level controller but the new thing we’ll be using is modeling this
application in a real time embedded system using RTOS (Real Time Operating System).
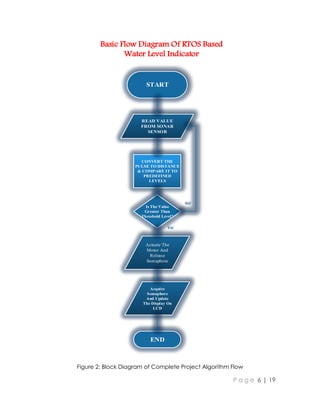
What this Embedded system will do is plain simple. It will constantly monitor the level of
our water tank using an “Ultrasonic Sound Sensor” (SONAR) and check the level of
water using the reelection of sound it receives back generated from the speaker.
After that it will check if the water Tank is full or not according to the readings it received
from the sensor. If the level of water is not at the specified position. It will simply actuate
the water pump using “Arduino’s ATmega328P” until it is reached to the “full” level.
All of the status is being shown on “16x2 LCD display” which will display information
like current motor status, water tank level percentage. ]
Why SONAR sensor?
We have two methods for sensing water level
a) Contact methods are resistive method, capacitive and inductive methods
(magnetostriction).
b) Contactless methods are optical method, radar and ultrasonic method. Because we
didn’t want to affect the quality of water in tank we implement one of the
contactless methods i-e ultrasonic sensor
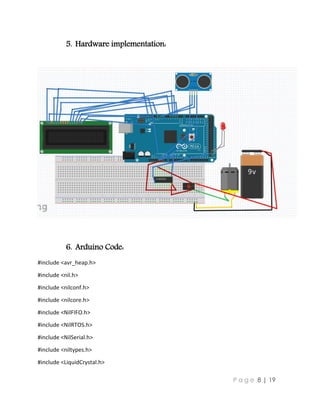
2. Equipment:
a. Arduino Mega w/(AT mega 2560)
b. SONAR sensor HC SR04
c. 16x2 characters Alphanumeric LCD
d. Ethernet cables for extension
e. Water Tank
f. Battery Pack 5v/Charger](https://image.slidesharecdn.com/7ea41779-3b4e-43af-9e43-623cc2eb8519-160724160105/85/ESD_Project-Report-2-320.jpg)