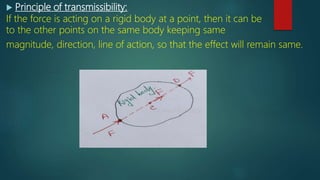
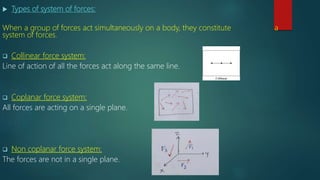
Engineering mechanics deals with analyzing how physical bodies interact with applied forces and motion. It uses classical Newtonian mechanics to study problems in engineering. A rigid body is one that does not deform under applied forces, and mechanics examines the motion of particles, rigid bodies, and continuous distributions of mass called continua. Forces have magnitude, direction, and point and line of application, and can be combined into systems acting on bodies to understand their effects.