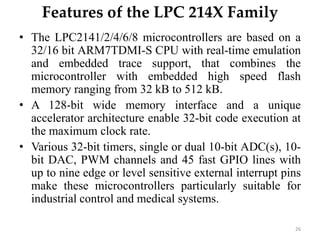
The document provides an overview of ARM architecture and its various versions, highlighting key features such as the instruction set, status registers, and data types. It discusses the evolution of ARM, including the introduction of the Thumb instruction set and details on specific ARM versions, like version 6 and its improvements. Additionally, the document covers the architecture and features of the LPC 214x microcontroller family, emphasizing its real-time capabilities and various peripherals.









![Load and store instructions
• Load-Store instructions are used to transfer
the Values between registers and memory.
– LDRB and STRB load and store bytes rather than
whole words, while LDRH and SDRH operate on
half-words and LDRSH extends the sign bit on
loading.
For example: LDR r0,[r1],STR r0,[r1]
• The following load and store instructions are
available:
– Load and Store Register
– Load and Store Multiple registers on page
– Load and Store Register Exclusive on page.
19](https://image.slidesharecdn.com/ec8791ertsunit-2ppt-240425003912-4c69a80e/85/EC8791-ARM-Processor-and-Peripherals-pptx-19-320.jpg)