The document provides detailed lecture notes on dynamic linear system analysis, including time and frequency domain analysis, state equations, RLC network analysis, and impulse response. It discusses concepts like state variables, degenerate networks, and methods for solving RLC equations using Taylor expansion and Laplace transforms. Key examples illustrate how to derive transfer functions and the correspondence between time-domain and frequency-domain representations.
![Lecture2.17
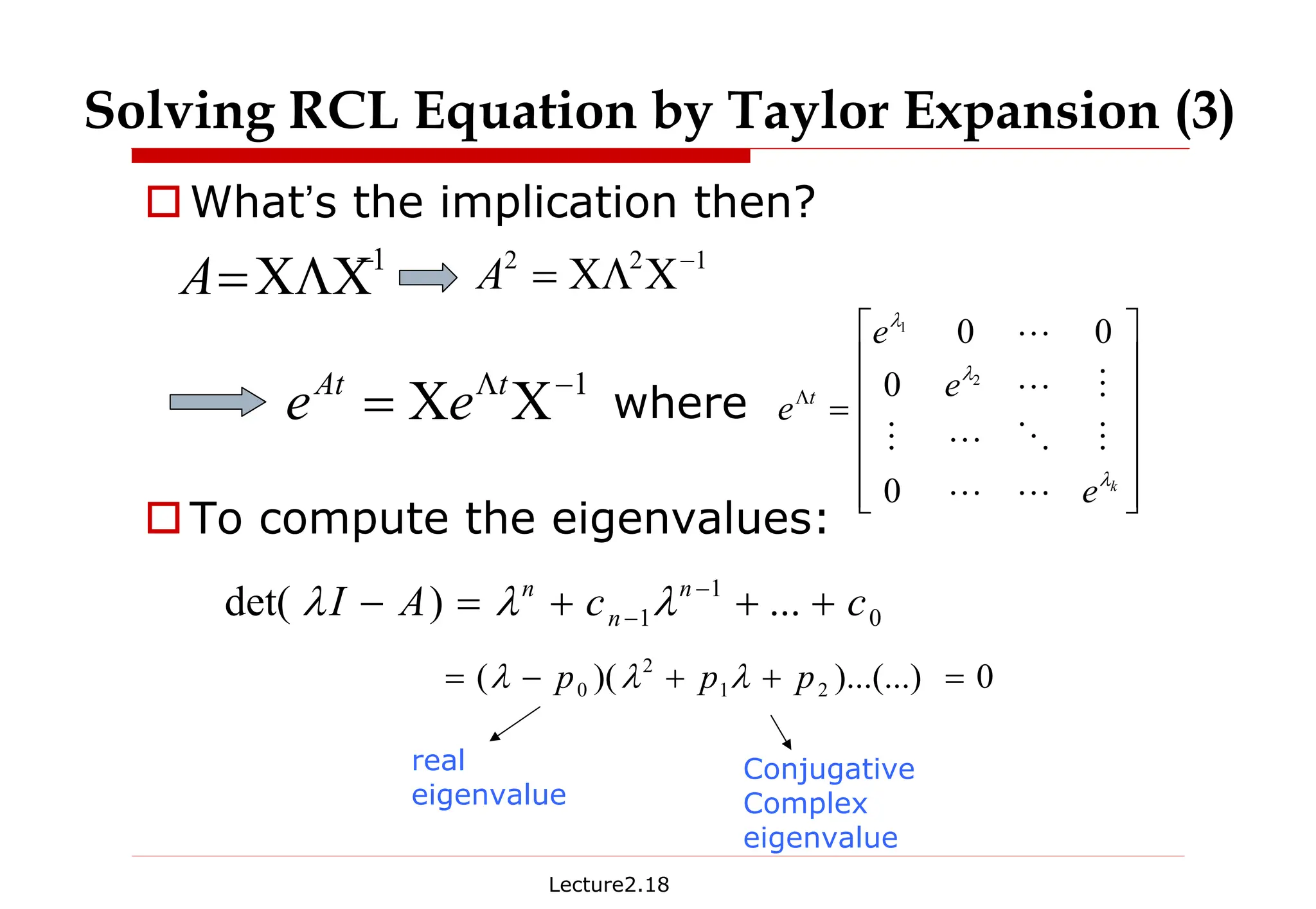
†Assume A has non-degenerate eigenvalues
and corresponding linearly
independent eigenvectors , then A
can be decomposed as
where and
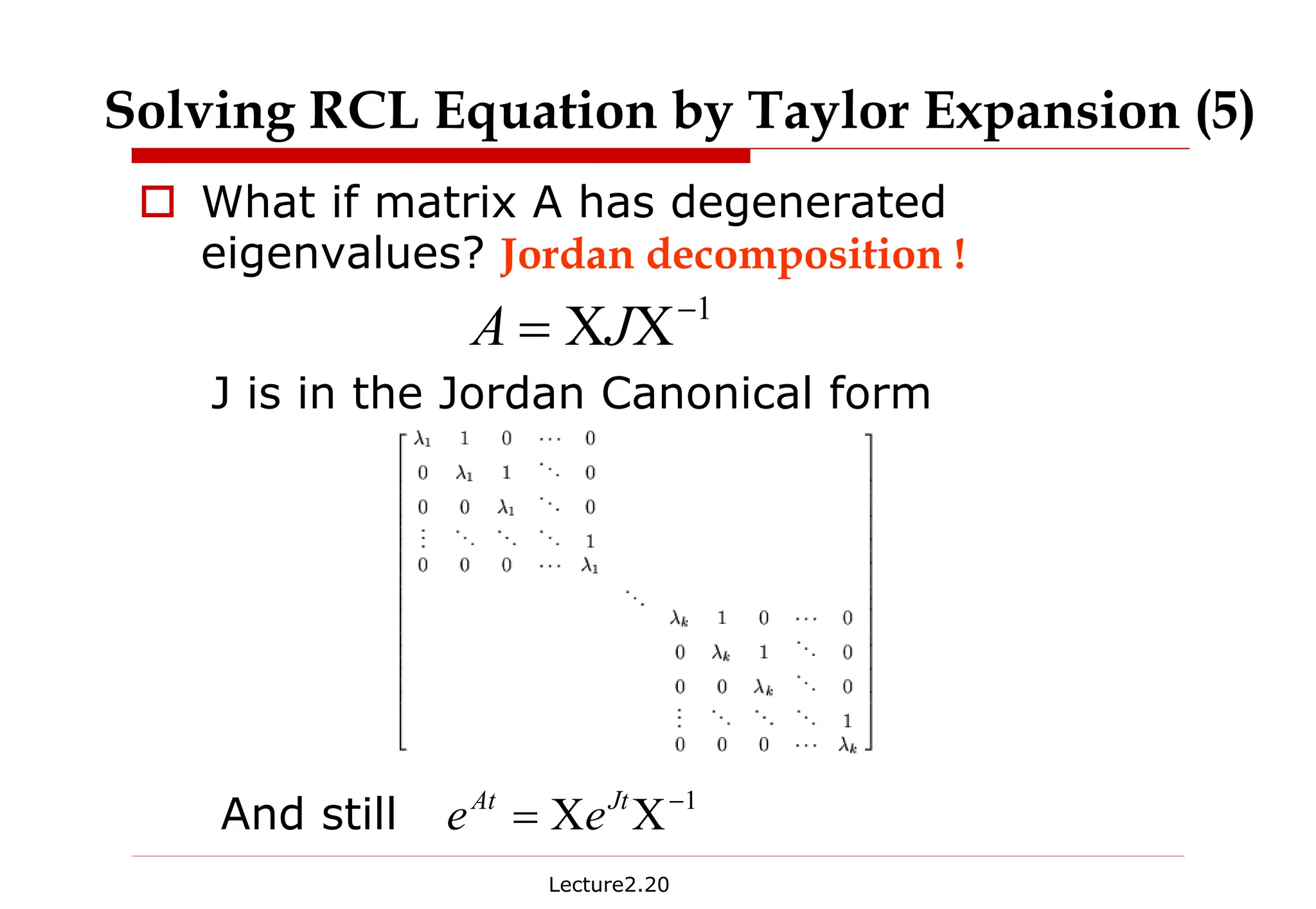
Solving RCL Equation by Taylor Expansion (2)
1
−
ΧΛΧ
=
A
k
Χ
Χ
Χ ,...,
, 2
1
k
λ
λ
λ ,...,
, 2
1
=
Λ
k
λ
λ
λ
L
L
M
O
L
M
M
L
L
0
0
0
0
2
1
[ ]
k
Χ
Χ
Χ
=
Χ ,...,
, 2
1](https://image.slidesharecdn.com/lec2-linear-240917101132-21205dc0/75/Dynamic_Linear_Systems_Lecture2-Linear-pdf-17-2048.jpg)
![Lecture2.31
Correspondence between time
domain and frequency domain
† We can derive the time domain solutions of the
network from the s domain solutions by inverse
Laplace Transformation of the s domain solutions.
State Equations
in S domain
State Equations
in time Domain
Inverse Laplace
Transform
sx(s) – x(t0)= Ax(s) +Bu(s)
y(s) = Qx(s) +Du(s)
x(t) = L-1[(sI-A)-1x(t0) + (sI-A)-1 Bu(s)]
= L-1[(sI-A)-1]x(t0) + L-1[(sI-A)-1]B*u(t)
y(t) = L-1[Q(sI-A)-1(x(t0) + Bu(s)) +Du(s)]
= Q L-1[(sI-A)-1] x(t0) + {QL-1 [(sI-A)-1]B +Dδ(t)}* u(s)](https://image.slidesharecdn.com/lec2-linear-240917101132-21205dc0/75/Dynamic_Linear_Systems_Lecture2-Linear-pdf-31-2048.jpg)
![Lecture2.32
Correspondence between time
domain and frequency domain
† (sI-A)-1 eAt
† multiplication of u(s) in s domain corresponds
to the convolution in time domain
Solution from
time domain
analysis
Solution by
inverse Laplace
transform
x(t) = L-1[(sI-A)-1x(t0) + (sI-A)-1 Bu(s)]
= L-1[(sI-A)-1]x(t0) + L-1[(sI-A)-1]B*u(t)
y(t) = L-1[Q(sI-A)-1(x(t0) + Bu(s)) +Du(s)]
= Q L-1[(sI-A)-1] x(t0) + {QL-1 [(sI-A)-1]B +Dδ(t)}* u(s)](https://image.slidesharecdn.com/lec2-linear-240917101132-21205dc0/75/Dynamic_Linear_Systems_Lecture2-Linear-pdf-32-2048.jpg)
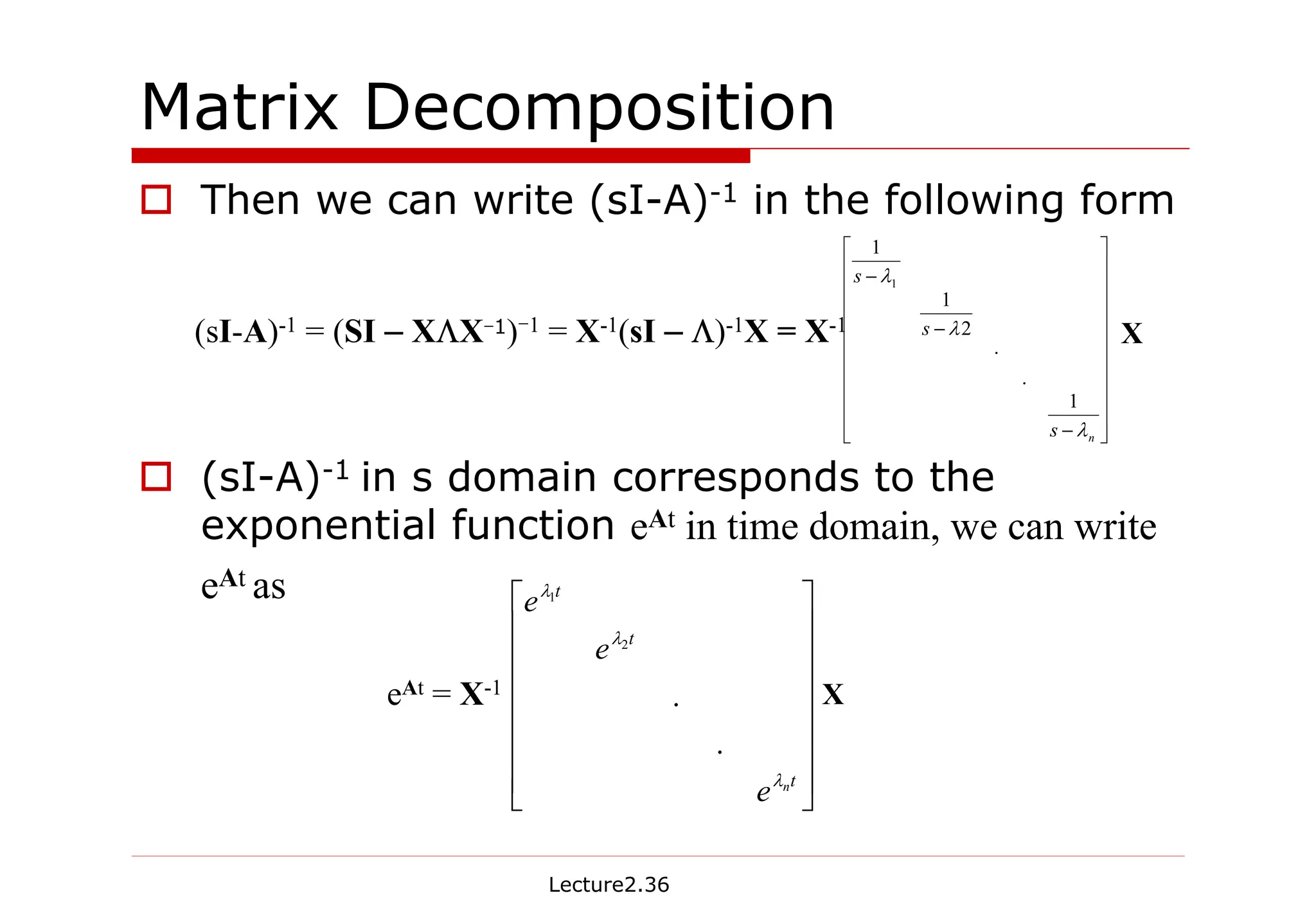
![Lecture2.35
†Assume A has non-degenerate eigenvalues
and corresponding linearly
independent eigenvectors , then A
can be decomposed as
where and
Matrix Decomposition
1
−
ΧΛΧ
=
A
k
Χ
Χ
Χ ,...,
, 2
1
k
λ
λ
λ ,...,
, 2
1
=
Λ
k
λ
λ
λ
L
L
M
O
L
M
M
L
L
0
0
0
0
2
1
[ ]
k
Χ
Χ
Χ
=
Χ ,...,
, 2
1](https://image.slidesharecdn.com/lec2-linear-240917101132-21205dc0/75/Dynamic_Linear_Systems_Lecture2-Linear-pdf-35-2048.jpg)