Flexible 1.36 inch 16*128 SPI SSD1316 Monochrome OLED Screen Module PanelShawn Lee
MPU Serial Interface (3-wire SPI)
The 3-wire serial interface consists of serial clock SCLK, serial data SDIN, and CSB.
There are altogether 9-bits that will be shifted into the shift register on every ninth clock in sequence: D/C bit, D7 to D0 bit.
The D/C bit (first bit of the sequential data) will determine the following data byte in the shift register is written to the Display Data RAM (D/C bit = 1) or the command register (D/C bit = 0).
Whatsapp: 86 18566294218
Skype: panoxshawn@outlook.com
Email: shawn.lee@panoxdisplay.com
OLED/LCD supplier: www.panoxdisplay.com
Flexible 1.36 inch 16*128 SPI SSD1316 Monochrome OLED Screen Module PanelShawn Lee
MPU Serial Interface (3-wire SPI)
The 3-wire serial interface consists of serial clock SCLK, serial data SDIN, and CSB.
There are altogether 9-bits that will be shifted into the shift register on every ninth clock in sequence: D/C bit, D7 to D0 bit.
The D/C bit (first bit of the sequential data) will determine the following data byte in the shift register is written to the Display Data RAM (D/C bit = 1) or the command register (D/C bit = 0).
Whatsapp: 86 18566294218
Skype: panoxshawn@outlook.com
Email: shawn.lee@panoxdisplay.com
OLED/LCD supplier: www.panoxdisplay.com
Lika products catalogue for wind generator industry - Japanese versionLika Electronic
Lika Electronic confirms its continued commitment to developing position measurement & control systems technologically advanced and tailored to solve even the specialised and individual requirements of increasingly fragmented and dynamic markets, offering a new range of linear and rotary encoders specifically designed for installation in safety and feedback control systems of wind turbines. This catalogue shows the wide range of rotary and linear, optical and magnetic, incremental and absolute singleturn & multiturn encoders that Lika Electronic, thanks to its solid and proven experience in wind power industry both on and offshore, has especially developed to tackle critical tasks and harsh conditions affecting each specific application in wind generators. They do not only encompass high quality, heavy-duty sturdiness, outstanding dependability and absolute safety which are the trademark of Lika Electronic, but also keep up with trends and even anticipate the high-level requirements of a sector where technological advancement is continuously and rapidly evolving.
【DLゼミ】XFeat: Accelerated Features for Lightweight Image Matchingharmonylab
公開URL:https://arxiv.org/pdf/2404.19174
出典:Guilherme Potje, Felipe Cadar, Andre Araujo, Renato Martins, Erickson R. ascimento: XFeat: Accelerated Features for Lightweight Image Matching, Proceedings of the 2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) (2023)
概要:リソース効率に優れた特徴点マッチングのための軽量なアーキテクチャ「XFeat(Accelerated Features)」を提案します。手法は、局所的な特徴点の検出、抽出、マッチングのための畳み込みニューラルネットワークの基本的な設計を再検討します。特に、リソースが限られたデバイス向けに迅速かつ堅牢なアルゴリズムが必要とされるため、解像度を可能な限り高く保ちながら、ネットワークのチャネル数を制限します。さらに、スパース下でのマッチングを選択できる設計となっており、ナビゲーションやARなどのアプリケーションに適しています。XFeatは、高速かつ同等以上の精度を実現し、一般的なラップトップのCPU上でリアルタイムで動作します。
セル生産方式におけるロボットの活用には様々な問題があるが,その一つとして 3 体以上の物体の組み立てが挙げられる.一般に,複数物体を同時に組み立てる際は,対象の部品をそれぞれロボットアームまたは治具でそれぞれ独立に保持することで組み立てを遂行すると考えられる.ただし,この方法ではロボットアームや治具を部品数と同じ数だけ必要とし,部品数が多いほどコスト面や設置スペースの関係で無駄が多くなる.この課題に対して音𣷓らは組み立て対象物に働く接触力等の解析により,治具等で固定されていない対象物が組み立て作業中に運動しにくい状態となる条件を求めた.すなわち,環境中の非把持対象物のロバスト性を考慮して,組み立て作業条件を検討している.本研究ではこの方策に基づいて,複数物体の組み立て作業を単腕マニピュレータで実行することを目的とする.このとき,対象物のロバスト性を考慮することで,仮組状態の複数物体を同時に扱う手法を提案する.作業対象としてパイプジョイントの組み立てを挙げ,簡易な道具を用いることで単腕マニピュレータで複数物体を同時に把持できることを示す.さらに,作業成功率の向上のために RGB-D カメラを用いた物体の位置検出に基づくロボット制御及び動作計画を実装する.
This paper discusses assembly operations using a single manipulator and a parallel gripper to simultaneously
grasp multiple objects and hold the group of temporarily assembled objects. Multiple robots and jigs generally operate
assembly tasks by constraining the target objects mechanically or geometrically to prevent them from moving. It is
necessary to analyze the physical interaction between the objects for such constraints to achieve the tasks with a single
gripper. In this paper, we focus on assembling pipe joints as an example and discuss constraining the motion of the
objects. Our demonstration shows that a simple tool can facilitate holding multiple objects with a single gripper.
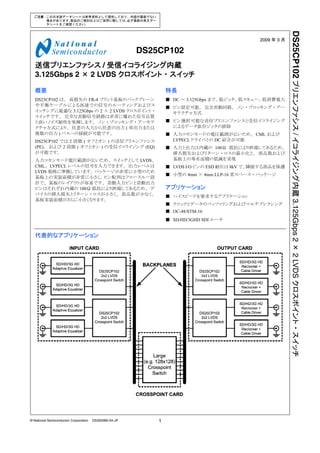
7. DS25CP102
DC テスト回路
FIGURE 1. Differential Driver DC Test Circuit
AC テスト回路およびタイミング図
FIGURE 2. Differential Driver AC Test Circuit
FIGURE 3. Propagation Delay Timing Diagram
FIGURE 4. LVDS Output Transition Times
7 www.national.com/jpn/
8. DS25CP102
プリエンファシスおよびイコライジングの試験回路
FIGURE 5. Jitter Performance Test Circuit
FIGURE 6. Pre-Emphasis Performance Test Circuit
FIGURE 7. Equalization Performance Test Circuit
www.national.com/jpn/ 8
11. DS25CP102
入力インタフェース と DC 結合できます。 次の 3 つの図は一般的な差動ドライバと
の DC 結合の代表例を示しています。 DS25CP102 の入力は、
DS25CP102 は差動入力信号を使用でき、 AC 結合または DC 100Ω の抵抗により内部で終端されていることに注意してくださ
結合が簡単です。 DS25CP102 は入力コモンモードが広範囲で い。
あり、 あらゆる一般的な差動ドライバ (LVPECL、 LVDS、 CML)
Typical LVDS Driver DC-Coupled Interface to DS25CP102 Input
Typical CML Driver DC-Coupled Interface to DS25CP102 Input
Typical LVPECL Driver DC-Coupled Interface to DS25CP102 Input
11 www.national.com/jpn/
12. DS25CP102
出力インタフェース 想定しています。 ほとんどの差動ドライバのコモンモード入力の
範囲は LVDS 規格に準拠した入力信号に対応できるようになっ
DS25CP102 は LVDS 規格に準拠した信号を出力します。 この ていますが、 推奨のインタフェースを導入する前に、 個々のレ
出力は一般的なほとんどの差動レシーバに DC 結合できます。 シーバのデータシートをチェックするようにしてください。
次の図は、 一般的な差動レシーバとの DC 結合の代表例を示
しています。 ここではレシーバの入力インピーダンスが大きいと
Typical DS25CP102 Output DC-Coupled Interface to an LVDS, CML or LVPECL Receiver
www.national.com/jpn/ 12
13. DS25CP102
代表的な性能特性
Total Jitter as a Function of Data Rate Residual Jitter as a Function of Data Rate, FR4 Stripline
Length and EQ Level
Total Jitter as a Function of Input Common Mode Supply Current as a Function of Data Rate and PE Level
Voltage
Residual Jitter as a Function of Data Rate, FR4 Stripline
Length and PE Level
13 www.national.com/jpn/
14. DS25CP102
代表的な性能特性 ( つづき )
A 3.125 Gbps NRZ PRBS-7 without PE or EQ A 3.125 Gbps NRZ PRBS-7 with PE
After 2" Differential FR-4 Stripline After 40" Differential FR-4 Stripline
H: 50 ps / DIV, V: 100 mV / DIV H: 50 ps / DIV, V: 100 mV / DIV
A 3.125 Gbps NRZ PRBS-7 without PE or EQ
After 40" Differential FR-4 Stripline
H: 50 ps / DIV, V: 100 mV / DIV
www.national.com/jpn/ 14