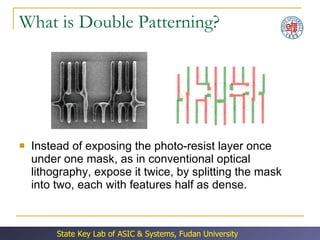
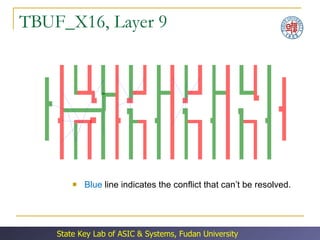
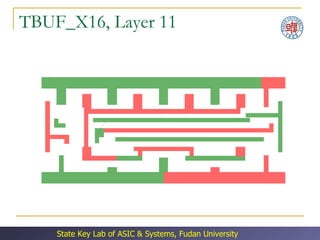
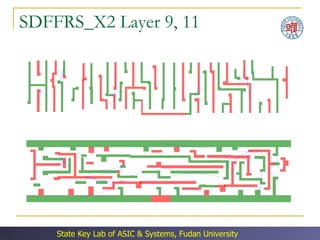
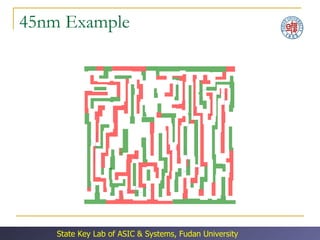
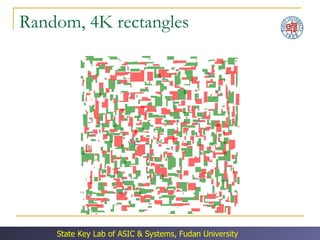
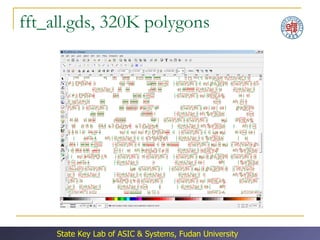
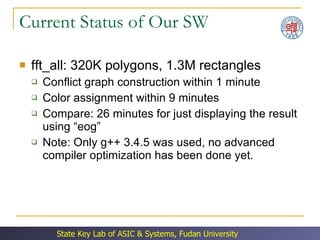
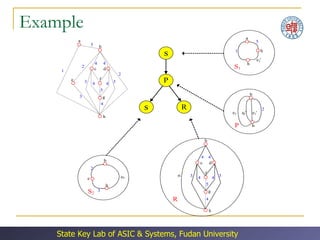
The document discusses double patterning lithography (DPL) as a technique to overcome limitations of optical lithography at smaller feature sizes. It presents an algorithm for DPL layout splitting that involves: (1) decomposing the conflict graph into tri-connected components, (2) solving each component independently, and (3) merging the solutions. Experimental results showed the algorithm achieved a 3-10x speedup over previous approaches.