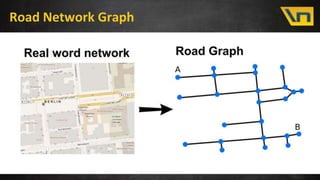
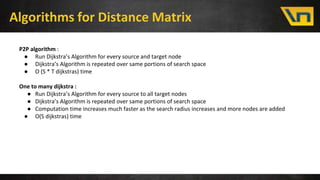
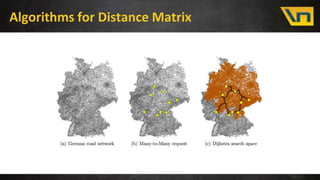
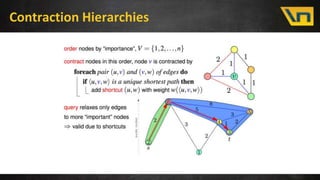
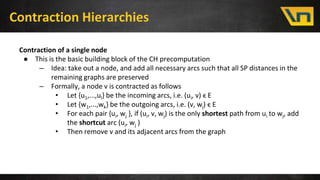
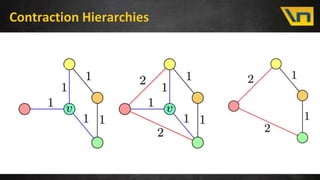
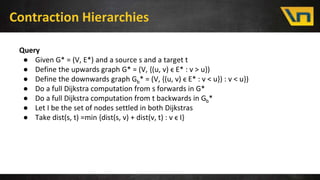
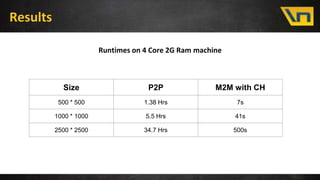
This document discusses fast distance matrix computation using contraction hierarchies. It begins with an overview and introduction to distance matrices and their uses in logistics problems. It then discusses standard graph algorithms like Dijkstra's algorithm and bidirectional Dijkstra. Challenges with naive algorithms are presented, including large search spaces. Contraction hierarchies are then introduced as a technique to preprocess the graph to reduce the search space for queries. With contraction hierarchies, the number of explored nodes is reduced dramatically, leading to much faster computation of distance matrices. Results show improvements from hours to seconds for larger problem sizes.

![1.Basic Graph algorithms
1 function Dijkstra(Graph, source):
2 dist[source] ← 0 // Initialization of MST
3
4 create vertex set Q
5
6 for each vertex v in Graph:
7 if v ≠ source
8 dist[v] ← INFINITY // Unknown distance from source to v
9 prev[v] ← UNDEFINED // Predecessor of v
10
11 Q.add_with_priority(v, dist[v])
12
13
14 while Q is not empty: // The main loop
15 u ← Q.extract_min() // Remove and return best vertex
16 for each neighbor v of u: // only v that is still in Q
17 alt = dist[u] + length(u, v)
18 if alt < dist[v]
19 dist[v] ← alt
20 prev[v] ← u
21 Q.decrease_priority(v, alt)
22
23 return dist[], prev[]
Dijkstra](https://image.slidesharecdn.com/36ebfb36-36f5-4174-9657-dc03a1504347-151215172014/85/distance_matrix_ch-6-320.jpg)
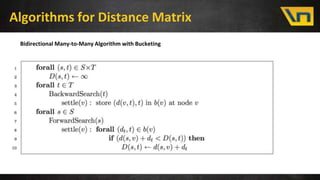
![Basic Graph algorithms
● Alternate between forward and
backward dijkstra search from s and t
respectively
● Stop when settling a node that is
already settled in the other Dijkstra
● Observe : That node settled by both
searches is not necessarily on the SP
The cost of the shortest path is then :
min {dist s[u] + dist t[u] : for all u visited
in both}
Bidirectional Dijkstra](https://image.slidesharecdn.com/36ebfb36-36f5-4174-9657-dc03a1504347-151215172014/85/distance_matrix_ch-7-320.jpg)
![Questions
?
[ e-mail : vikas.v.iitr@gmail.com ]](https://image.slidesharecdn.com/36ebfb36-36f5-4174-9657-dc03a1504347-151215172014/85/distance_matrix_ch-24-320.jpg)