Downloaded 57 times
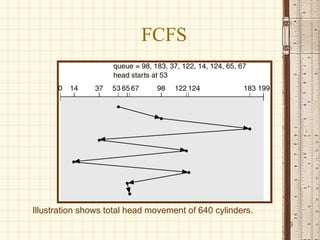
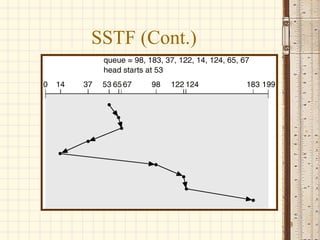
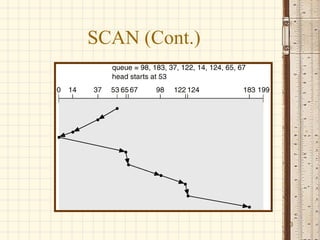
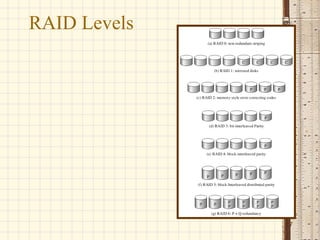
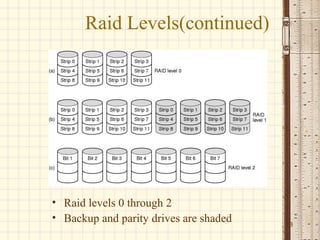
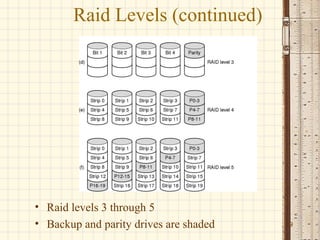
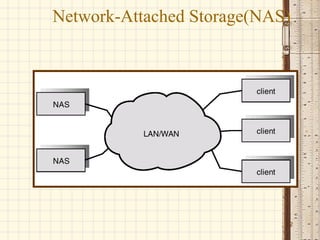
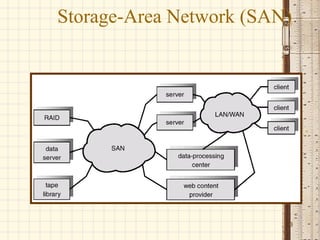

Disk scheduling algorithms like FCFS, SSTF, SCAN, C-SCAN, and C-LOOK are used to optimize disk access time and bandwidth. The algorithms aim to minimize seek time by ordering requests to reduce head movement across cylinders. RAID uses data redundancy across multiple disks to improve reliability and performance. Disks can be attached directly via I/O ports or networked via NAS and SAN for remote access to storage.