Download to read offline



![8
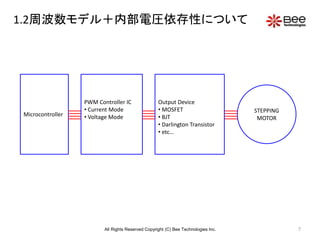
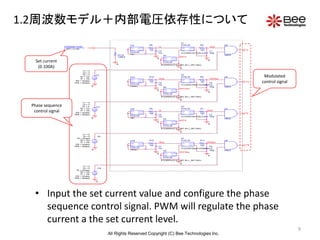
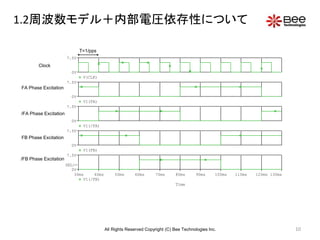
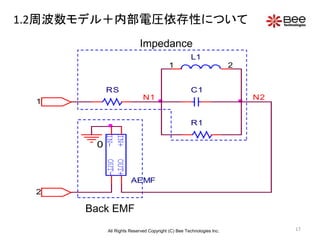
1.2周波数モデル+内部電圧依存性について
Dbreak
D1
+
-
+
-
S1
S
RON = 10E-3
+
-
+
-
S2
S
RON = 10E-3
+
-
+
-
S3
S
RON = 10E-3
+
-
+
-
S4
S
RON = 10E-3
Dbreak
D2
VCC
0 /A
0
0
0
VCC
B
A
VCCVCC VCC
Vcc
24
0
/B
A
CLK
TD = 0
TF = 10n
PW = {0.49/pps}
PER = {1/pps}
V1 = 0
TR = 10n
V2 = 5
0
PARAMETERS:
pps = 600
CLK
Abar
Dbreak
D3
VCC
Dbreak
D4
VCC
Bbar
B
FA
I
/FA
FB
/FB
Stepping Motor Driver
Acom
/A
B
Bcom
A
/B
U6
4H4018X0101
PPS = {pps}
• The clock signal and the motor model are synchronized.
Input the value in the “PARAMETERS: pps= ” to set the
speed condition.
Input Speed
[pps] here.
Clock signal
(600pps)
Unipolar stepping motor
(driven with 600pps)
IDEAL MOSFT
All Rights Reserved Copyright (C) Bee Technologies Inc.](https://image.slidesharecdn.com/devicemodelingsteppingmotor15apr2020-200415095428/85/Device-Modeling-of-Stepping-Motor-using-SPICE-8-320.jpg)
![12
1.2周波数モデル+内部電圧依存性について
Time
0s 2.0ms
I(S1:3)
0A
150mA
SEL>>
(172.935u,100.000m)
V(FA)
0V
7.5V
V(CLK)
0V
7.5V
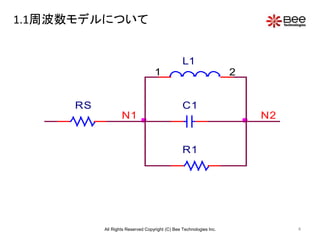
Current Rise Time vs. Speed Simulation
Clock Rate = 600pps
Phase A current rise time is 172.935usec.
At 600[pps] clock rate.
Phase A
Phase A Current
(ID of MOSFET)
Clock
tr=172.935
600[pps]
All Rights Reserved Copyright (C) Bee Technologies Inc.](https://image.slidesharecdn.com/devicemodelingsteppingmotor15apr2020-200415095428/85/Device-Modeling-of-Stepping-Motor-using-SPICE-12-320.jpg)
![13
1.2周波数モデル+内部電圧依存性について
Time
0s 2.0ms
I(S1:3)
0A
150mA
SEL>>
(173.619u,100.000m)
V(FA)
0V
7.5V
V(CLK)
0V
7.5V
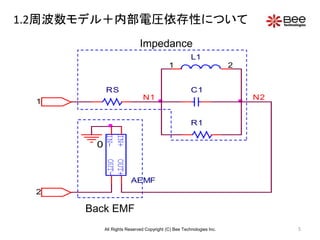
Current Rise Time vs. Speed Simulation
Clock Rate = 750pps
Phase A current rise time is 173.619usec. At
750[pps] clock rate.
Phase A
Phase A Current
(ID of MOSFET)
Clock
750[pps]
tr=173.619
All Rights Reserved Copyright (C) Bee Technologies Inc.](https://image.slidesharecdn.com/devicemodelingsteppingmotor15apr2020-200415095428/85/Device-Modeling-of-Stepping-Motor-using-SPICE-13-320.jpg)
![14
1.2周波数モデル+内部電圧依存性について
Time
0s 2.0ms
I(S1:3)
0A
150mA
SEL>>
(174.773u,100.000m)
V(FA)
0V
7.5V
V(CLK)
0V
7.5V
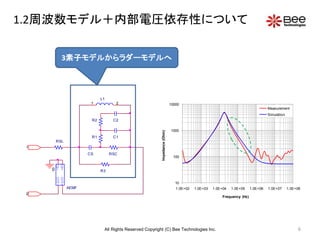
Current Rise Time vs. Speed Simulation
Clock Rate = 1000pps
Phase A current rise time is 174.773usec. At
1000[pps] clock rate.
Phase A
Phase A Current
(ID of MOSFET)
Clock
1000[pps]
tr=174.773
All Rights Reserved Copyright (C) Bee Technologies Inc.](https://image.slidesharecdn.com/devicemodelingsteppingmotor15apr2020-200415095428/85/Device-Modeling-of-Stepping-Motor-using-SPICE-14-320.jpg)
![15
1.2周波数モデル+内部電圧依存性について
Speed
Rise time
Simulation
[pps] [usec]
600 172.935
750 173.619
1000 174.773
The measurement and simulation result of
phase current rise time.
All Rights Reserved Copyright (C) Bee Technologies Inc.](https://image.slidesharecdn.com/devicemodelingsteppingmotor15apr2020-200415095428/85/Device-Modeling-of-Stepping-Motor-using-SPICE-15-320.jpg)
![16
1.2周波数モデル+内部電圧依存性について
Speed
Rise time
Simulation
[pps] [usec]
600 172.935
750 173.619
1000 174.773
E_AEMF VALUE
?
?
?
Speed (pps)
Back
EMF
Voltage
(v)
関数を作成する
All Rights Reserved Copyright (C) Bee Technologies Inc.](https://image.slidesharecdn.com/devicemodelingsteppingmotor15apr2020-200415095428/85/Device-Modeling-of-Stepping-Motor-using-SPICE-16-320.jpg)

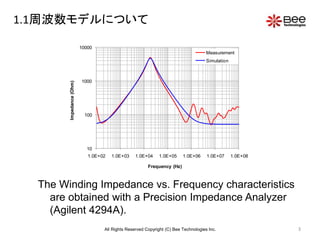
This document discusses stepping motor device modeling. It describes frequency models including 3-element, 5-element, and ladder models. It also discusses adding internal voltage dependency to frequency models. Graphs and circuit diagrams are provided to show impedance characteristics and example motor drive circuits. Simulation results examine effects of clock speed on current rise time and develop a function to model back EMF voltage based on motor speed. The goal is to accurately model stepping motor behavior for integration into system simulations.









































































