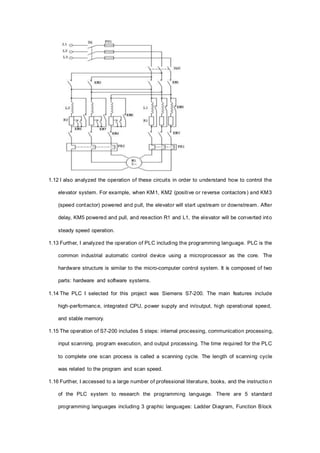
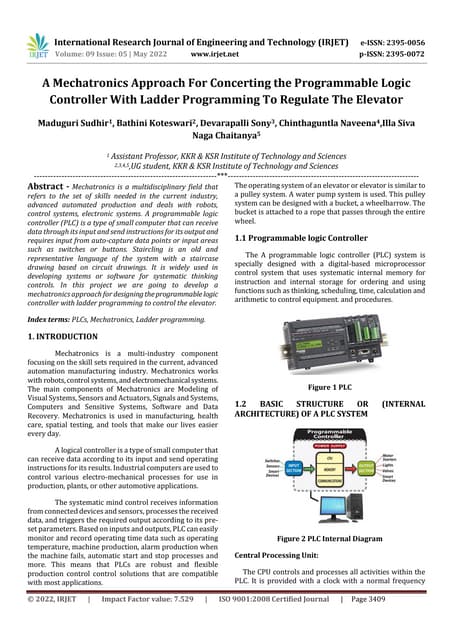
This document summarizes a student project to design a five-story elevator control system using a programmable logic controller (PLC). The student analyzed the elevator hardware components and PLC operation. They programmed the PLC using ladder logic to control elevator functions like door opening, direction selection, and call instructions. The student tested the program through simulation and on a physical elevator model. It operated properly and the project received a high grade.