Download as PDF, PPTX



![Enabling GPU access with Compose
Build on Open Source
● Compose services can define GPU device reservations
services:
test:
image: nvidia/cuda:10.2-base
command: nvidia-smi
deploy:
resources:
reservations:
devices:
- driver: nvidia
count: 1
capabilities: [gpu, utility]
ia-smi
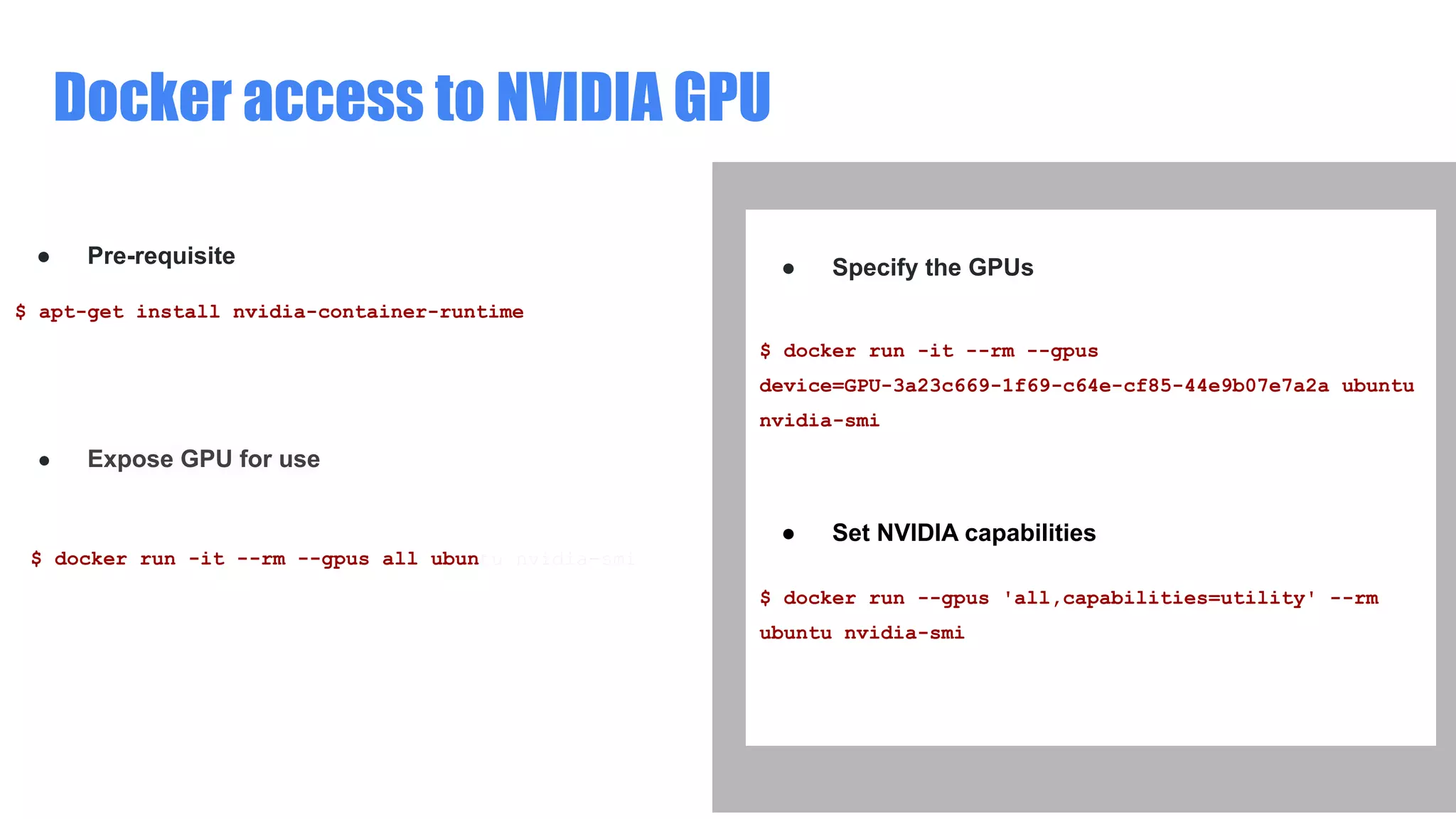
● Specify the GPUs
$ docker-compose up
Creating network "gpu_default" with the default driver
Creating gpu_test_1 ... done
Attaching to gpu_test_1
test_1 |
+-----------------------------------------------------
------------------------+
test_1 | | NVIDIA-SMI 450.80.02 Driver Version:
450.80.02 CUDA Version: 11.1 |
test_1 |
|-------------------------------+---------------------
-+----------------------+
======================================================
==============|](https://image.slidesharecdn.com/deliveringcontainers-basedappstoiotedgedevices-210528062427/75/Delivering-Container-based-Apps-to-IoT-Edge-devices-13-2048.jpg)


![Running Mask detection system
Build on Open Source
● Open the daemon.json ( /etc/docker/daemon.json)
{
"runtimes": {
"nvidia": {
"path": "/usr/bin/nvidia-container-runtime",
"runtimeArgs": []
}
}
}
● Restart docker
$ systemctl restart docker
You also need to install nvidia-container-runtime
$ sudo apt install nvidia-container-runtime
$ sudo docker pull maskcam/maskcam-beta
$ sudo docker run --runtime nvidia --privileged --rm
-it --env MASKCAM_DEVICE_ADDRESS=<your-jetson-ip> -p
1883:1883 -p 8080:8080 -p 8554:8554
maskcam/maskcam-beta](https://image.slidesharecdn.com/deliveringcontainers-basedappstoiotedgedevices-210528062427/75/Delivering-Container-based-Apps-to-IoT-Edge-devices-29-2048.jpg)
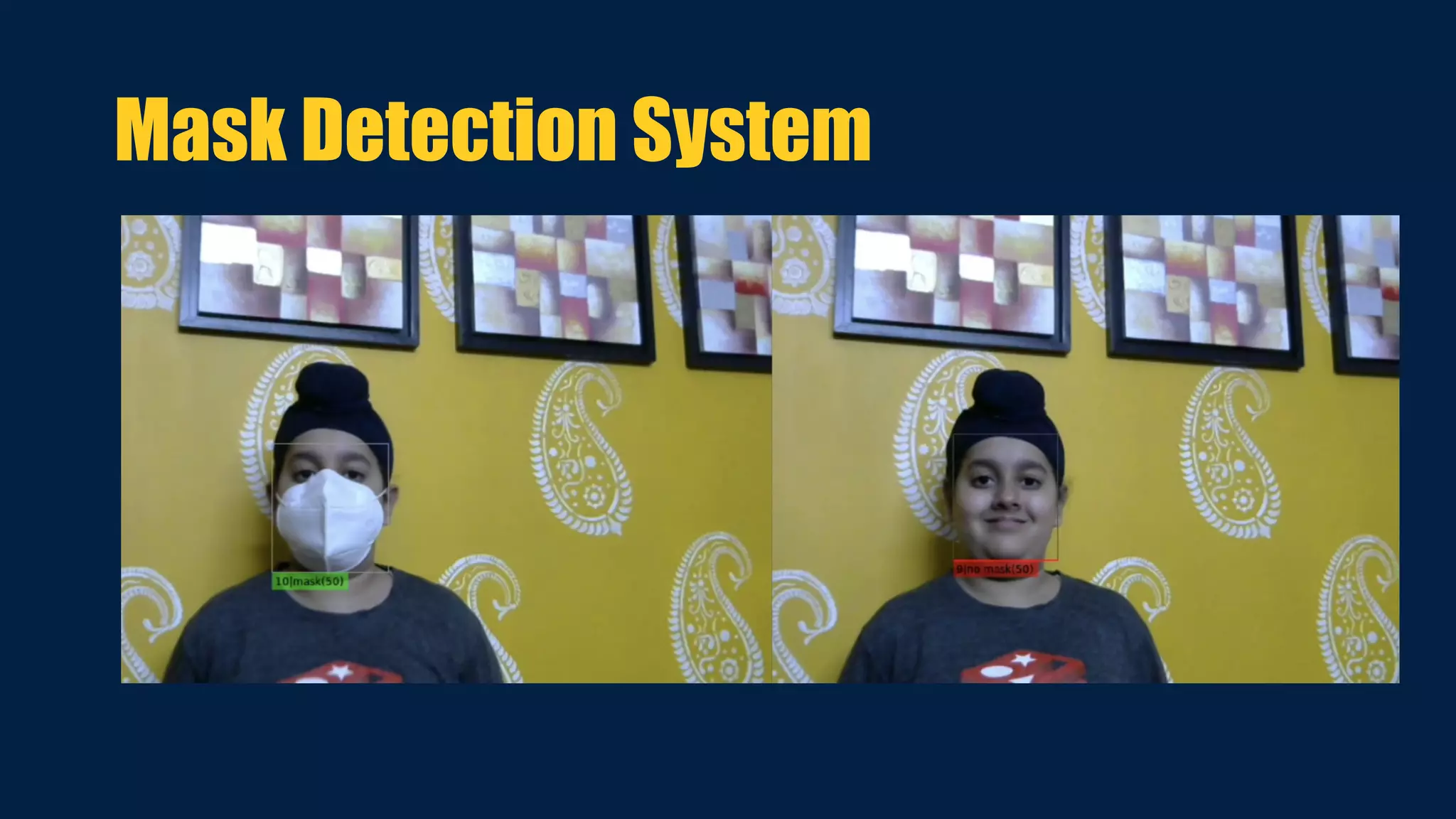



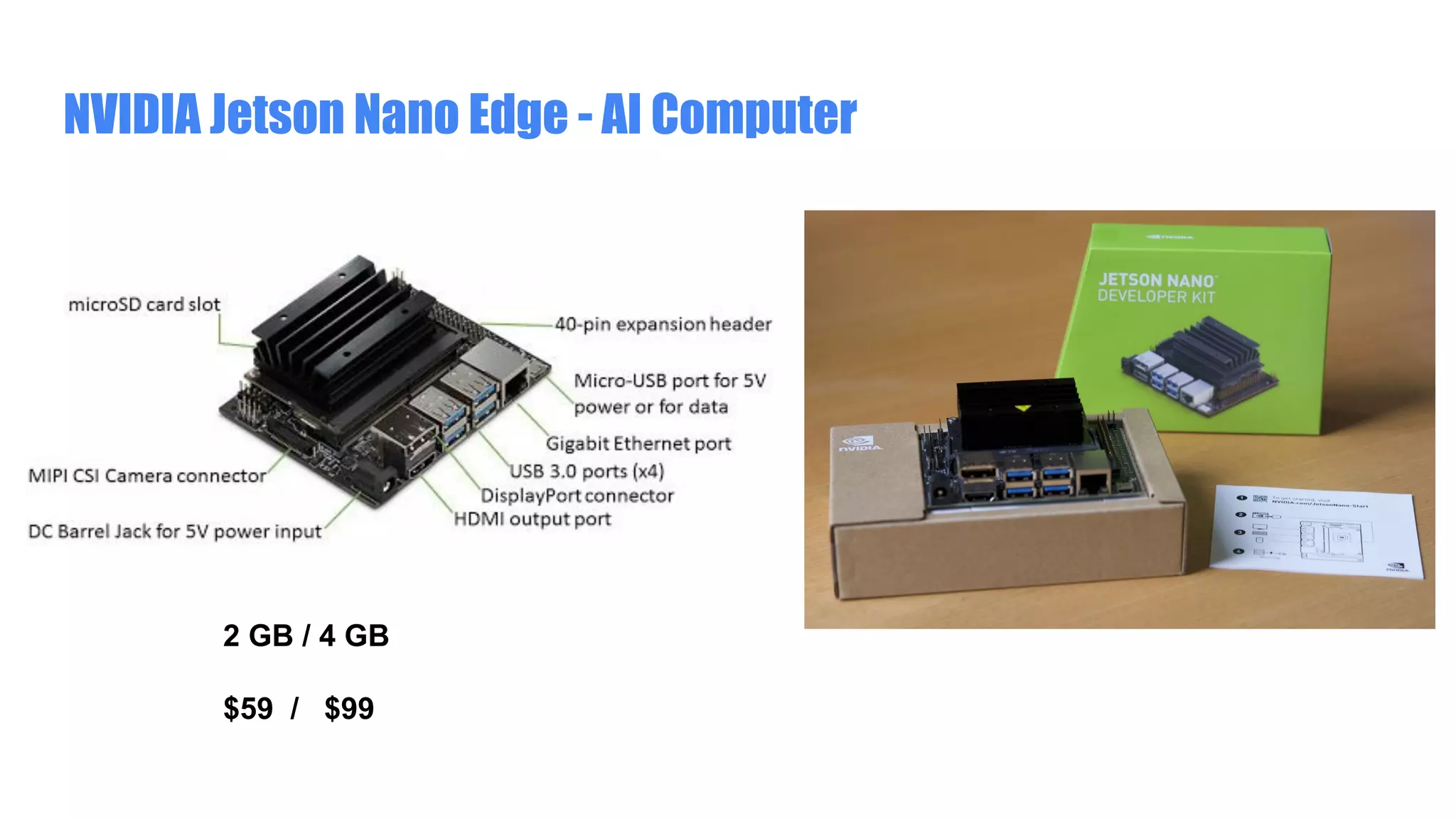
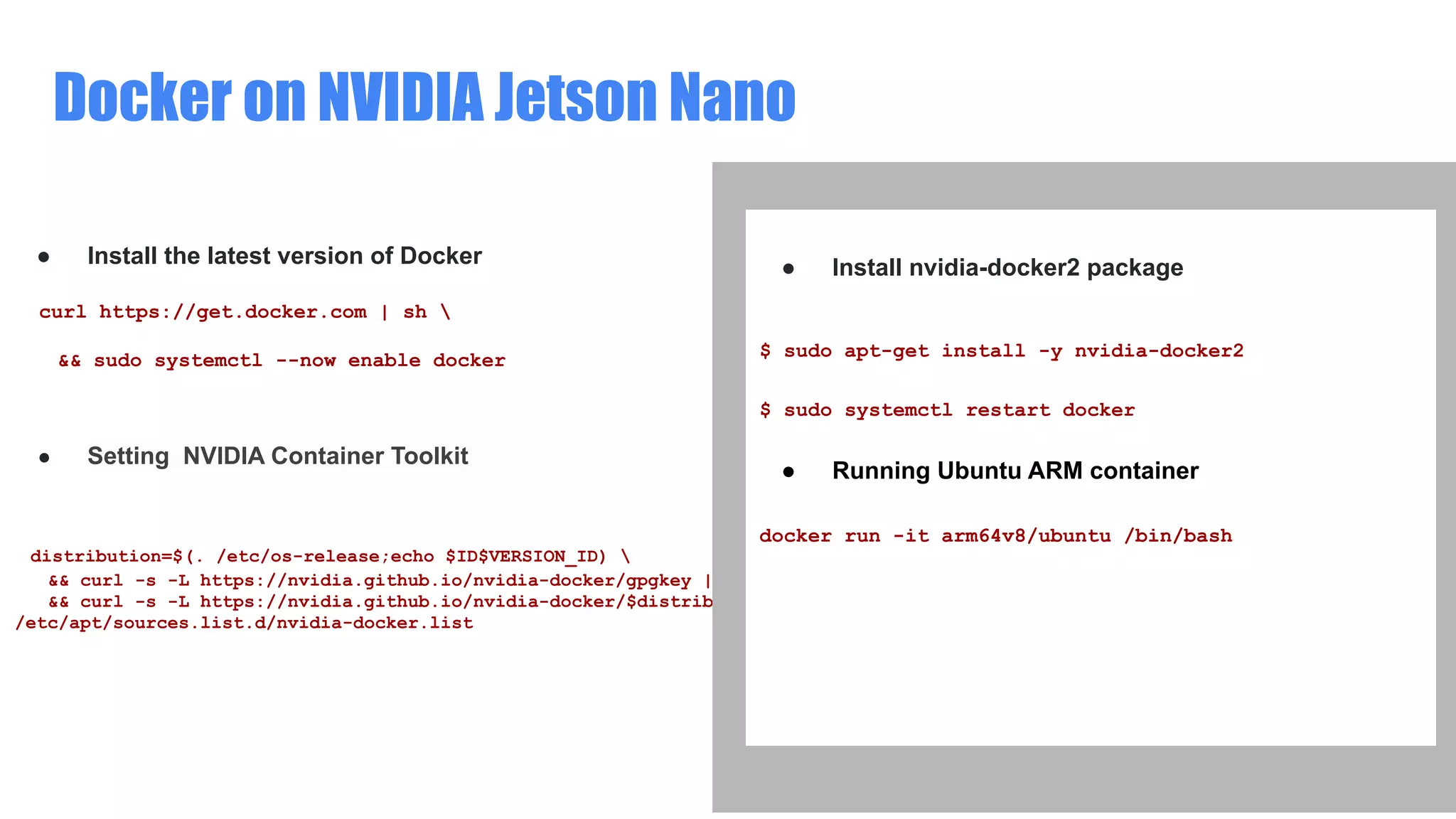
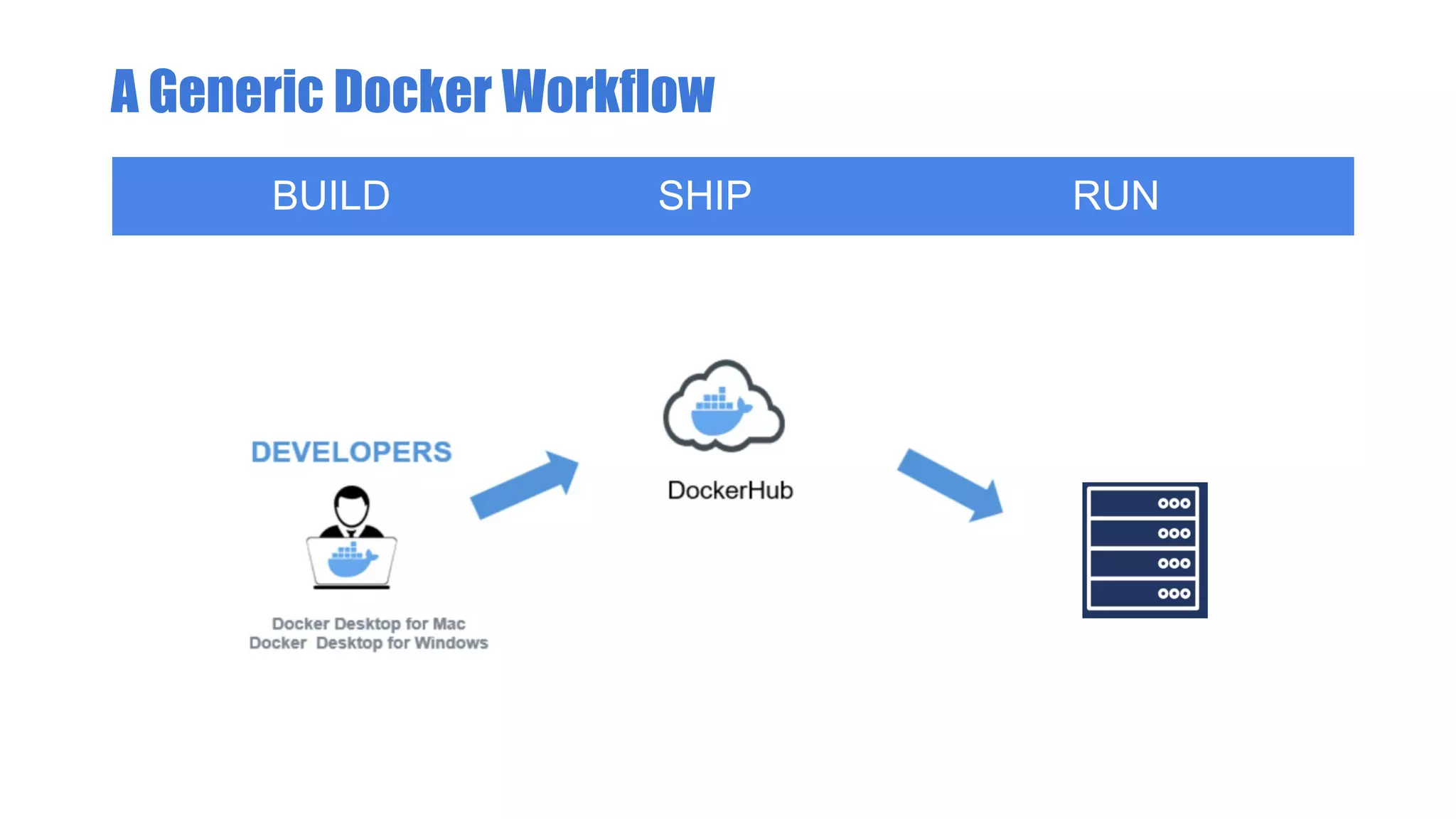
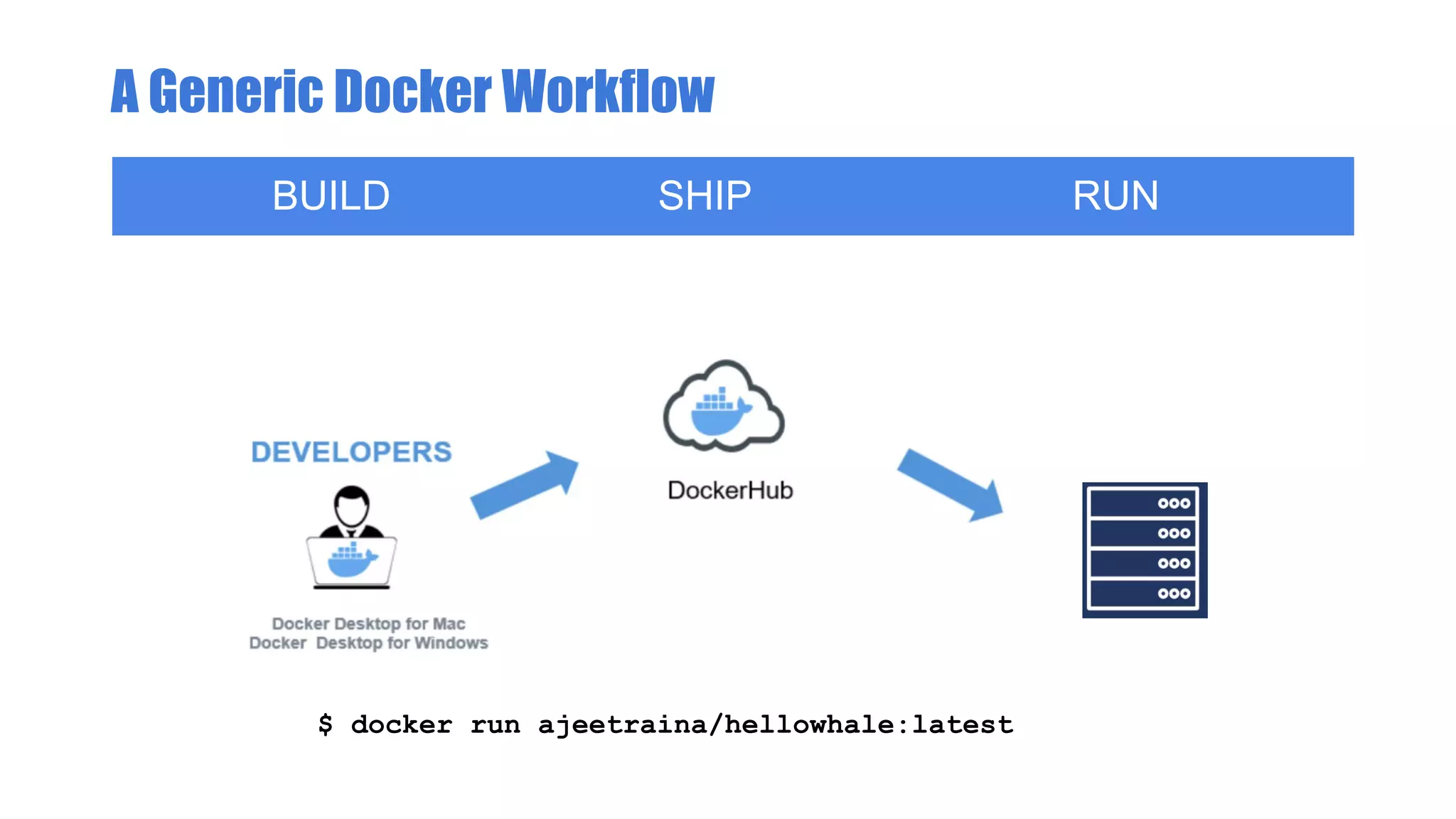
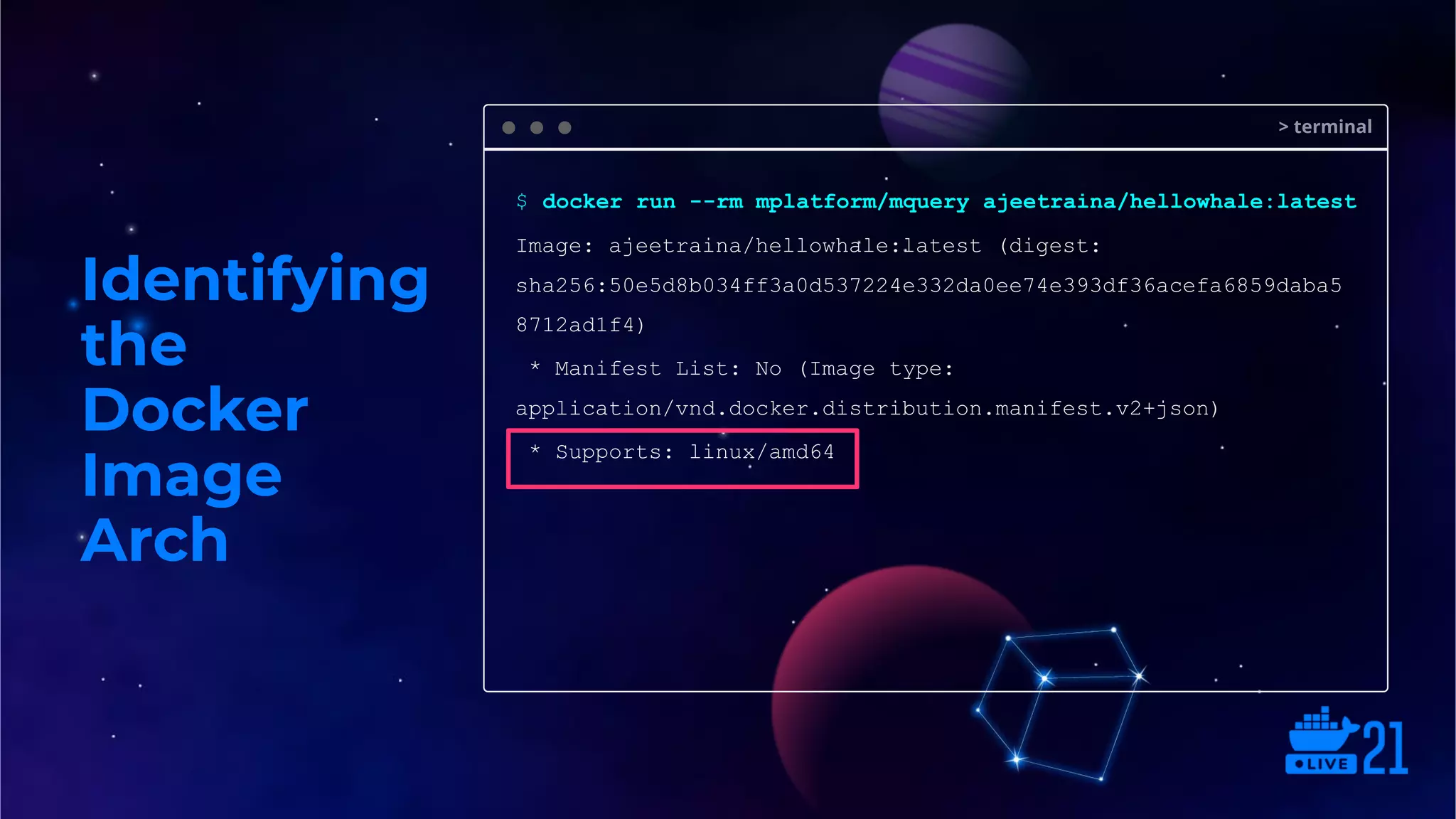
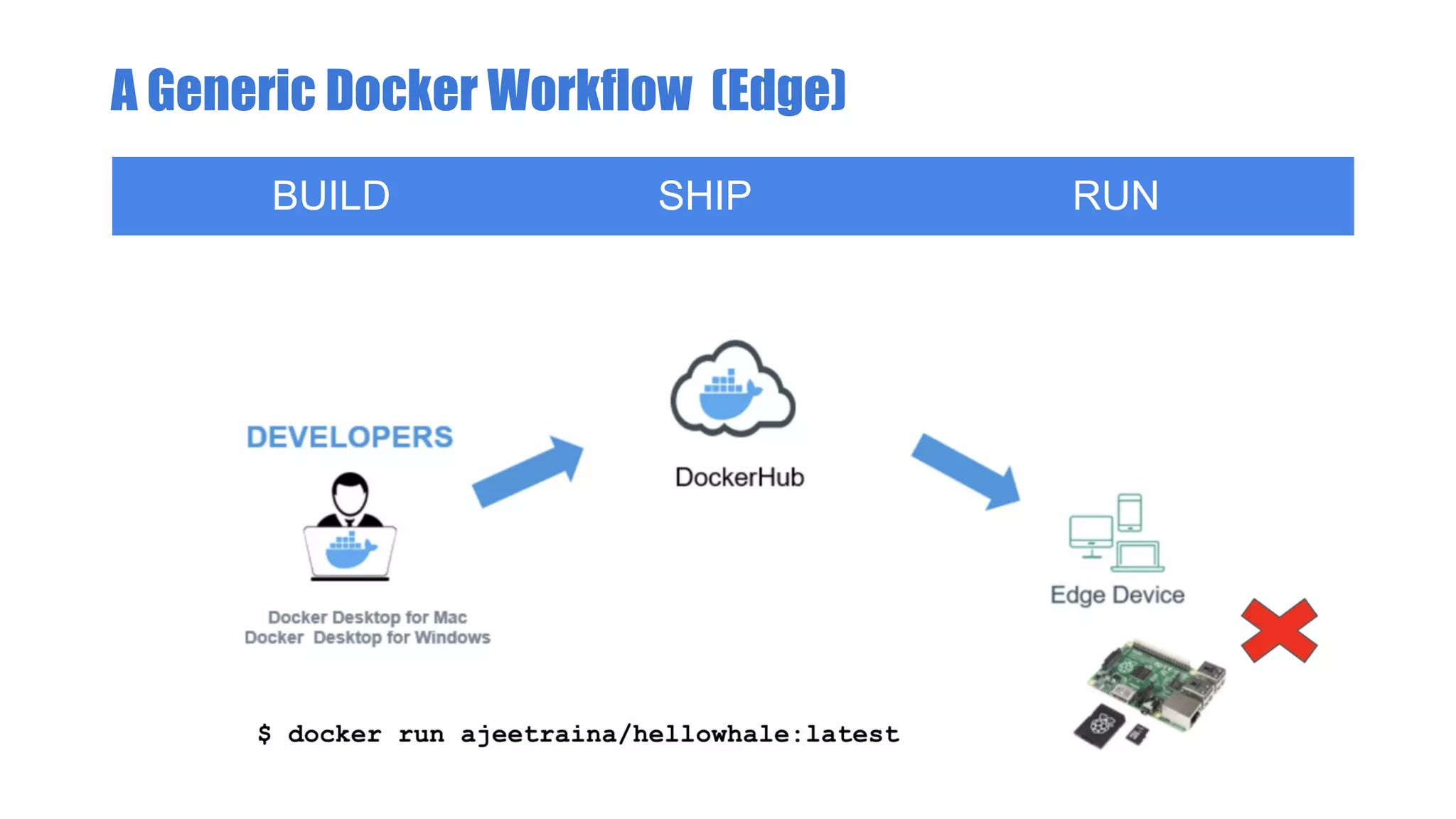
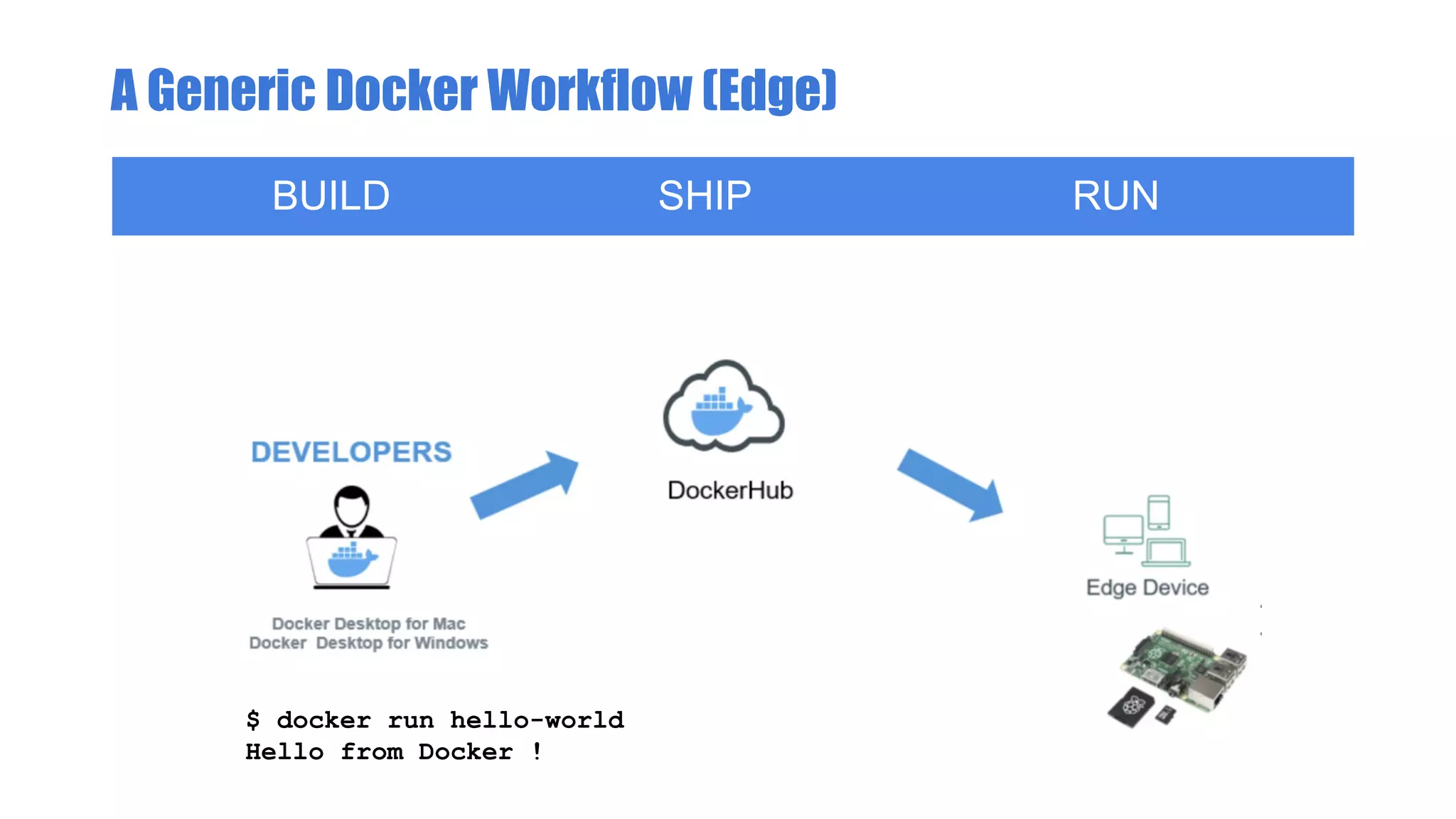
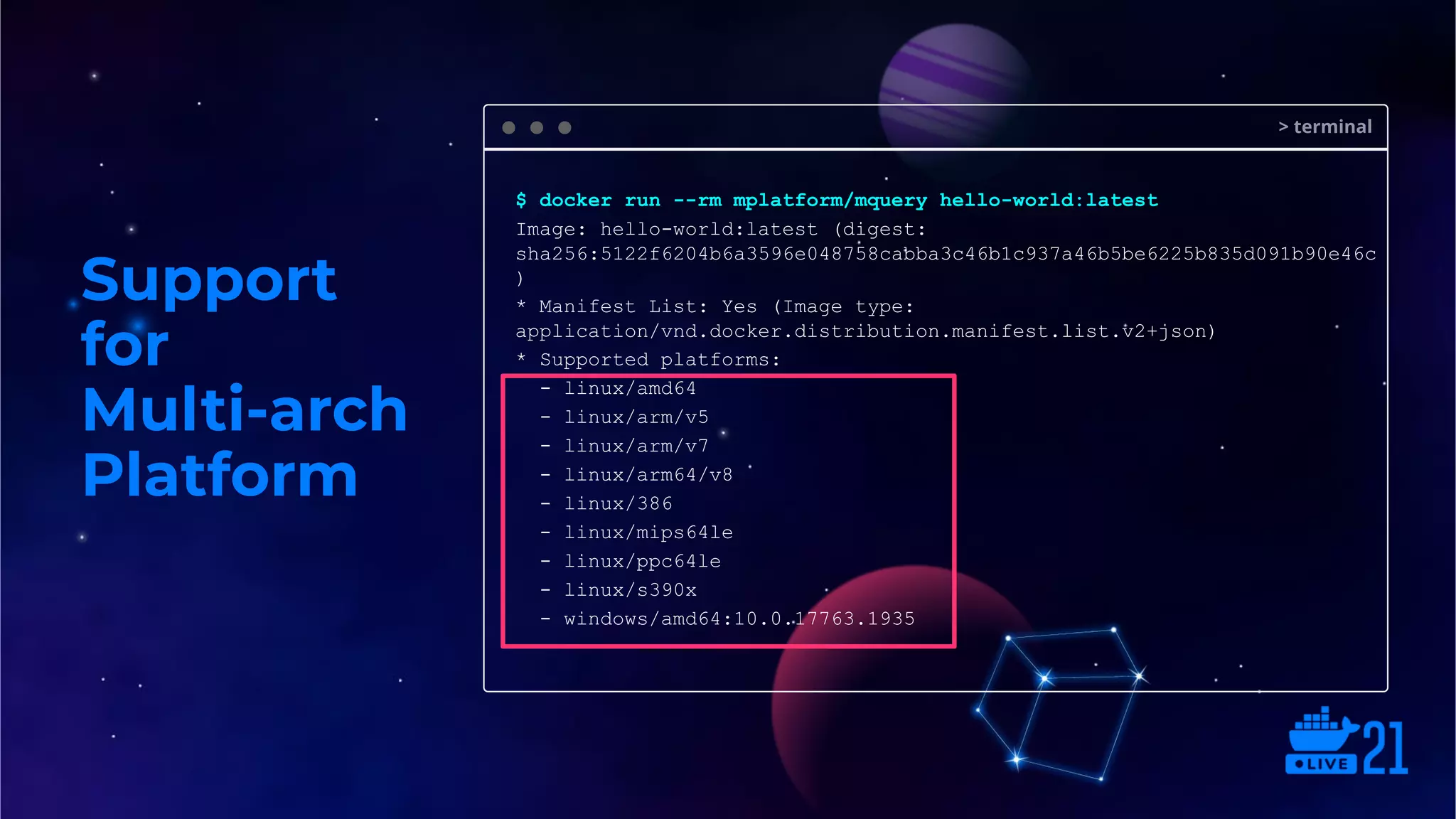
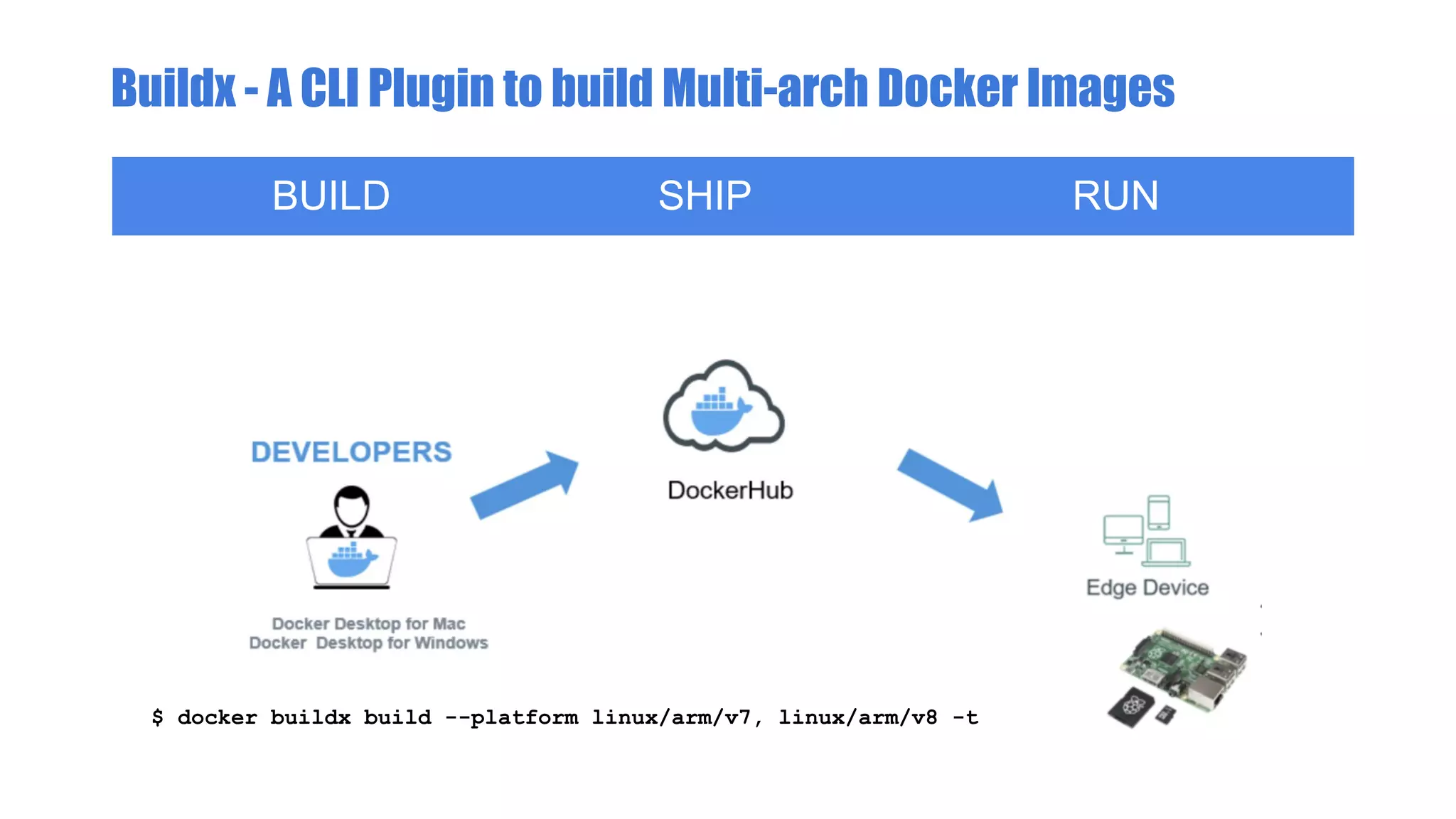
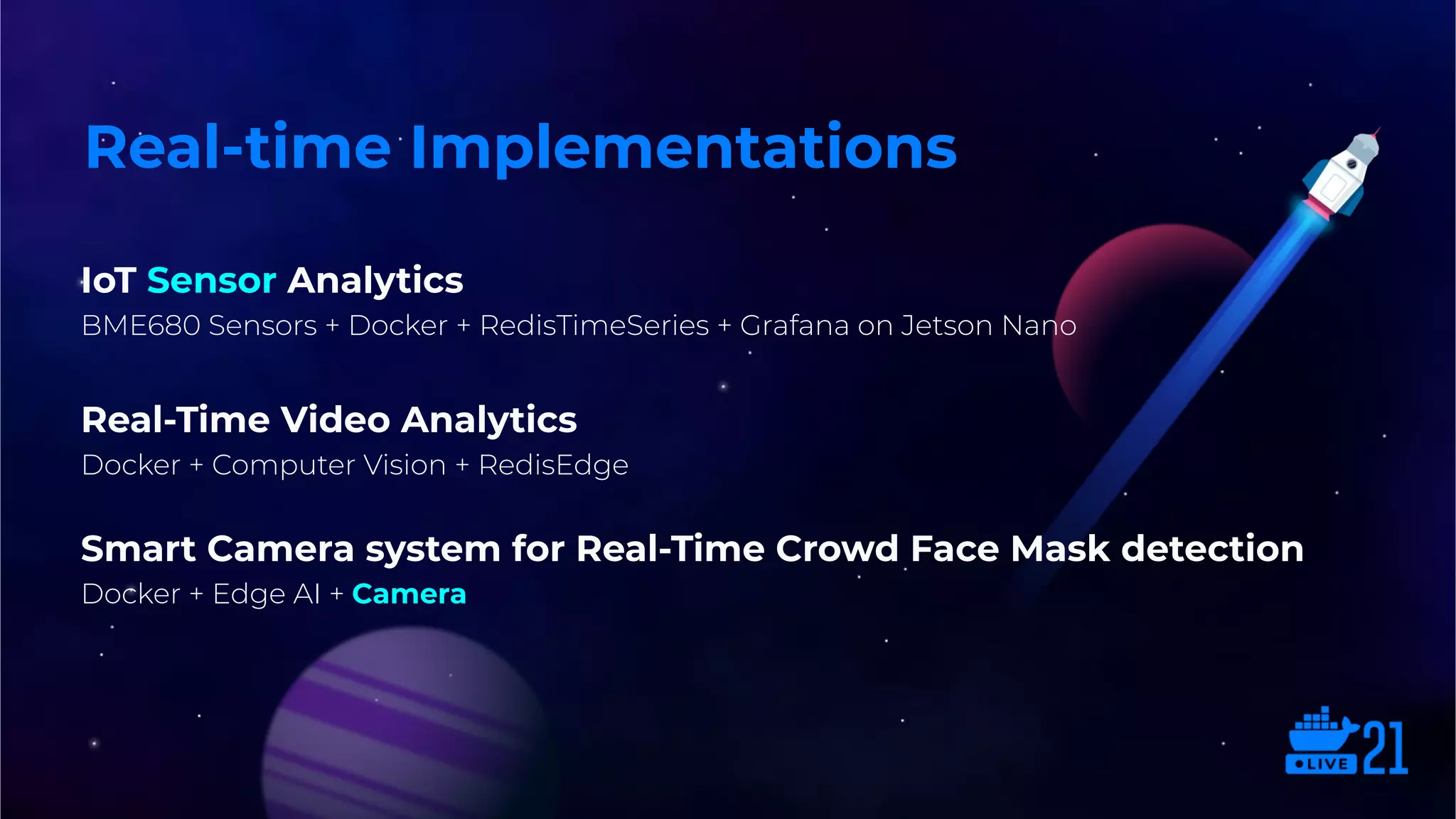
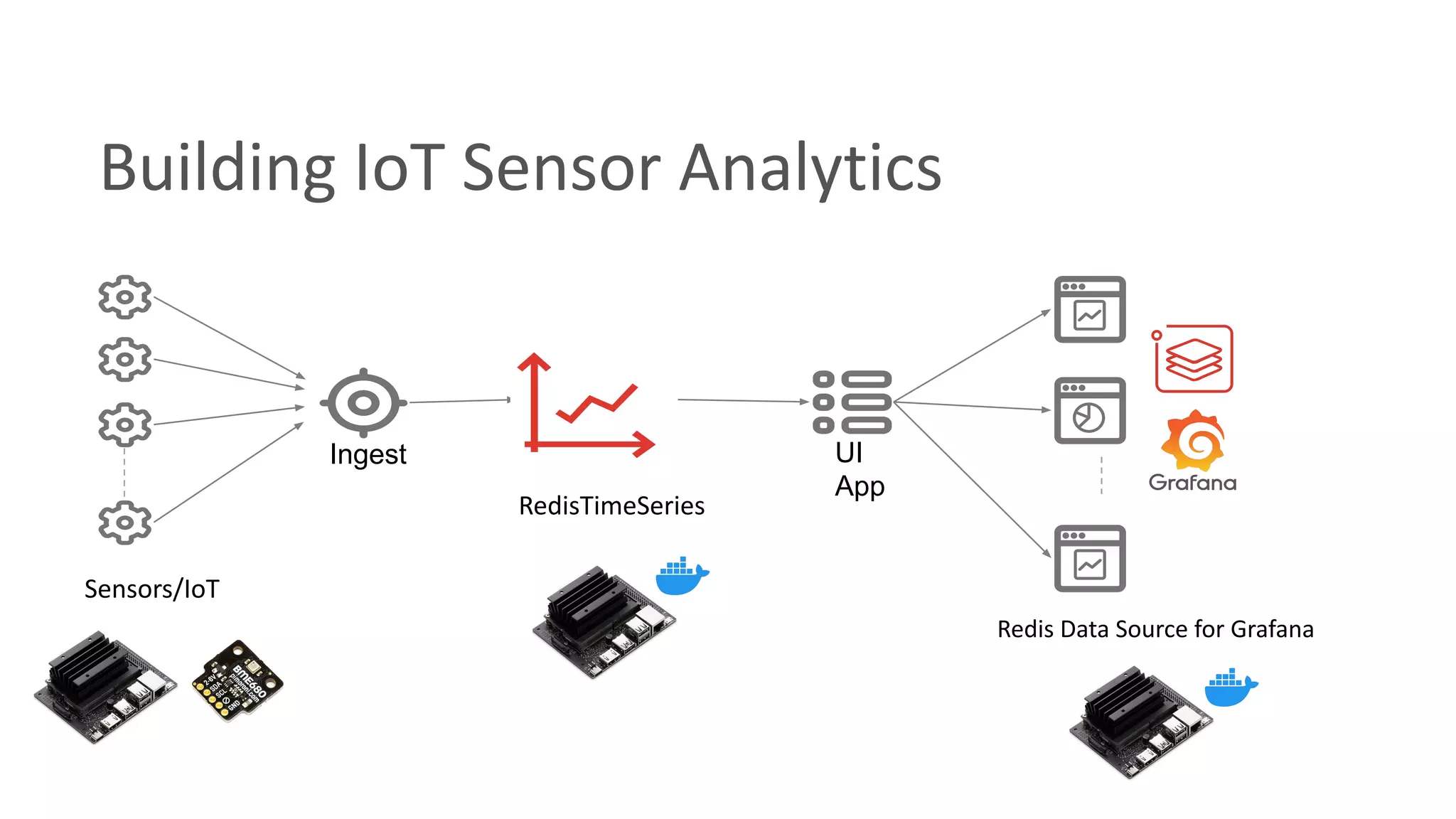
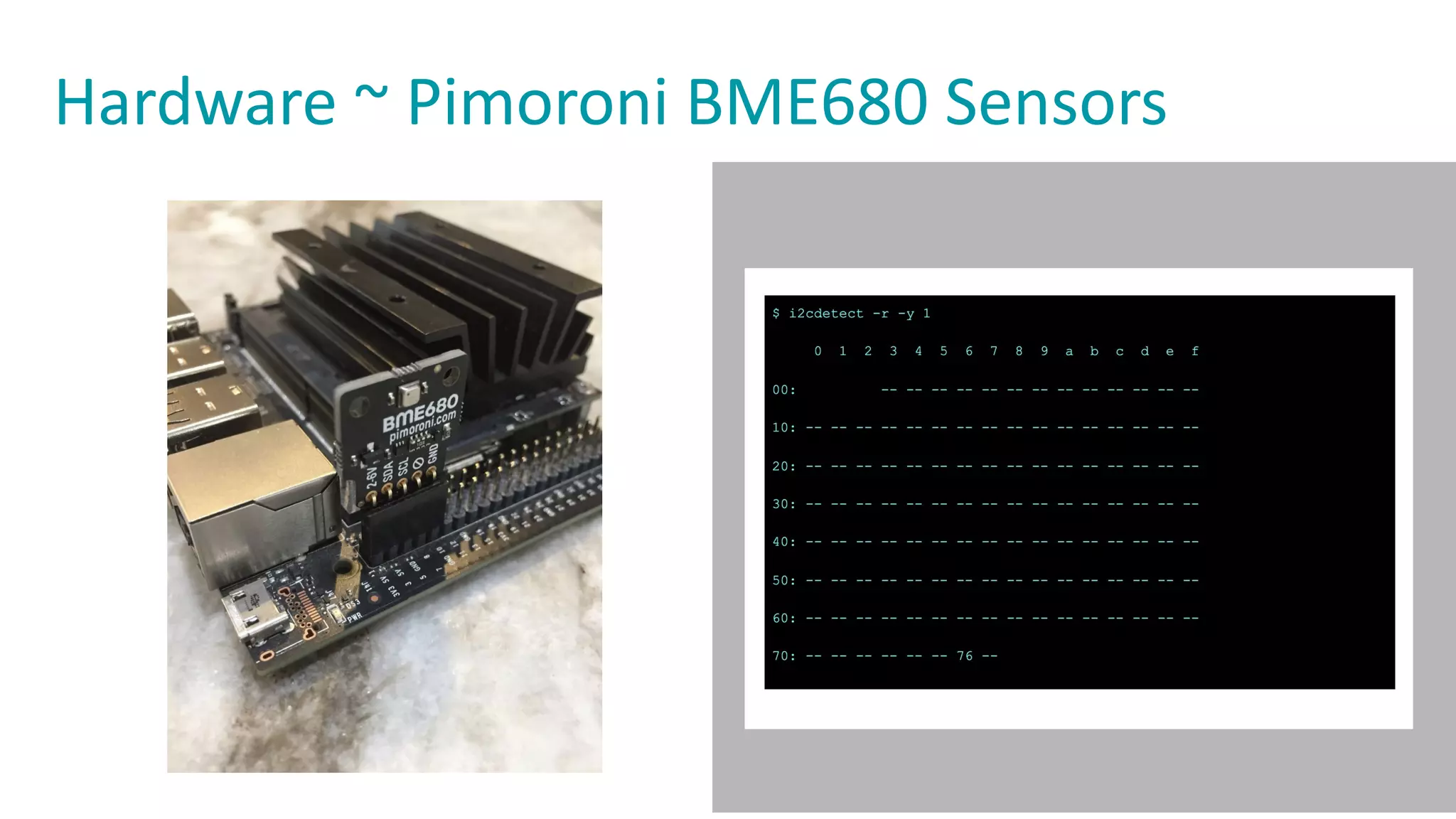
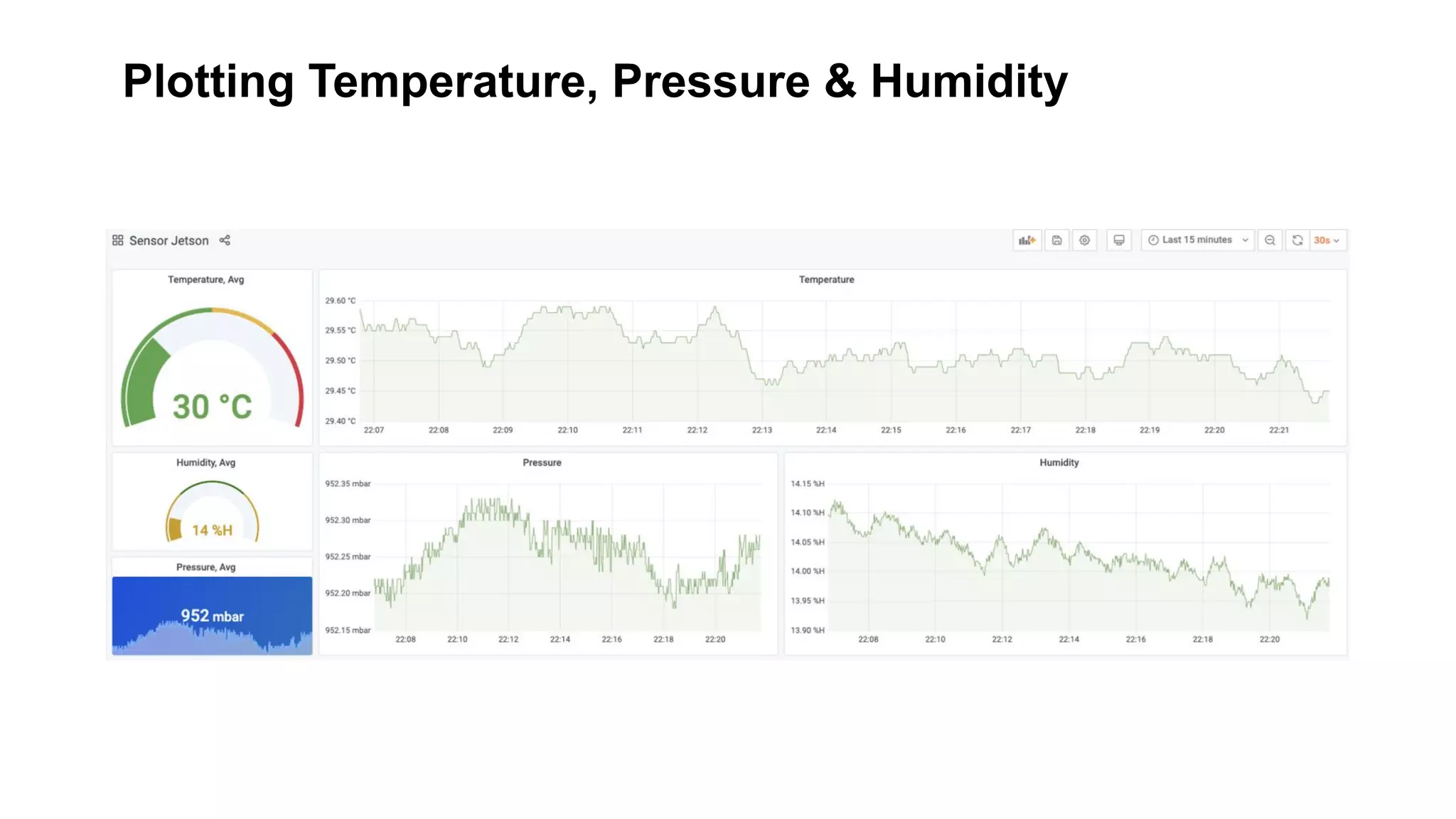
Ajeet Singh Raina discusses building container-based applications for IoT edge devices using Docker, particularly on NVIDIA Jetson platforms. The document covers the setup of Docker and NVIDIA container toolkit, the process of enabling GPU access, and provides examples of deploying applications for real-time sensor analytics and crowd mask detection. It emphasizes the importance of using containers for AI adoption, highlighting a generic workflow for building and running Docker images across multiple architectures.



![[OpenStack Day in Korea 2015] Track 1-6 - 갈라파고스의 이구아나, 인프라에 오픈소스를 올리다. 그래서 보이...](https://cdn.slidesharecdn.com/ss_thumbnails/16-150213044916-conversion-gate02-thumbnail.jpg?width=640&height=640&fit=bounds)



![[OpenStack Day in Korea 2015] Track 1-4 - VDI OpenStack? It Works!!!](https://cdn.slidesharecdn.com/ss_thumbnails/14-150213044503-conversion-gate02-thumbnail.jpg?width=640&height=640&fit=bounds)










![[OpenStack Days Korea 2016] Track1 - All flash CEPH 구성 및 최적화](https://cdn.slidesharecdn.com/ss_thumbnails/12skt-160226171513-thumbnail.jpg?width=640&height=640&fit=bounds)


![[Open infra] how to calculate the cloud system operating rate](https://cdn.slidesharecdn.com/ss_thumbnails/openinfrahowtocalculatethecloudsystemoperatingrate-210911051805-thumbnail.jpg?width=640&height=640&fit=bounds)
![[OpenStack 하반기 스터디] DPDK & OpenStack why?](https://cdn.slidesharecdn.com/ss_thumbnails/openstackteam3openstack-study-team3ver2description-151221120401-thumbnail.jpg?width=640&height=640&fit=bounds)


















































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)











