Download to read offline


![Enabling GPU access with Compose
Build on Open Source
● Compose services can define GPU device reservations
services:
test:
image: nvidia/cuda:10.2-base
command: nvidia-smi
deploy:
resources:
reservations:
devices:
- driver: nvidia
count: 1
capabilities: [gpu, utility]
ia-smi
● Bring up GPU-enabled Docker container
$ docker-compose up
Creating network "gpu_default" with the default driver
Creating gpu_test_1 ... done
Attaching to gpu_test_1
test_1 |
+-----------------------------------------------------
------------------------+
test_1 | | NVIDIA-SMI 450.80.02 Driver Version:
450.80.02 CUDA Version: 11.1 |
test_1 |
|-------------------------------+---------------------
-+----------------------+
======================================================
==============|](https://image.slidesharecdn.com/meetupdeliveringcontainers-basedappstoiotedgedevices-210619053151/75/Delivering-Docker-K3s-worloads-to-IoT-Edge-devices-11-2048.jpg)
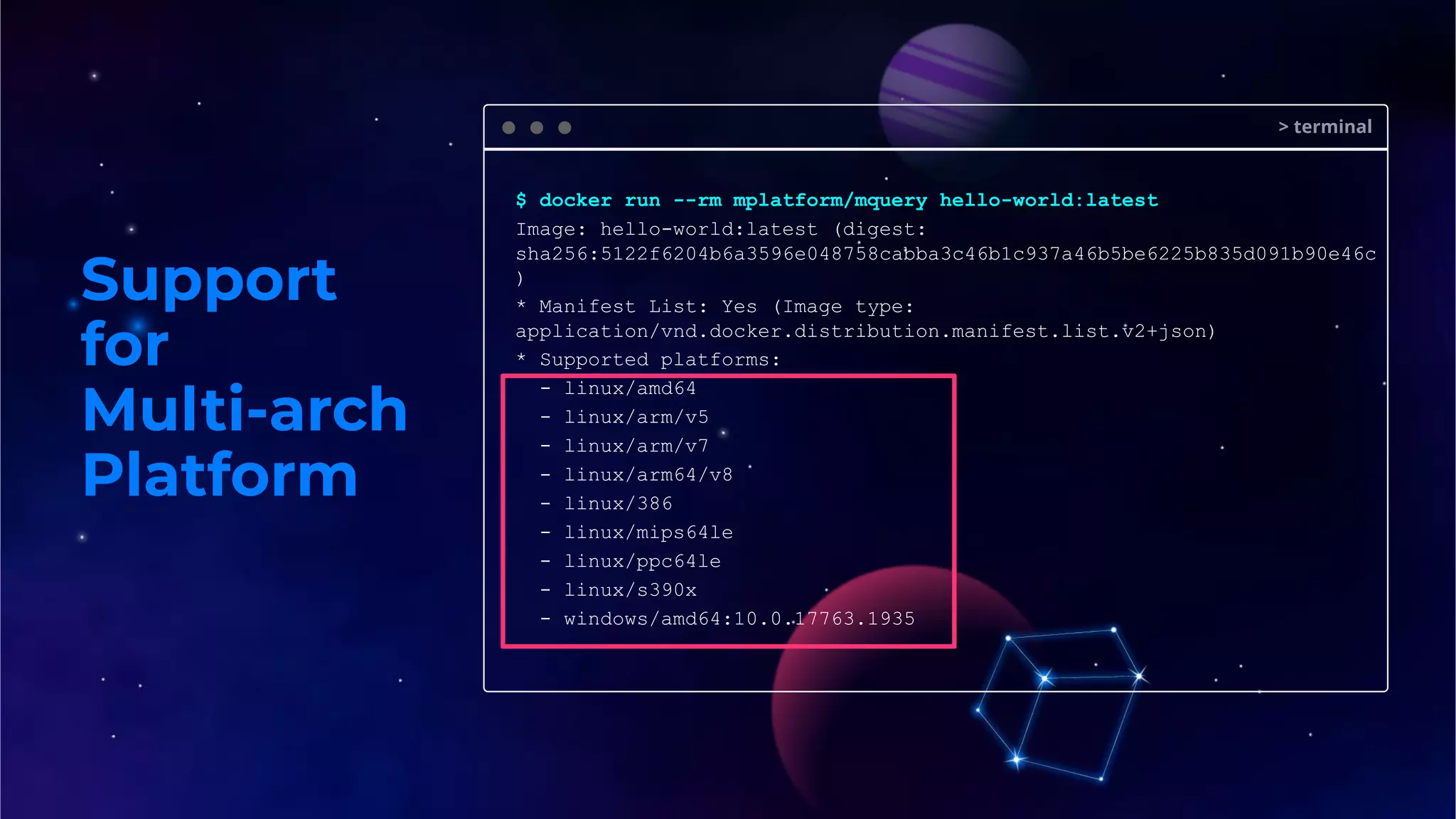
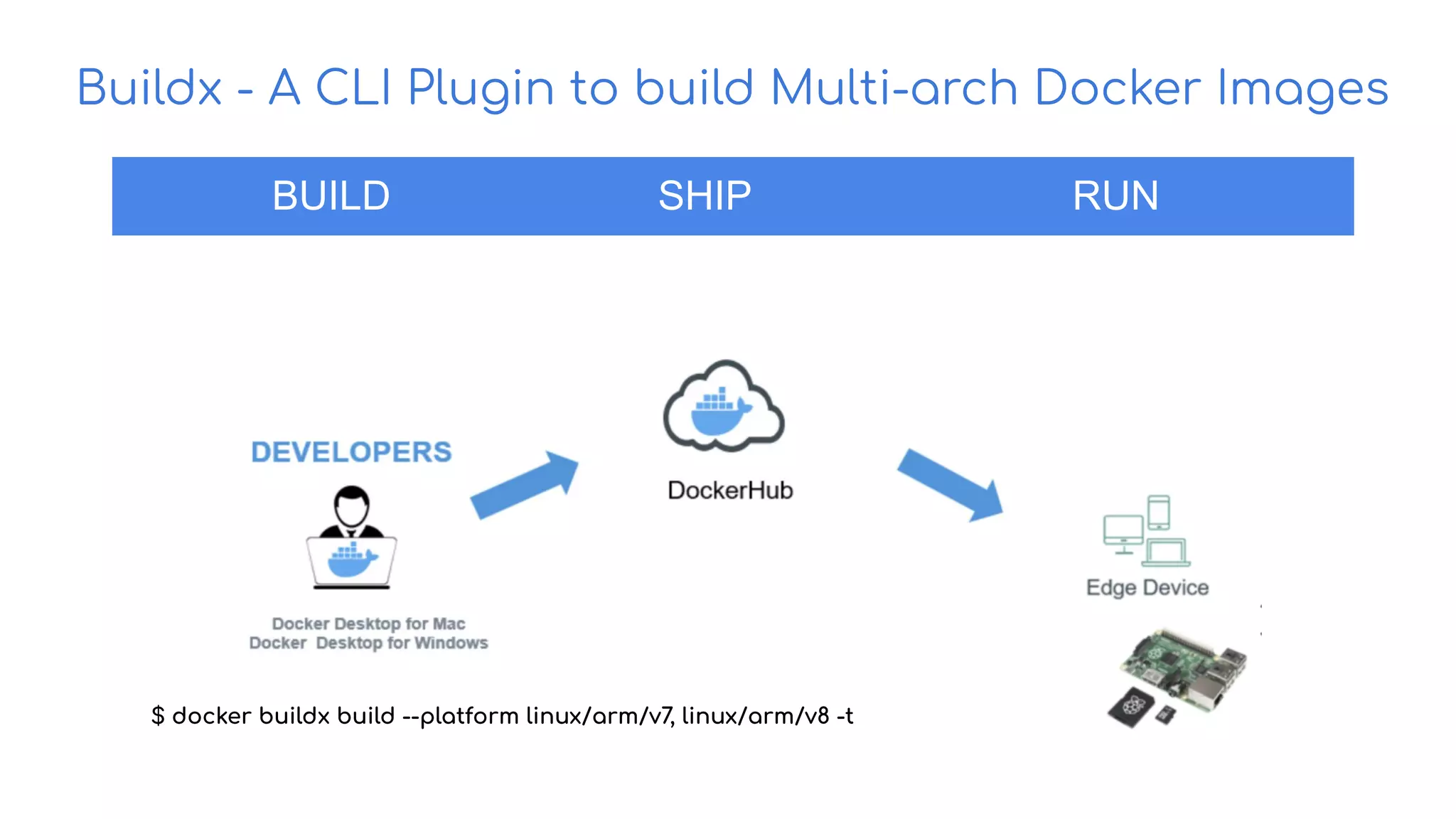
![Support
for
Multi-arch
Platform
Docker Compose v2.0
$ docker compose --project-name demo up
[+] Running 3/4
⠿ Network demo_default Created
4.0s
⠿ Volume "demo_db_data" Created
0.0s
⠿ Container demo_db_1 Started
2.2s
⠿ Container demo_wordpress_1 Starting](https://image.slidesharecdn.com/meetupdeliveringcontainers-basedappstoiotedgedevices-210619053151/75/Delivering-Docker-K3s-worloads-to-IoT-Edge-devices-22-2048.jpg)

![Mask Detection System running on Jetson Nano
[Confidential]
- A Jetson Nano Dev Kit running JetPack 4.4.1 or 4.5
- An external DC 5 volt, 4 amp power supply connected through the Dev Kit's
barrel jack connector (J25). (See these instructions on how to enable barrel
jack power.) This software makes full use of the GPU, so it will not run with
USB power.
- A USB webcam attached to your Nano
- Another computer with a program that can display RTSP streams -- we
suggest VLC or QuickTime.
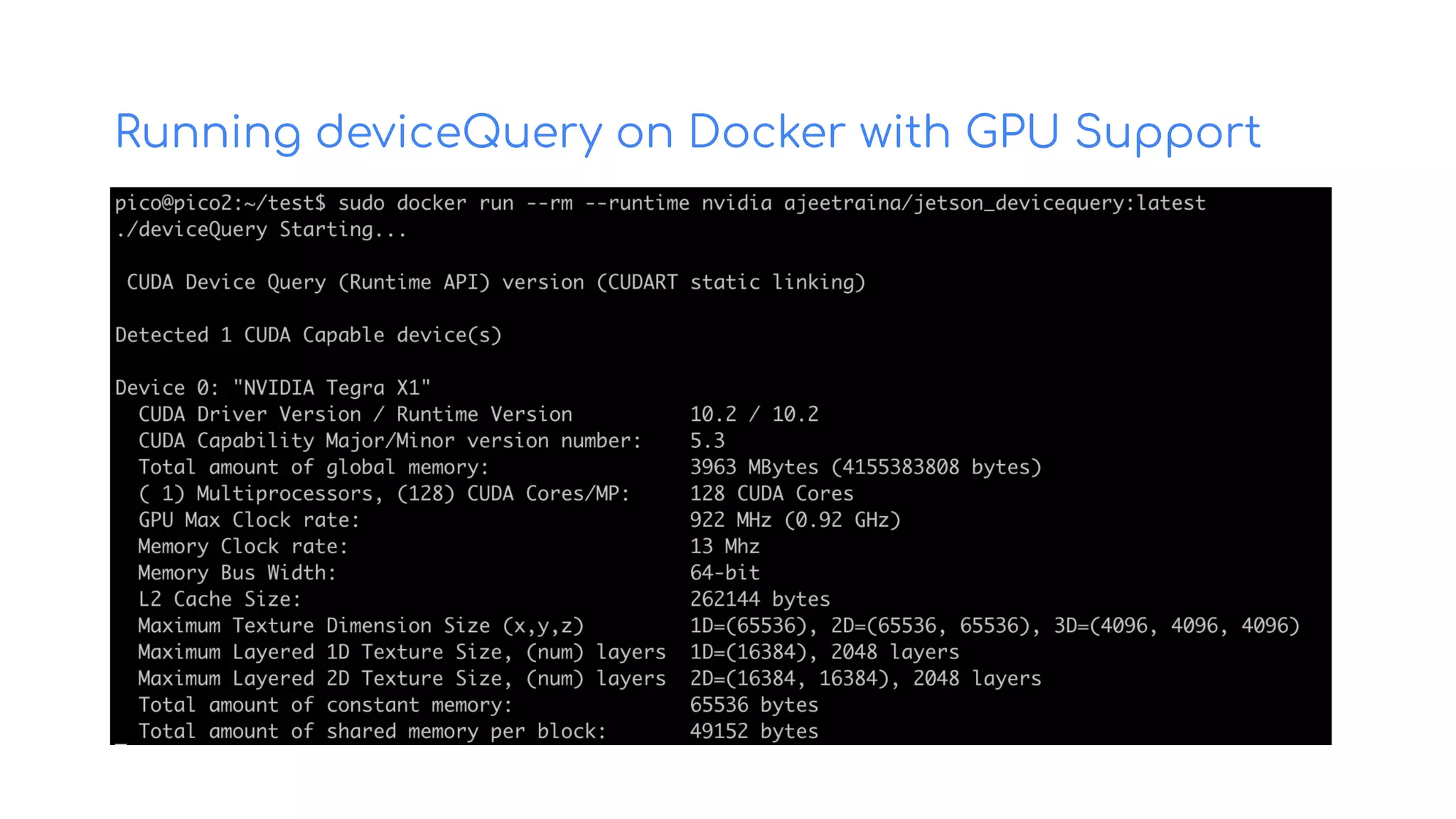
$ sudo docker run --runtime nvidia
--privileged --rm -it
--env MASKCAM_DEVICE_ADDRESS=<your-jetson-ip>
-p 1883:1883
-p 8080:8080
-p 8554:8554
maskcam/maskcam-beta](https://image.slidesharecdn.com/meetupdeliveringcontainers-basedappstoiotedgedevices-210619053151/75/Delivering-Docker-K3s-worloads-to-IoT-Edge-devices-33-2048.jpg)
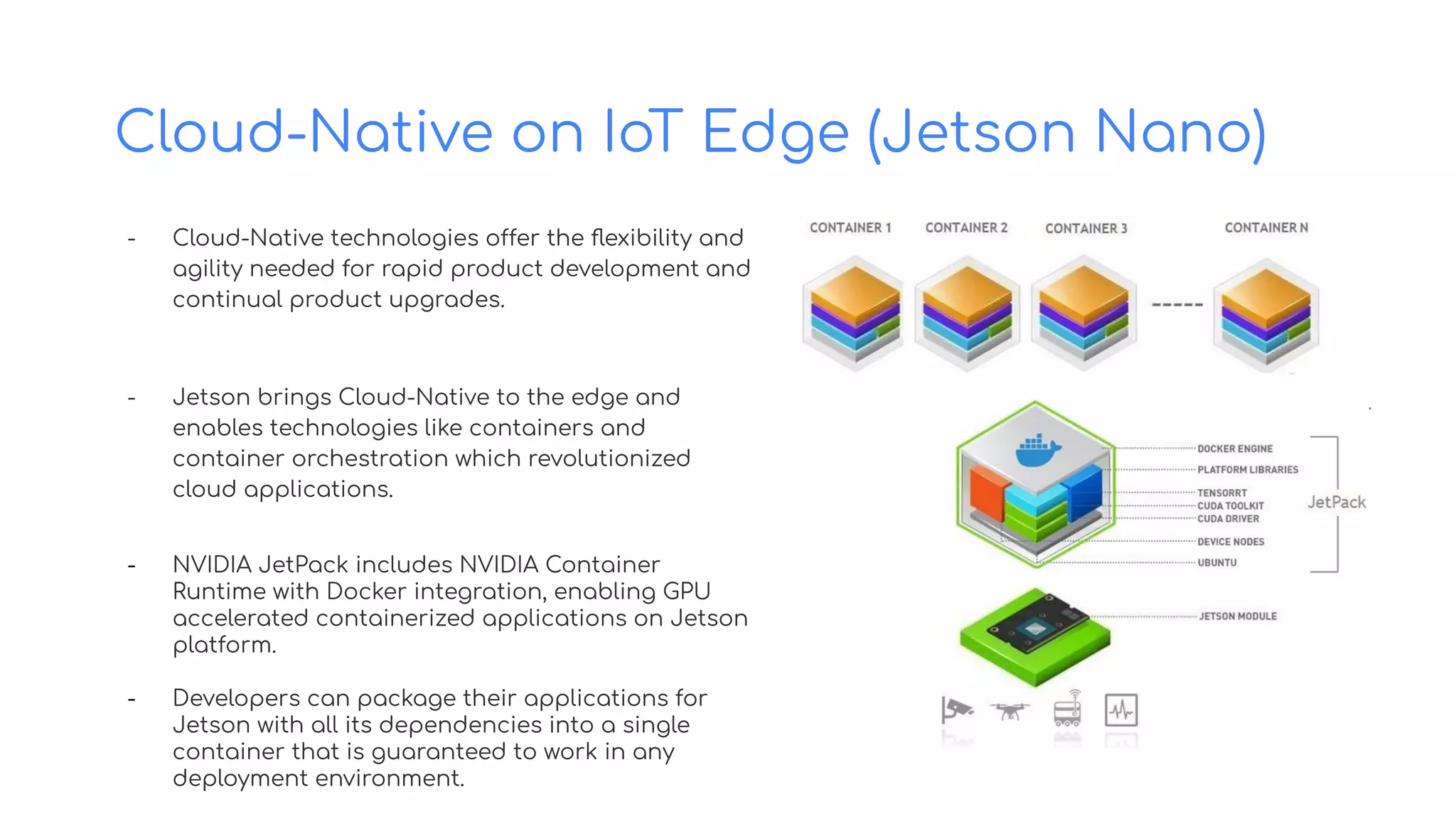
![CherryBot Systems - AI-Powered Payload Delivery System
[Confidential]
- AI-based payload delivery robot
- Low-cost autonomous robot system
- Equipped with NVIDIA Jetson Nano
board, a low-powered AI deployed as
Edge device, a sensor suite that
includes multiple cameras, GPS and
swappable batteries
- Uses deep learning to correctly
interpret data gathered from its
sensors and to make intelligent
decisions that ensure a fast, safe and
cost efficient delivery.
- It can correctly identify objects or
people or detect objects and
obstacles to avoid collisions in a safe
reliable manner.](https://image.slidesharecdn.com/meetupdeliveringcontainers-basedappstoiotedgedevices-210619053151/75/Delivering-Docker-K3s-worloads-to-IoT-Edge-devices-35-2048.jpg)
![CherryBot Systems - AI-Powered Payload Delivery System
[Confidential]](https://image.slidesharecdn.com/meetupdeliveringcontainers-basedappstoiotedgedevices-210619053151/75/Delivering-Docker-K3s-worloads-to-IoT-Edge-devices-36-2048.jpg)
![CherryBot Systems
[Confidential]
Food Delivery Swag Distribution Medicine Delivery](https://image.slidesharecdn.com/meetupdeliveringcontainers-basedappstoiotedgedevices-210619053151/75/Delivering-Docker-K3s-worloads-to-IoT-Edge-devices-37-2048.jpg)


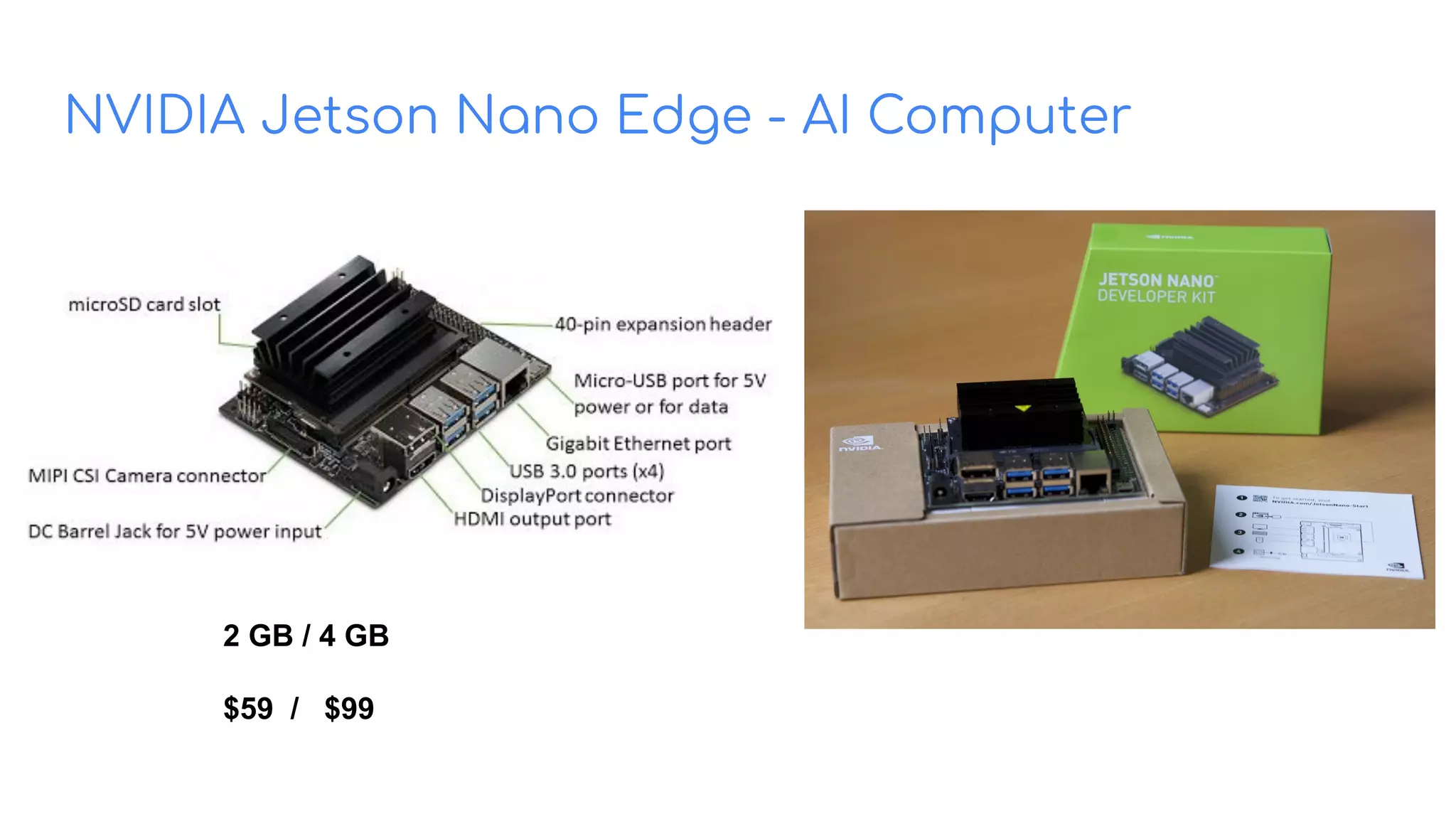
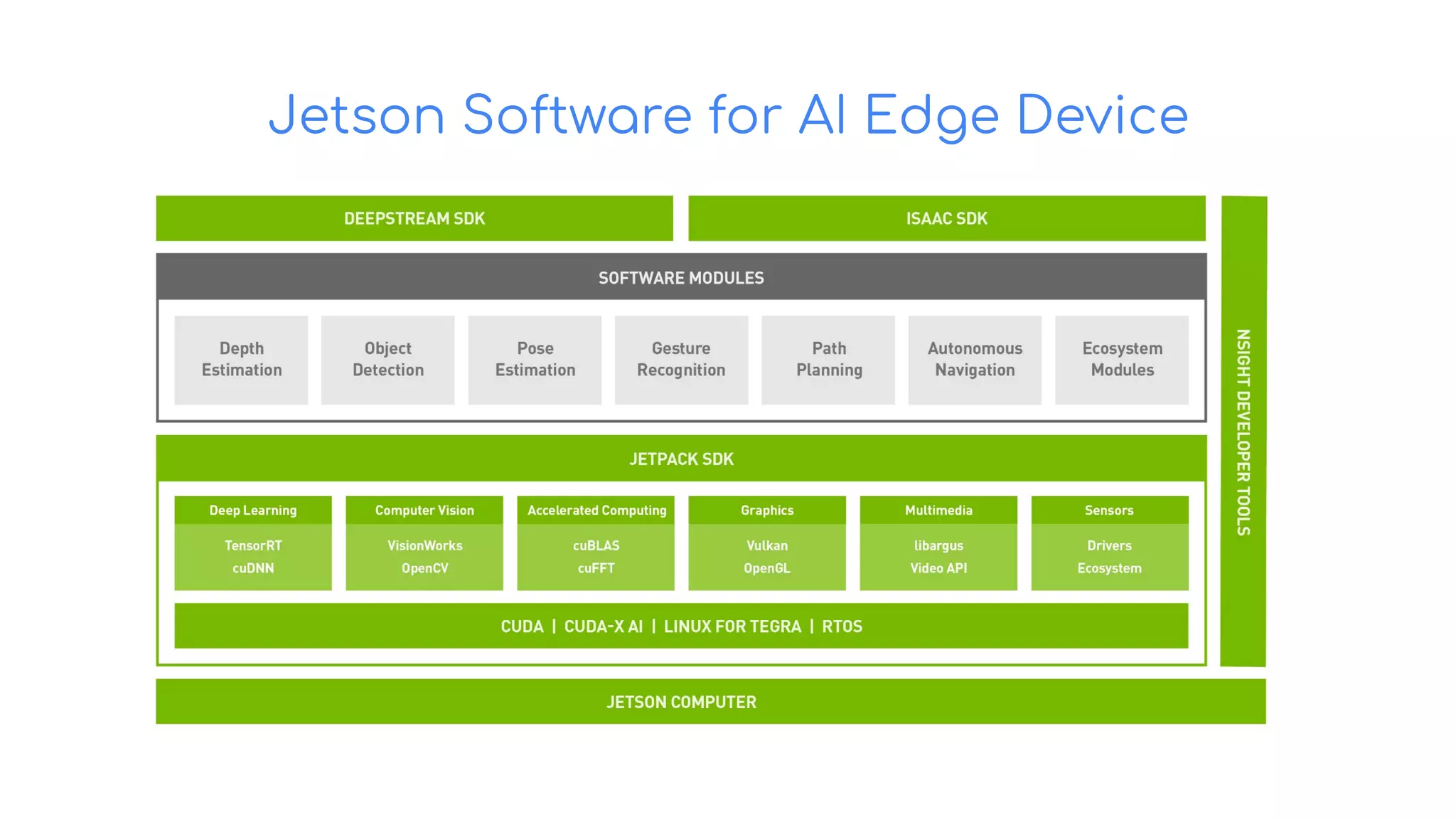
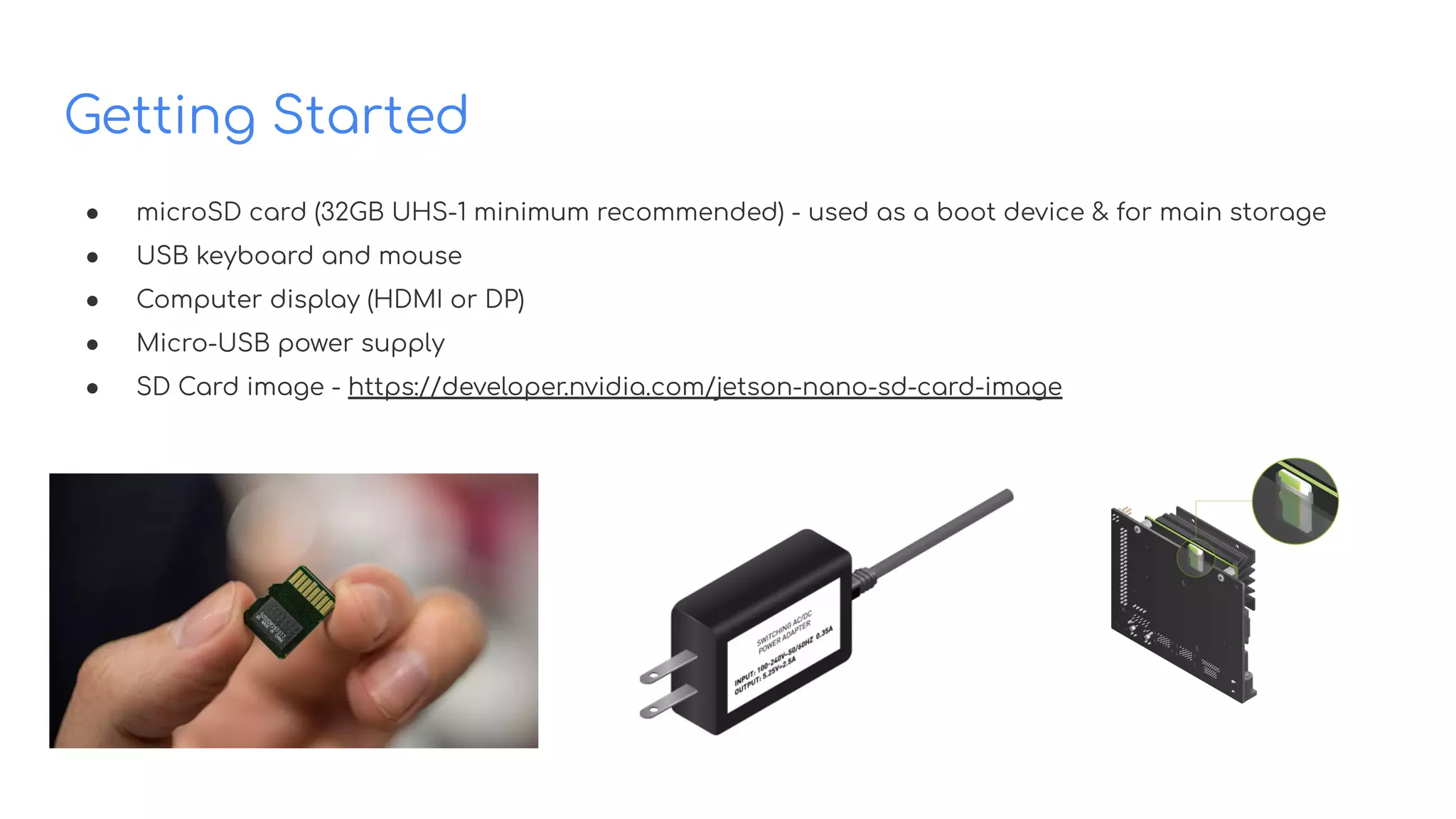
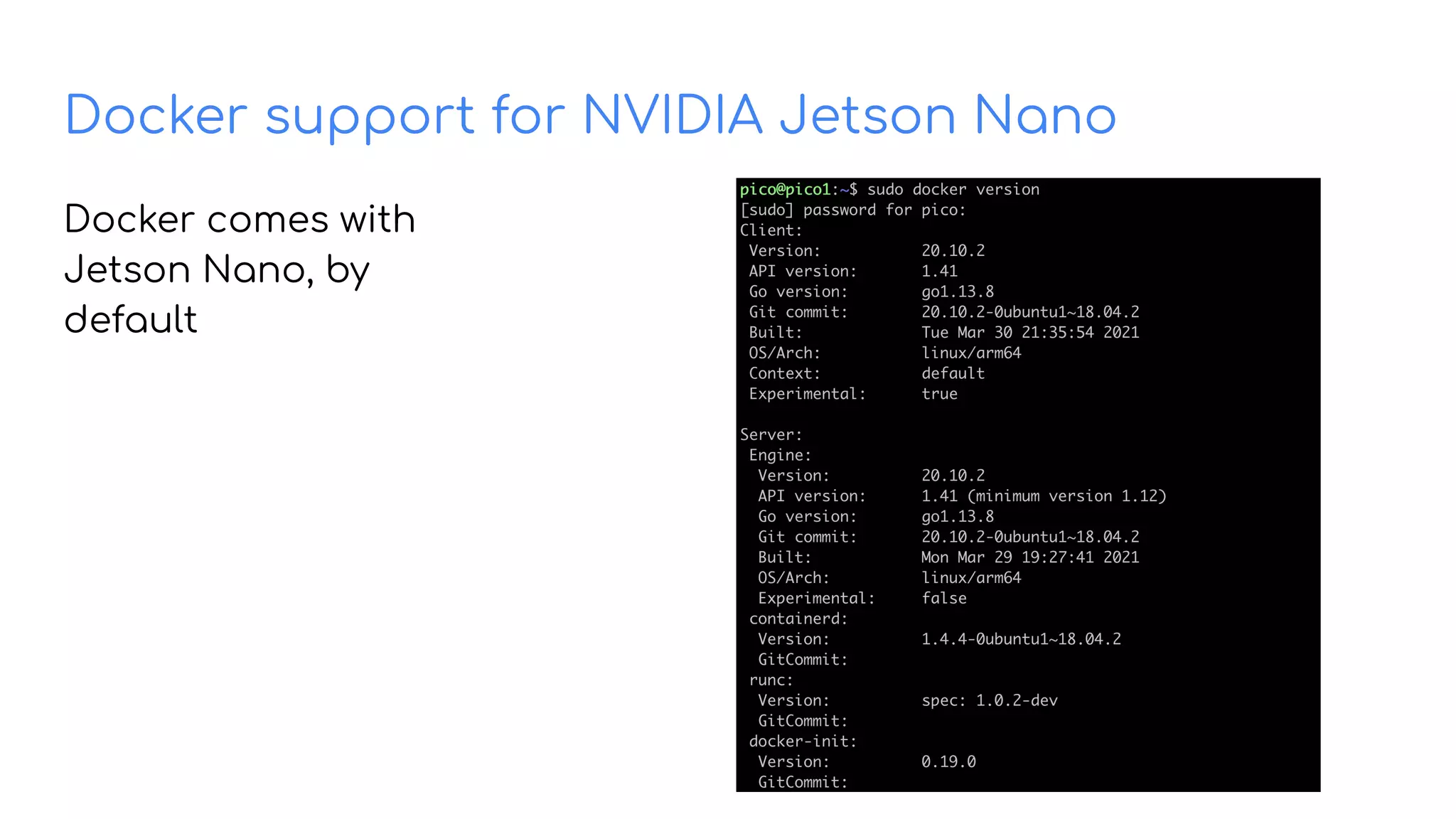
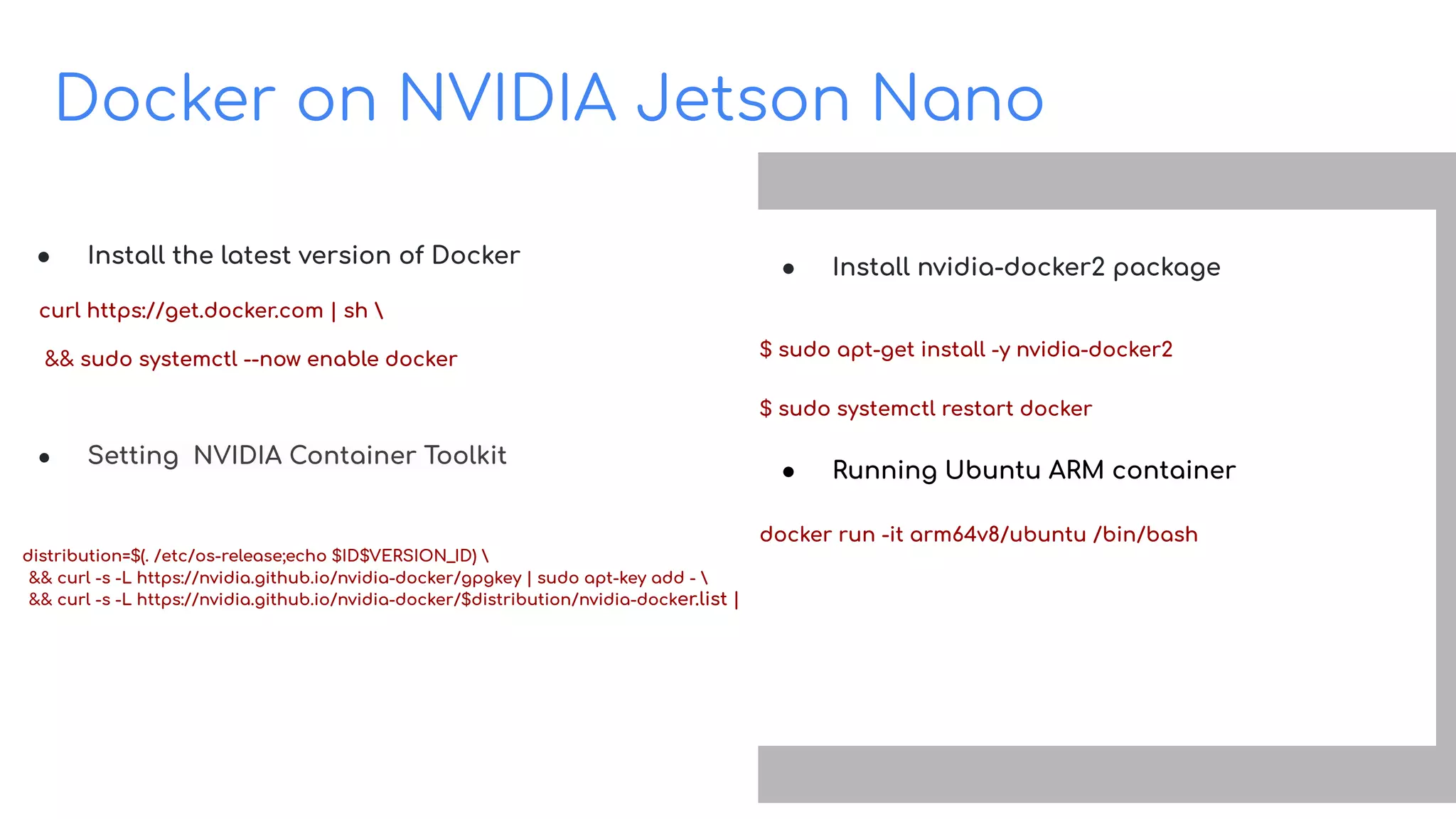
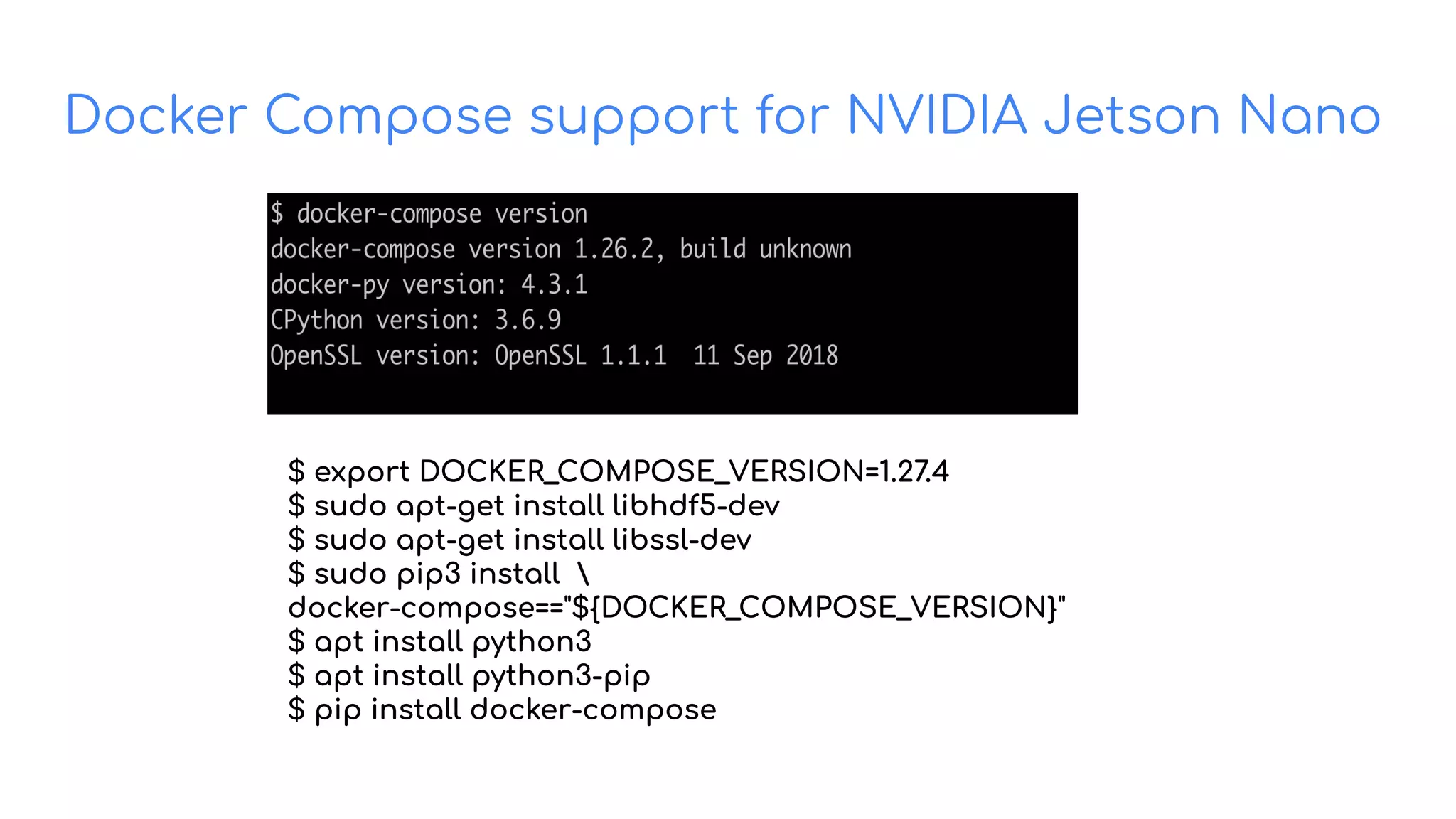
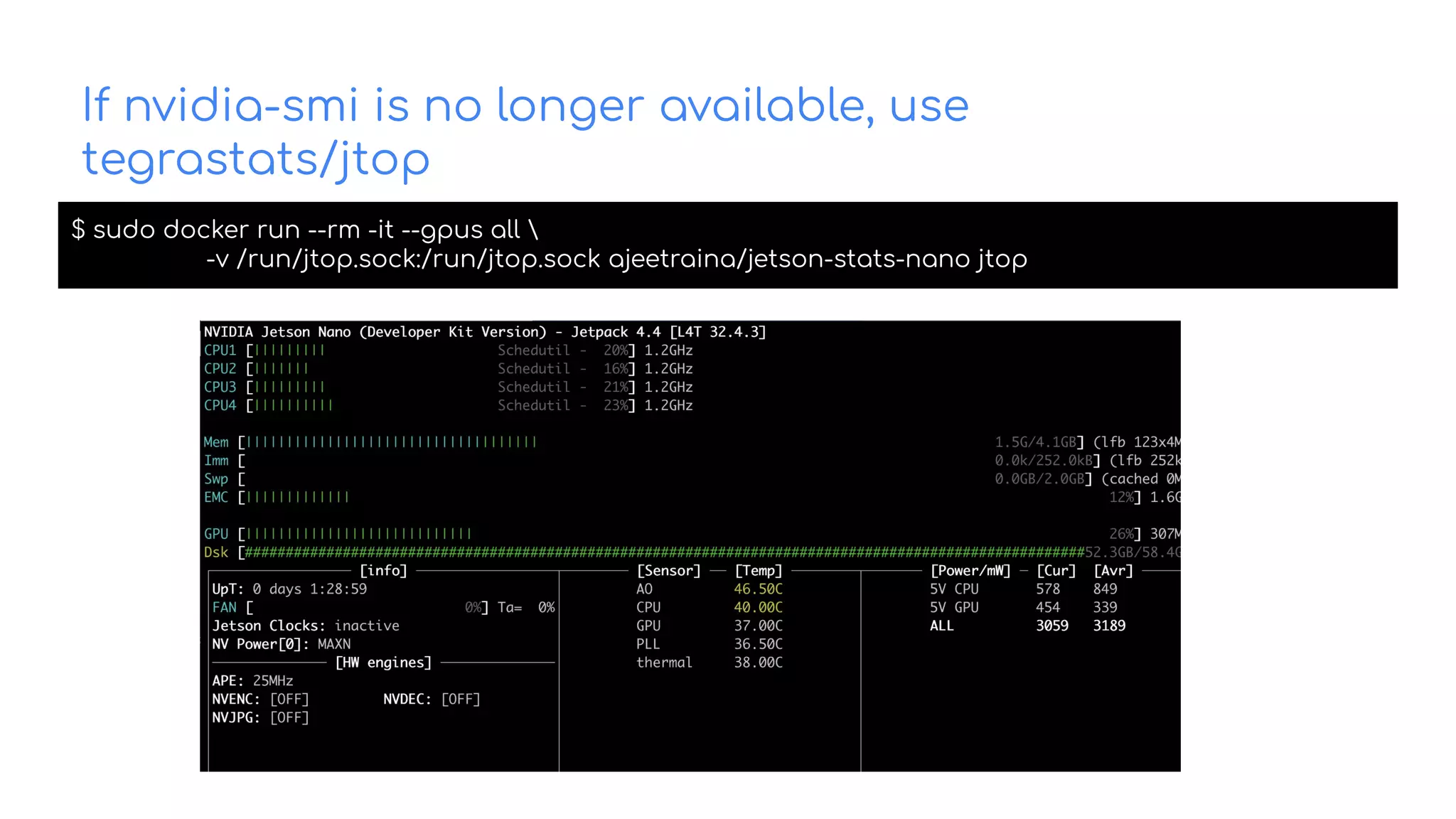
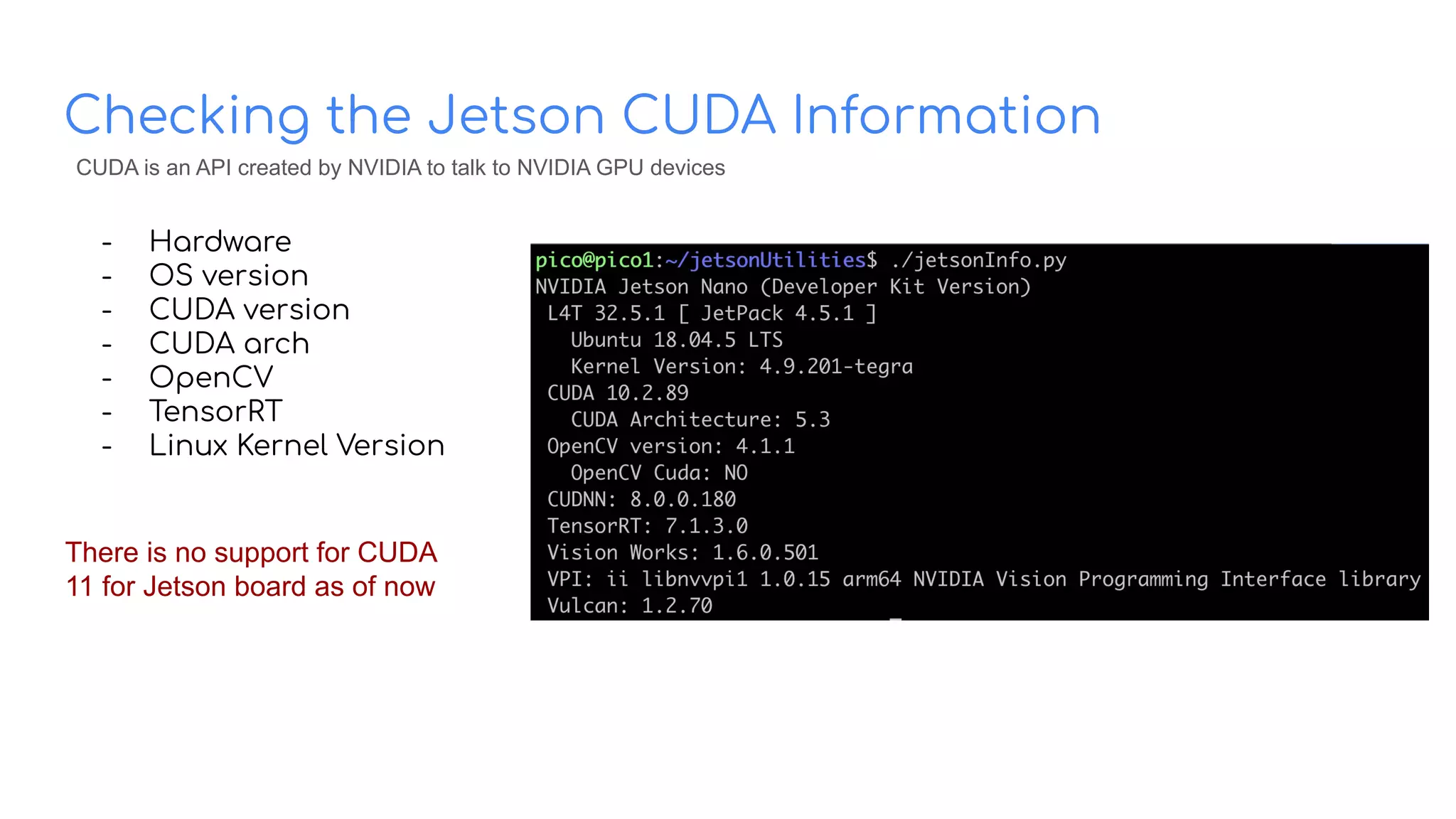
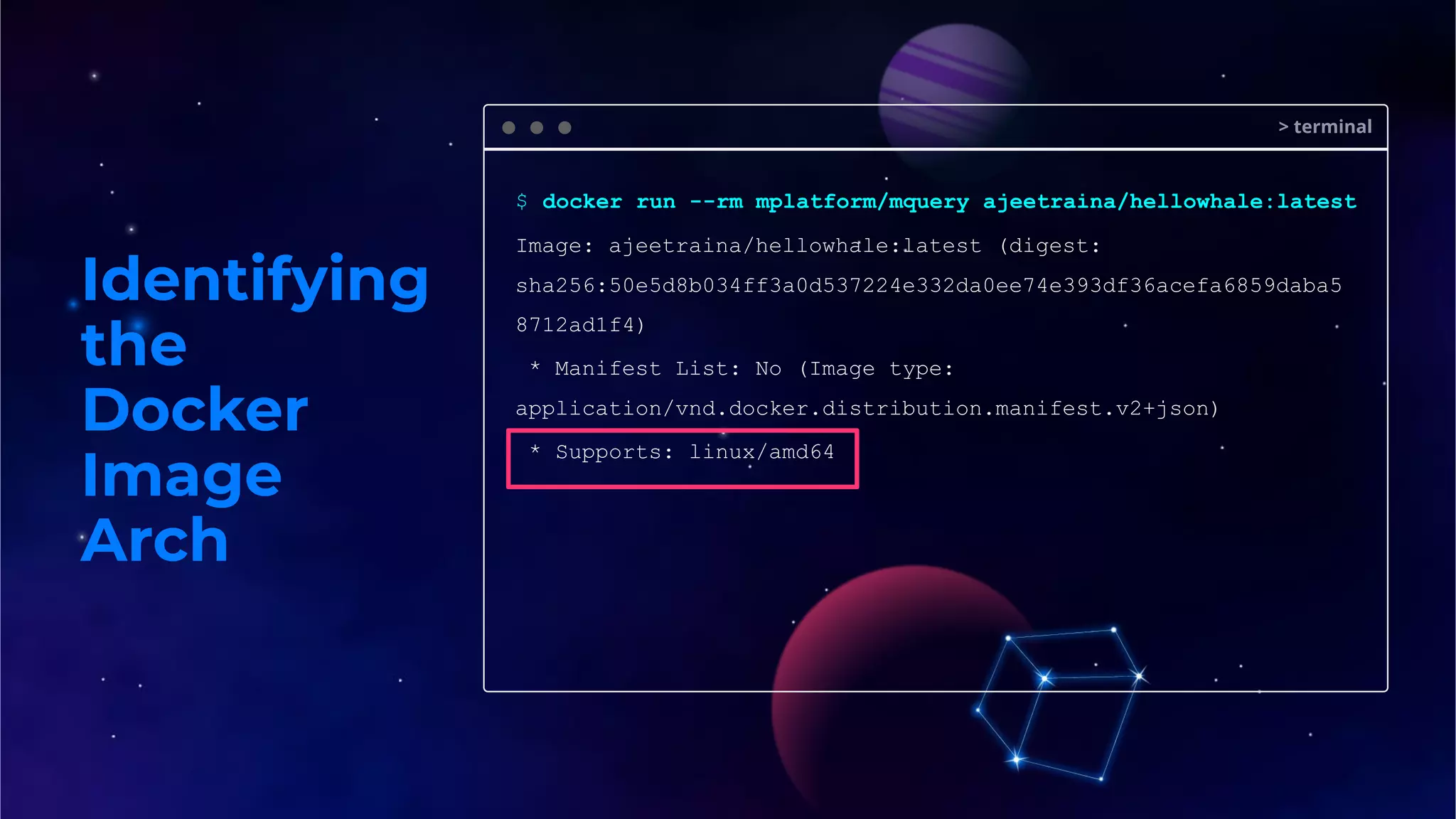
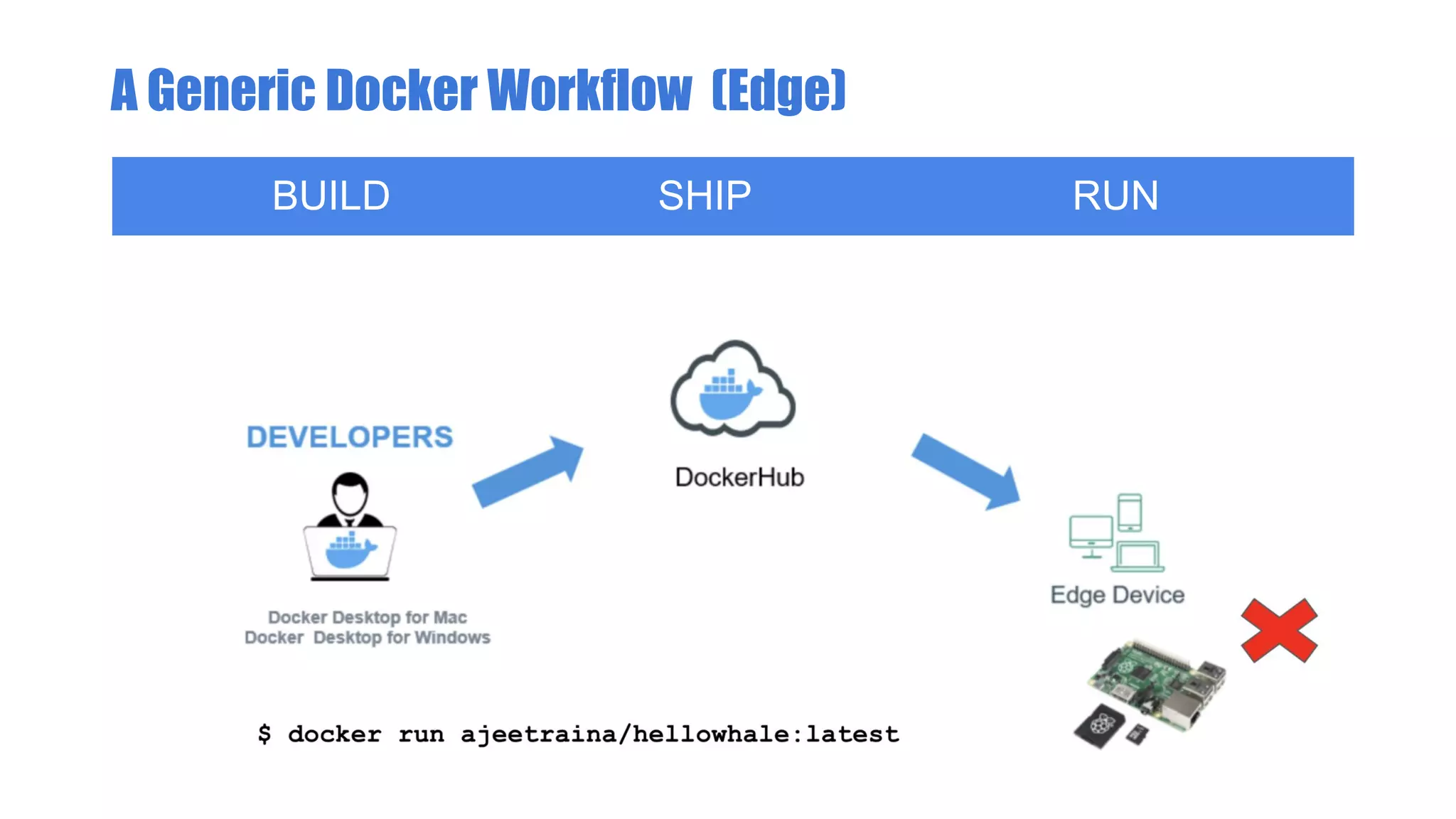
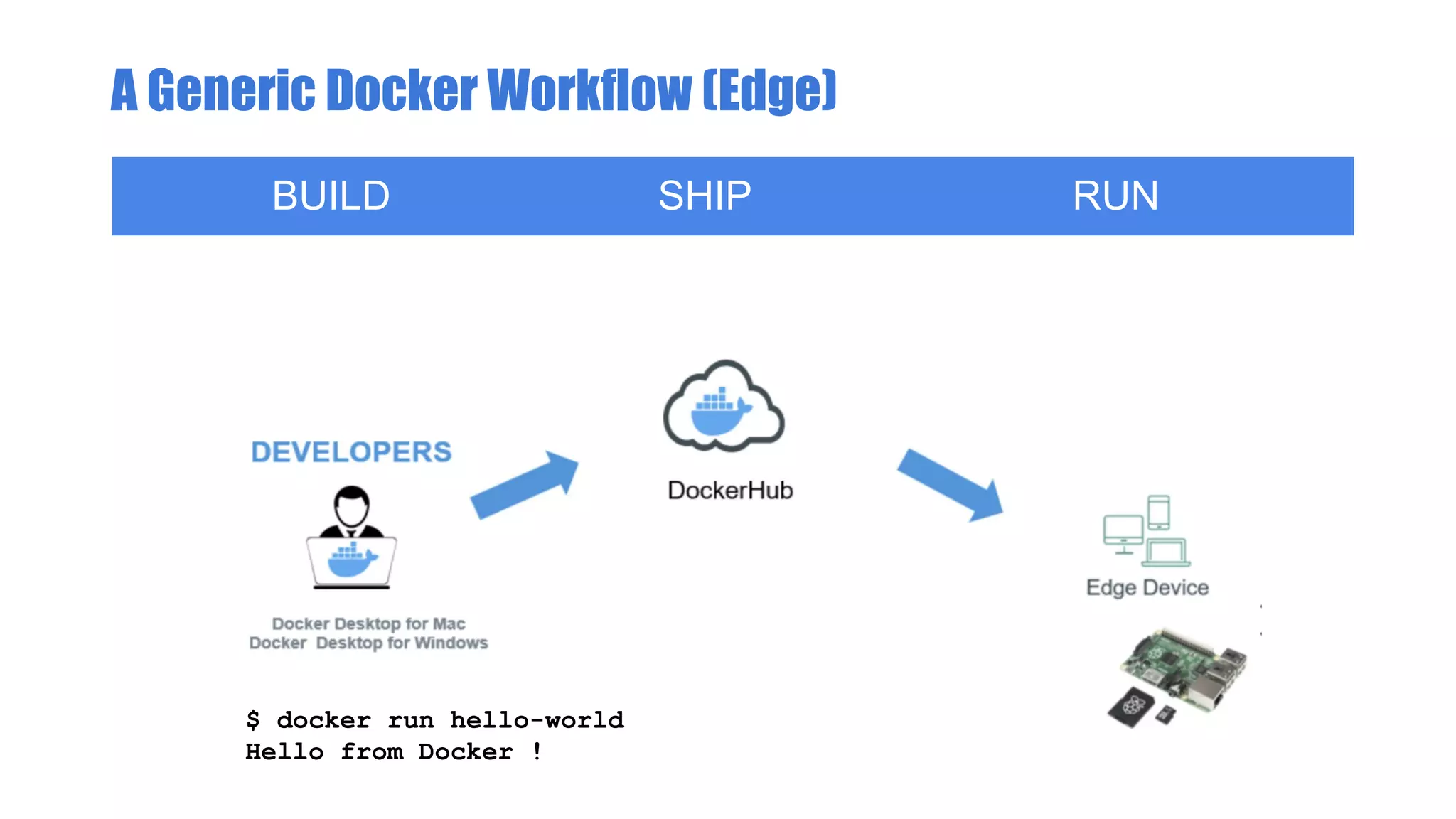
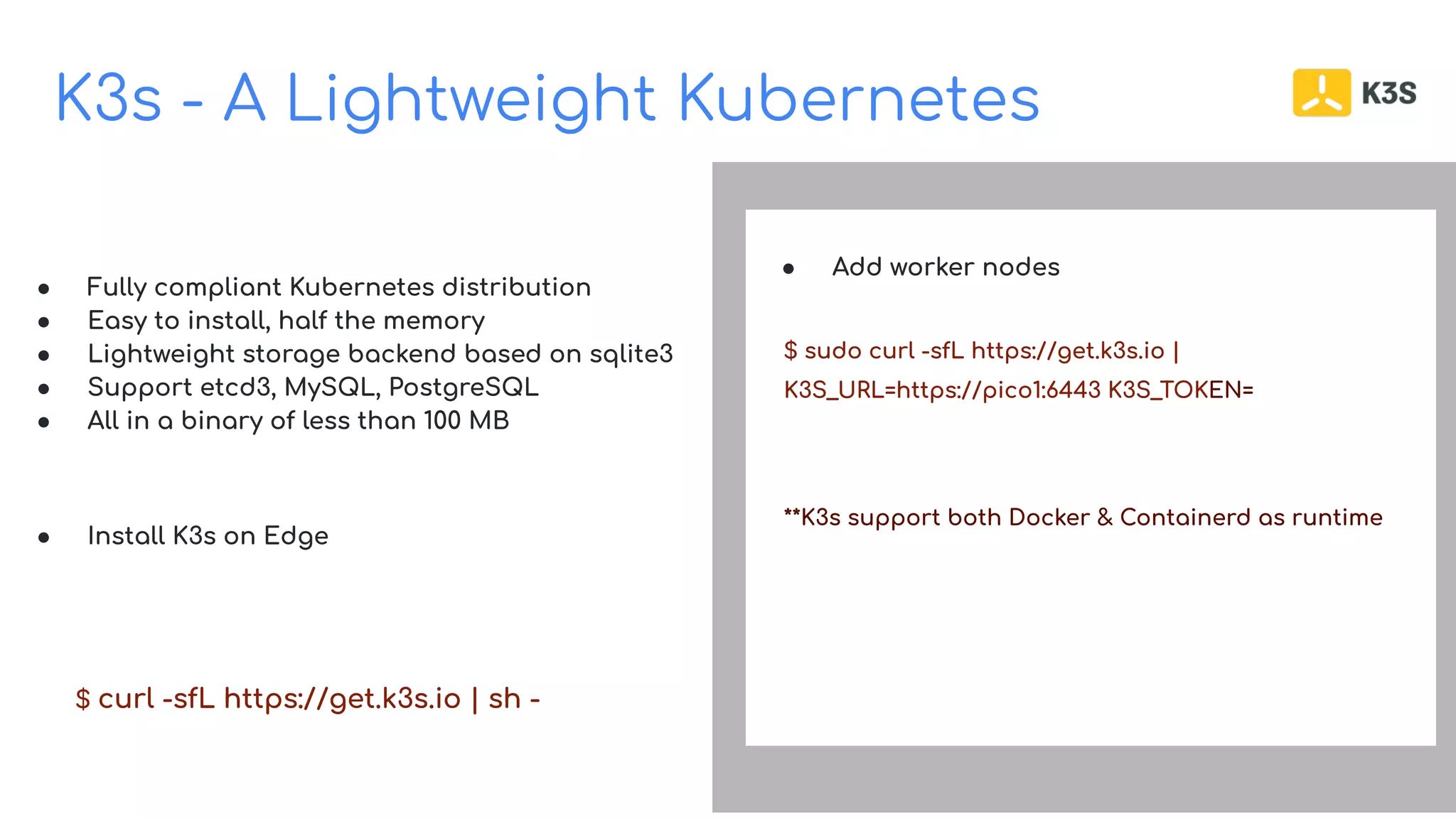
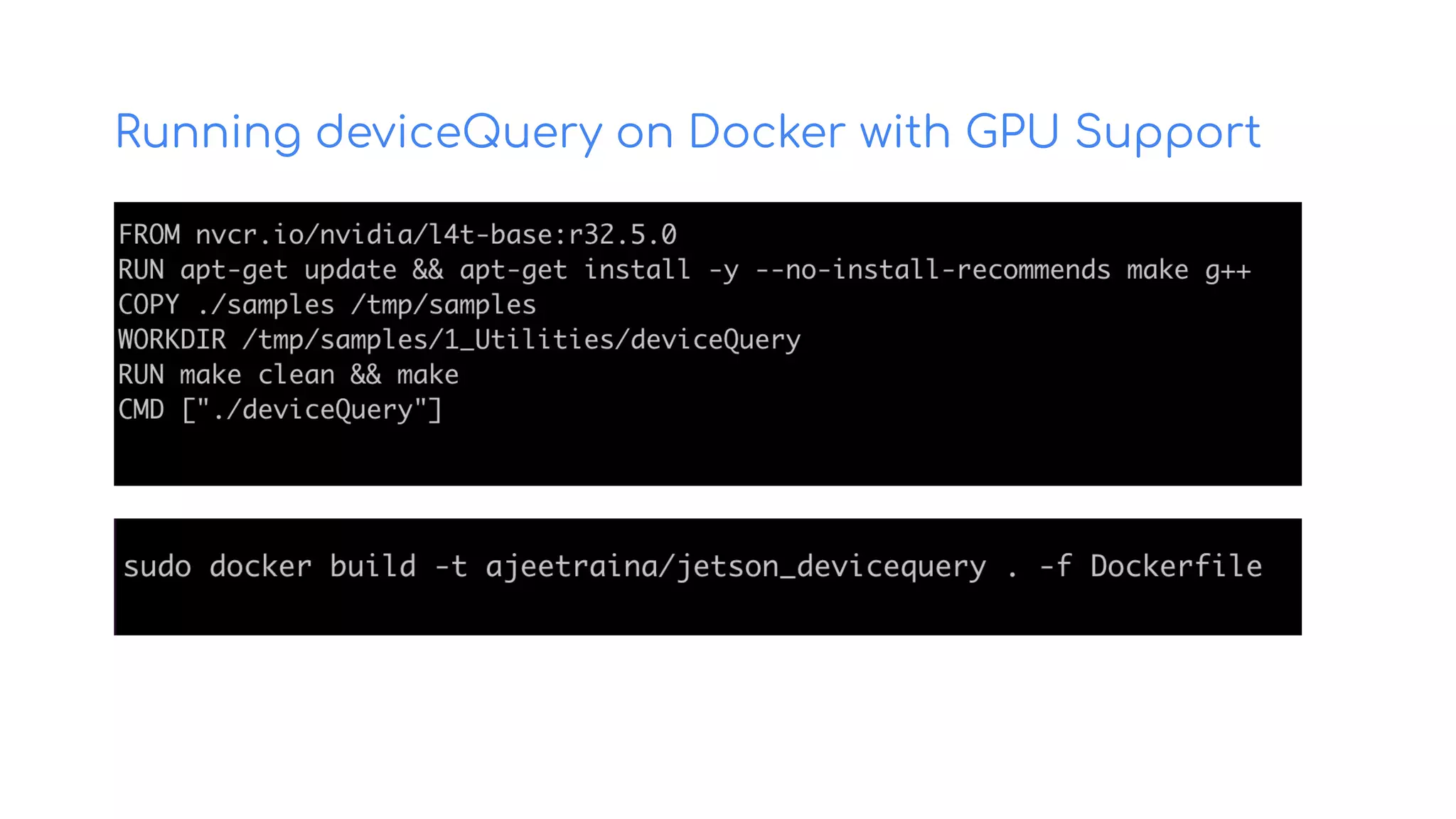
The document discusses the integration of Docker and K3s with NVIDIA Jetson Nano for IoT edge computing, highlighting its capabilities for AI applications and GPU-accelerated containerized environments. It provides installation instructions and workflows for deploying applications, including examples of real-time systems for mask detection and drone delivery services. Key features of K3s as a lightweight Kubernetes distribution and Docker's support for multi-architecture are also emphasized.








![[오픈소스컨설팅]쿠버네티스를 활용한 개발환경 구축](https://cdn.slidesharecdn.com/ss_thumbnails/opensourceconsutingkubernetesv0-191010000815-thumbnail.jpg?width=640&height=640&fit=bounds)


![[오픈소스컨설팅] EFK Stack 소개와 설치 방법](https://cdn.slidesharecdn.com/ss_thumbnails/elasticstack-210712042246-thumbnail.jpg?width=640&height=640&fit=bounds)




![[OpenInfra Days Korea 2018] Day 2 - CEPH 운영자를 위한 Object Storage Performance T...](https://cdn.slidesharecdn.com/ss_thumbnails/openinfradayobjectstorageperformancefinal2-180704062033-thumbnail.jpg?width=640&height=640&fit=bounds)








![[242]open stack neutron dataplane 구현](https://cdn.slidesharecdn.com/ss_thumbnails/242openstackneutron-dataplane-171017004554-thumbnail.jpg?width=640&height=640&fit=bounds)