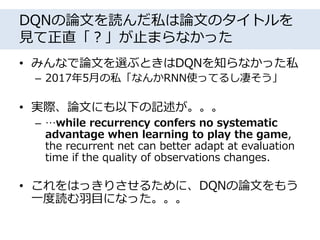
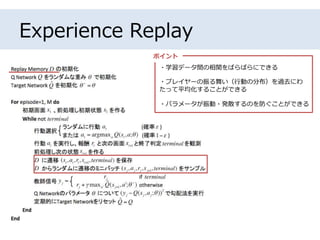
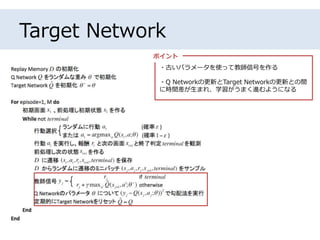
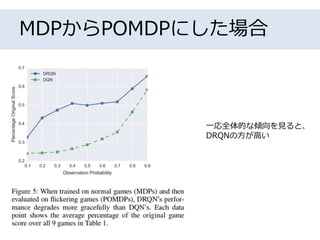
夏のDQN祭り~第二弾~ 以下の論文紹介の資料です。 Deep Recurrent Q-Learning for Partially Observable MDPs https://arxiv.org/abs/1507.06527







![[DL輪読会]Decision Transformer: Reinforcement Learning via Sequence Modeling](https://cdn.slidesharecdn.com/ss_thumbnails/decisiontransformer20210709zhangxin-210709021501-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DL輪読会]逆強化学習とGANs](https://cdn.slidesharecdn.com/ss_thumbnails/irlgans-171128063119-thumbnail.jpg?width=640&height=640&fit=bounds)

![SSII2021 [OS2-02] 深層学習におけるデータ拡張の原理と最新動向](https://cdn.slidesharecdn.com/ss_thumbnails/os2-03latest-210610045610-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]ICLR2020の分布外検知速報](https://cdn.slidesharecdn.com/ss_thumbnails/iclr2020ood-190927011524-thumbnail.jpg?width=640&height=640&fit=bounds)






![[DL輪読会] マルチエージェント強化学習と心の理論](https://cdn.slidesharecdn.com/ss_thumbnails/0917imai-211210044729-thumbnail.jpg?width=640&height=640&fit=bounds)





![[DL輪読会]Hindsight Experience Replay](https://cdn.slidesharecdn.com/ss_thumbnails/her-180105002310-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]大規模分散強化学習の難しい問題設定への適用](https://cdn.slidesharecdn.com/ss_thumbnails/drlapplication-180921001838-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]Learning Latent Dynamics for Planning from Pixels](https://cdn.slidesharecdn.com/ss_thumbnails/taniguchi20181221-190104064850-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Grokking: Generalization Beyond Overfitting on Small Algorithmic Datasets](https://cdn.slidesharecdn.com/ss_thumbnails/20220325okimura-220405024717-thumbnail.jpg?width=640&height=640&fit=bounds)





![[DL輪読会]Xception: Deep Learning with Depthwise Separable Convolutions](https://cdn.slidesharecdn.com/ss_thumbnails/2017-06-22-170623004409-thumbnail.jpg?width=640&height=640&fit=bounds)



















![[CV勉強会]Active Object Localization with Deep Reinfocement Learning](https://cdn.slidesharecdn.com/ss_thumbnails/20160204objectdetectionrl-160206032348-thumbnail.jpg?width=640&height=640&fit=bounds)









