Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Hakky St
PPTX, PDF
3,391 views
スパース性に基づく機械学習(機械学習プロフェッショナルシリーズ) 2.3節〜2.5節
スパース性に基づく機械学習(機械学習プロフェッショナルシリーズ)の勉強会の資料です。 2.3節〜2.5節のスライドです。
Data & Analytics
◦
Related topics:
Data Science Insights
•
Data Mining Insights
•
Read more
1
Save
Share
Embed
Embed presentation
Download
Downloaded 36 times
1
/ 24
2
/ 24
Most read
3
/ 24
4
/ 24
5
/ 24
6
/ 24
Most read
7
/ 24
8
/ 24
9
/ 24
10
/ 24
11
/ 24
12
/ 24
13
/ 24
14
/ 24
15
/ 24
16
/ 24
17
/ 24
18
/ 24
19
/ 24
20
/ 24
21
/ 24
22
/ 24
23
/ 24
24
/ 24
More Related Content
PPTX
スパース性に基づく機械学習(機械学習プロフェッショナルシリーズ) 1章
by
Hakky St
PDF
coordinate descent 法について
by
京都大学大学院情報学研究科数理工学専攻
PDF
なぜベイズ統計はリスク分析に向いているのか? その哲学上および実用上の理由
by
takehikoihayashi
PPTX
スパース性に基づく機械学習 2章 データからの学習
by
hagino 3000
PDF
DARM勉強会第3回 (missing data analysis)
by
Masaru Tokuoka
PDF
「内積が見えると統計学も見える」第5回 プログラマのための数学勉強会 発表資料
by
Ken'ichi Matsui
PPTX
Imputation of Missing Values using Random Forest
by
Satoshi Kato
PPTX
海鳥の経路予測のための逆強化学習
by
Tsubasa Hirakawa
スパース性に基づく機械学習(機械学習プロフェッショナルシリーズ) 1章
by
Hakky St
coordinate descent 法について
by
京都大学大学院情報学研究科数理工学専攻
なぜベイズ統計はリスク分析に向いているのか? その哲学上および実用上の理由
by
takehikoihayashi
スパース性に基づく機械学習 2章 データからの学習
by
hagino 3000
DARM勉強会第3回 (missing data analysis)
by
Masaru Tokuoka
「内積が見えると統計学も見える」第5回 プログラマのための数学勉強会 発表資料
by
Ken'ichi Matsui
Imputation of Missing Values using Random Forest
by
Satoshi Kato
海鳥の経路予測のための逆強化学習
by
Tsubasa Hirakawa
What's hot
PDF
統計的因果推論への招待 -因果構造探索を中心に-
by
Shiga University, RIKEN
PDF
基礎からのベイズ統計学 輪読会資料 第1章 確率に関するベイズの定理
by
Ken'ichi Matsui
PPTX
ノンパラメトリックベイズを用いた逆強化学習
by
Shota Ishikawa
PDF
クラシックな機械学習入門:付録:よく使う線形代数の公式
by
Hiroshi Nakagawa
PDF
データ解析7 主成分分析の基礎
by
Hirotaka Hachiya
PDF
整数計画法に基づく説明可能性な機械学習へのアプローチ
by
Kentaro Kanamori
PDF
ロジスティック回帰分析の書き方
by
Sayuri Shimizu
PDF
2 4.devianceと尤度比検定
by
logics-of-blue
PPTX
Rで因子分析 商用ソフトで実行できない因子分析のあれこれ
by
Hiroshi Shimizu
PPTX
勾配降下法の 最適化アルゴリズム
by
nishio
PDF
MICの解説
by
logics-of-blue
PDF
2 3.GLMの基礎
by
logics-of-blue
PDF
“機械学習の説明”の信頼性
by
Satoshi Hara
PDF
心理学におけるベイズ統計の流行を整理する
by
Hiroshi Shimizu
PPTX
15分でわかる(範囲の)ベイズ統計学
by
Ken'ichi Matsui
PDF
R言語で学ぶマーケティング分析 競争ポジショニング戦略
by
Yohei Sato
PDF
2 2.尤度と最尤法
by
logics-of-blue
PDF
ベイズモデリングと仲良くするために
by
Shushi Namba
PDF
2 5 2.一般化線形モデル色々_ロジスティック回帰
by
logics-of-blue
PDF
劣モジュラ最適化と機械学習 2.0-2.3 劣モジュラ関数の基本性質・例・最適化
by
Akiyoshi Hara
統計的因果推論への招待 -因果構造探索を中心に-
by
Shiga University, RIKEN
基礎からのベイズ統計学 輪読会資料 第1章 確率に関するベイズの定理
by
Ken'ichi Matsui
ノンパラメトリックベイズを用いた逆強化学習
by
Shota Ishikawa
クラシックな機械学習入門:付録:よく使う線形代数の公式
by
Hiroshi Nakagawa
データ解析7 主成分分析の基礎
by
Hirotaka Hachiya
整数計画法に基づく説明可能性な機械学習へのアプローチ
by
Kentaro Kanamori
ロジスティック回帰分析の書き方
by
Sayuri Shimizu
2 4.devianceと尤度比検定
by
logics-of-blue
Rで因子分析 商用ソフトで実行できない因子分析のあれこれ
by
Hiroshi Shimizu
勾配降下法の 最適化アルゴリズム
by
nishio
MICの解説
by
logics-of-blue
2 3.GLMの基礎
by
logics-of-blue
“機械学習の説明”の信頼性
by
Satoshi Hara
心理学におけるベイズ統計の流行を整理する
by
Hiroshi Shimizu
15分でわかる(範囲の)ベイズ統計学
by
Ken'ichi Matsui
R言語で学ぶマーケティング分析 競争ポジショニング戦略
by
Yohei Sato
2 2.尤度と最尤法
by
logics-of-blue
ベイズモデリングと仲良くするために
by
Shushi Namba
2 5 2.一般化線形モデル色々_ロジスティック回帰
by
logics-of-blue
劣モジュラ最適化と機械学習 2.0-2.3 劣モジュラ関数の基本性質・例・最適化
by
Akiyoshi Hara
Similar to スパース性に基づく機械学習(機械学習プロフェッショナルシリーズ) 2.3節〜2.5節
PDF
機械学習モデルの列挙
by
Satoshi Hara
PDF
Sparse estimation tutorial 2014
by
Taiji Suzuki
PDF
スパースモデリング、スパースコーディングとその数理(第11回WBA若手の会)
by
narumikanno0918
PDF
岩波データサイエンス_Vol.5_勉強会資料02
by
goony0101
PDF
東京都市大学 データ解析入門 5 スパース性と圧縮センシング 2
by
hirokazutanaka
PPTX
スパース性に基づく機械学習(機械学習プロフェッショナルシリーズ) 3.3節と3.4節
by
Hakky St
PDF
Sparse models
by
Daisuke Yoneoka
PDF
スパース性に基づく機械学習 4.1 ノイズなしL1ノルム最小化問題の問題設定
by
Akiyoshi Hara
PDF
スパース性に基づく機械学習 3.2 L1ノルム正則化
by
Akiyoshi Hara
PPTX
スパース性に基づく機械学習(機械学習プロフェッショナルシリーズ) 4.2節
by
Hakky St
PDF
スパース推定
by
y-uti
PDF
ML: Sparse regression CH.13
by
Daisuke Yoneoka
機械学習モデルの列挙
by
Satoshi Hara
Sparse estimation tutorial 2014
by
Taiji Suzuki
スパースモデリング、スパースコーディングとその数理(第11回WBA若手の会)
by
narumikanno0918
岩波データサイエンス_Vol.5_勉強会資料02
by
goony0101
東京都市大学 データ解析入門 5 スパース性と圧縮センシング 2
by
hirokazutanaka
スパース性に基づく機械学習(機械学習プロフェッショナルシリーズ) 3.3節と3.4節
by
Hakky St
Sparse models
by
Daisuke Yoneoka
スパース性に基づく機械学習 4.1 ノイズなしL1ノルム最小化問題の問題設定
by
Akiyoshi Hara
スパース性に基づく機械学習 3.2 L1ノルム正則化
by
Akiyoshi Hara
スパース性に基づく機械学習(機械学習プロフェッショナルシリーズ) 4.2節
by
Hakky St
スパース推定
by
y-uti
ML: Sparse regression CH.13
by
Daisuke Yoneoka
More from Hakky St
PPTX
劣モジュラ最適化と機械学習1章
by
Hakky St
PPTX
劣モジュラ最適化と機械学習 3章
by
Hakky St
PPTX
劣モジュラ最適化と機械学習 2.4節
by
Hakky St
PPTX
劣モジュラ最適化と機械学習 2.5節
by
Hakky St
PPTX
Deep Recurrent Q-Learning(DRQN) for Partially Observable MDPs
by
Hakky St
PPTX
【機械学習プロフェッショナルシリーズ】グラフィカルモデル1章
by
Hakky St
PPTX
Hands-On Machine Learning with Scikit-Learn and TensorFlow - Chapter8
by
Hakky St
PPTX
Reducing the dimensionality of data with neural networks
by
Hakky St
PPTX
An overview of gradient descent optimization algorithms
by
Hakky St
PPTX
Diet networks thin parameters for fat genomic
by
Hakky St
PPTX
強くなるロボティック・ ゲームプレイヤーの作り方3章
by
Hakky St
PPTX
【機械学習プロフェッショナルシリーズ】グラフィカルモデル2章
by
Hakky St
PPTX
Creating basic workflows as Jupyter Notebooks to use Cytoscape programmatically.
by
Hakky St
PPTX
Boosting probabilistic graphical model inference by incorporating prior knowl...
by
Hakky St
PDF
Tensorflow
by
Hakky St
劣モジュラ最適化と機械学習1章
by
Hakky St
劣モジュラ最適化と機械学習 3章
by
Hakky St
劣モジュラ最適化と機械学習 2.4節
by
Hakky St
劣モジュラ最適化と機械学習 2.5節
by
Hakky St
Deep Recurrent Q-Learning(DRQN) for Partially Observable MDPs
by
Hakky St
【機械学習プロフェッショナルシリーズ】グラフィカルモデル1章
by
Hakky St
Hands-On Machine Learning with Scikit-Learn and TensorFlow - Chapter8
by
Hakky St
Reducing the dimensionality of data with neural networks
by
Hakky St
An overview of gradient descent optimization algorithms
by
Hakky St
Diet networks thin parameters for fat genomic
by
Hakky St
強くなるロボティック・ ゲームプレイヤーの作り方3章
by
Hakky St
【機械学習プロフェッショナルシリーズ】グラフィカルモデル2章
by
Hakky St
Creating basic workflows as Jupyter Notebooks to use Cytoscape programmatically.
by
Hakky St
Boosting probabilistic graphical model inference by incorporating prior knowl...
by
Hakky St
Tensorflow
by
Hakky St
スパース性に基づく機械学習(機械学習プロフェッショナルシリーズ) 2.3節〜2.5節
1.
スパース性に基づく機械学習 2.3〜2.5節 機械学習プロフェッショナルシリーズ @St_Hakky
2.
自己紹介と告知 • Twitter :
@St_Hakky • ブログ:http://st-hakky.hatenablog.com/ • 関西で機械学習勉強会を実施中!! • 団体のモットー: • 圧倒的スピード感で大量の書物と論文をぶった切る • 「えっ、まだ読んでないの?」と煽り奉り、輪講会を乱立させる • 過去のイベント例 • PRML輪講会、PRML上巻/下巻一気読み • データ解析のための統計モデリング入門の輪講会 • わかりやすいパターン認識(続)の輪講会 • 参加したい方は、Facebookのグループにまずは参加を。 • URL :https://www.facebook.com/groups/1767916400127792/
3.
スパース性に基づく機械学習の 2.3〜2.5節をやります
4.
コンテンツ • 2.3 :
正則化 • 2.4 : 交差確認 • 2.5 : 制約付き最小化問題と罰則項付き最小化問 題の等価性
5.
正則化 • 仮説集合の大きさの制御方法 • 特徴量の増減だけじゃない! •
→同じ特徴空間であってもパラメータベクトル𝒘をより 小さい集合から選ぶことで分散を減少できる • この様な方法として、パラメータベクトルのノルム の制約がある。
6.
ノルムとは • 関数 ・
∶ ℝ 𝑑 → ℝ が以下の3つの性質を満たす とき、 ・ はノルム(norm)という。 • (斉次性) 任意の𝛼 ∈ ℝ, 𝒙 ∈ ℝ 𝑑に対して、 𝛼𝒙 = 𝛼 𝒙 が成立 • (劣加法性)任意の に対して、 が成立。 • (独立性)
7.
L1,L2,L3ノルム L1ノルム L2ノルム L3ノルム
8.
罰則付き推定量 • 同じ特徴空間であってもパラメータベクトル𝑤をより小さい 集合から選ぶことで分散を減少するためのノルムを使った 一種の方法 • 罰則付き推定量
9.
罰則付き推定量 2.5節で示すが、以下の二つの式は等価 2.20式はノルムで制約があるものの、パラメータ数は11であ り、関数は正則化に関係なく10次の多項式
10.
なぜノルムで分散を減らせるのか? • 説明しよう!
11.
まずは図の説明 罰則項付き最小化問題を幾何学的に解釈す るために作られた図 パラメータ次元d=2で横軸が𝑤1、縦軸が𝑤2である 人工的に生成した回帰問題に対する正則化の 軌跡 真のパラメータ𝑤∗ = (2,1) 𝑇 (黒色の×) サンプル数n=10 (a)の図と合わせて、もう一つ(b)の図があるが、 これらは独立に同分布から生成されたデータであ る 楕円状の等高線上は経験誤差関数の値を表す
12.
なぜノルムで分散を減らせるのか? 正則化パラメータλが大きくなるに 従って、解ωは原点を中心とする 小さい同心円上の内部に制約され る。 すなわち、正則化が強くなるほど、小サンプルに由来する揺らぎが抑えら れ、分散が小さくなることがわかる これにより、別でサンプルされた(a)と(b)の回曲線が近づいていることが わかる。
13.
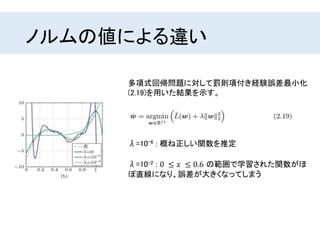
ノルムの値による違い 多項式回帰問題に対して罰則項付き経験誤差最小化 (2.19)を用いた結果を示す。 λ=10-6 : 概ね正しい関数を推定 λ=10-2
: 0 ≤ 𝑥 ≤ 0.6 の範囲で学習された関数がほ ぼ直線になり、誤差が大きくなってしまう
14.
パラメータの数の変化と正則化パラメータの 変化の比較 (c)と(d)の比較 (d):期待誤差は正則化パラメータλ=10-5付近で最小。極端な変化はなし (c):次数p=3付近でやや急峻に誤差が変化 (c)の場合は、p=3以上ではバイアスと呼ぶ誤差要因がゼロになる一方で、(d)で はラムダ=0でない限り、バイアスはゼロにならないから起こる。 (c) : パラメータの数を変化
(d) : 正則化パラメータを変化
15.
2.4 交差確認 • 2.3節で多項式の次数pと正則化パラメータλあるいはCを 調節することでバイアスと分散のトレードオフを測ることが できることを見た。 •
これらのパラメータは、モデルの持つパラメータと区別する ためにハイパーパラメータと呼ぶ。 • ハイパーパラメータを決定する問題はモデル選択という。
16.
データを基にハイパーパラメータの決定 • ハイパーパラメータの決定を客観的にするにはど うしたらいいか? • 訓練データに対する当てはまり:× •
理由:モデルが複雑なほど小さくなる。汎化性能がない • 期待誤差を用いる?:× • 理由:未知の分布に対する期待値が必要なので、基準として 用いることができない • どうする?
17.
データを基にハイパーパラメータの決定 • 一般的に、次の2つがよく用いられる • 検証データを用いる方法 •
交差確認(cross validation)
18.
検証データを用いる方法 • 検証データを用いる方法: • 与えられたデータを訓練用と検証用に分割 •
訓練データでパラメータを学習(ハイパーパラメータは 固定) • 検証データで、検証データに対する誤差を最小にする 様にハイパーパラメータを決定 • 訓練用と検証用の比率は、8:2 or 9:1が一般的
19.
交差確認(cross validation) • 交差確認を用いる方法: •
訓練データをK分割 • K-1個の部分で学習して、誤差評価 • これをすべての1,2,…,K部分で行い、誤差平均を取る • Kは5や10が一般的
20.
検証データを用いる方法と交差確認の比較 • データの規模: • 検証データを用いる方法:大規模データ •
交差確認と比べて計算量が少ないから • 交差確認:小〜中規模データ • データの分割方法: • 検証データを用いる方法:分割を固定することが多い • 検証データに対する誤差に再現性があるため、コンペでもこの方法 を使うことが多い様子。 • 交差確認:分割はランダム
21.
2.5 制約付き最小化問題と罰則項付き最小化問題 の等価性 ここでは、一般の損失関数𝐿と罰則項𝑔に関して、以下の二つの式が等価 であることを説明する ・制約付き最小化問題 ・罰則項付き最小化問題 ここで、損失関数𝐿及び罰則項𝑔は共に凸関数とし、任意の𝐶に関して以 下の集合が有界とする
22.
制約付き最小化問題と罰則項付き最小化問題の等 価性 あるCにおける制約付き最小化問題(2.21) の最小値をL(C)とする 青の実線𝐿(𝐶) :目的関数 の最小値を示す 制約𝑔
𝜔 ≤ Cの元で達成可能な 目的関数𝐿(𝜔)の値の領域 共通部分を持つという制約の中で 最も小さい𝑡に対応する直線 制約なし最小値𝐿0 = 𝑚𝑖𝑛 𝒘 𝐿(𝒘)より𝐿(𝐶)が小 さくなることはないことに注意。 交点の座標が罰則項付き 最小化問題(2.22)の解 𝒘 𝐿 + λ𝐶 = 𝑡
23.
制約付き最小化問題と罰則項付き最小化問題の等 価性 青の実線� (� )
:目的関数 の最小値を示す 制約� � ≤ Cの元で達成可能な 目的関数� (� )の値の領域 共通部分を持つという制約の中で 最も小さい�に対応する直線 交点の座標が罰則項付き 最小化問題(2.22)の解� � + λ� = � この𝐶の値に対する制約付き最小化問題(2.21)の解は、罰則項付き最小 化問題の解 𝒘を含む。 逆に、曲線上側領域の凸性から、任意の𝐶に対して対応するλの値があ り、罰則項付き最小化問題(2.22)の解はこの𝐶に対する制約付き最小化 問題(2.21)の解を含む
24.
おしまい
Download