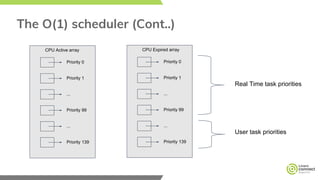
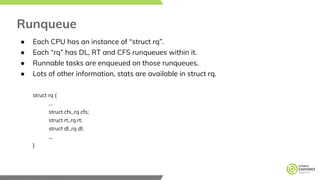
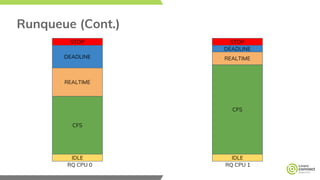
The Linux kernel scheduler manages CPU resources by selecting tasks based on various scheduling classes and policies to ensure fairness, low response times, and efficient CPU balancing. It utilizes different scheduling algorithms including the O(1) scheduler, which was used until replaced by the Completely Fair Scheduler (CFS) in 2007, and features distinct classes such as real-time, deadline, and idle. Each CPU has its own runqueue for scheduling tasks, which is structured for optimized task management across diverse computing environments.